基于软件定义网络的无人驾驶车路网的时空数据解析设计实现方法
- 国知局
- 2024-08-30 14:41:37
本发明涉及无人驾驶领域,具体涉及基于软件定义网络的无人驾驶车路网的时空数据解析设计实现方法。
背景技术:
1、在车联网中的应用主要集中在按照sdn(software defined network,软件定义网络)范式构建车辆通信架构。为了提高计算和通信效率,研究人员已提出了多种解决方案,包括:一种结合移动边缘计算和sdn的avnet(vehicular ad-hoc network,车载随意移动网络)架构,以最大限度地提高联网车辆和无人驾驶车辆的整体资源利用率;一种名为sd-ioav的复合架构,并探讨了能量最小化和负载平衡情况下的控制器放置问题;一种软件定义的车联网(sdiv)架构,并通过在数据平面中引入目的地驱动模型来减少交换机的规则数量;一种与sdn和边缘计算相结合的its(intelligent traffic system,智能交通系统)综合架构,实现无缝网络重新配置和数据处理,同时管理参与的联网车辆和无人驾驶车辆的移动性;一种支持sdn的5g vanet,其中相邻车辆利用sdn的全局信息收集和网络控制功能根据实时路况自适应地形成车群;无人机辅助的sdn-iov系统架构,用于估计无人驾驶车辆和行人的数量。高效、灵活的sd-iov为its提供了综合全面的架构,能够通过无缝的网络配置和数据转发来管理大量的无人驾驶车辆及其交互数据。
2、利用先进的通信和感知技术,无人驾驶车辆已经在开放式场景下实现低速行驶并得到部分地方政府的政策支持,这必将在道路通行效率以及道路安全等方面产生重要影响。现有研究主要集中于有人驾驶交通系统的研究,仅考虑了从局部的路侧基础设施进行交通参数获取和分析,存在以下问题:
3、交通数据采集设备异构,数据不完整且有误差:目前交通数据采集主要依靠路边基础设施,如监控摄像头或感应线圈等,来获取交通流数据。然而不同的基础设施采集数据的方式不同,因此存在多种设备之间的数据不一致或有误差等现象,以及不同的基础设施采集频率不一致的问题,使得难以构建统一的全局路网时空数据解析,不利于实现交通系统的实时监控和管理。
技术实现思路
1、针对目前智能交通系统没有考虑无人驾驶车辆对有人驾驶车辆以及道路环境的影响,从而带来的新的道路通行效率以及道路安全等问题,本发明基于软件定义网络构建了适应于城市场景下的无人驾驶车路网架构,用于管理道路基础设施和无人驾驶车辆实时状态信息的交换,利用车辆状态信息计算速度、占用率和流量三个交通参数,通过数据异常检测和缺失数据补全,提出了无人驾驶车路网时空数据解析方法。仿真实验结果表明,构建的仿真数据集具有和真实数据集相似的分布,并具有更少的离群值,为解决城市场景下无人驾驶低速行驶对道路通行效率以及安全产生的影响提供了可视化的数据集分布,从而对促进无人驾驶健康快速发展,具有重要的意义和应用价值。
2、本发明的技术方案:
3、基于软件定义网络的无人驾驶车路网的时空数据解析设计实现方法,包括如下步骤:
4、步骤1.相关定义;
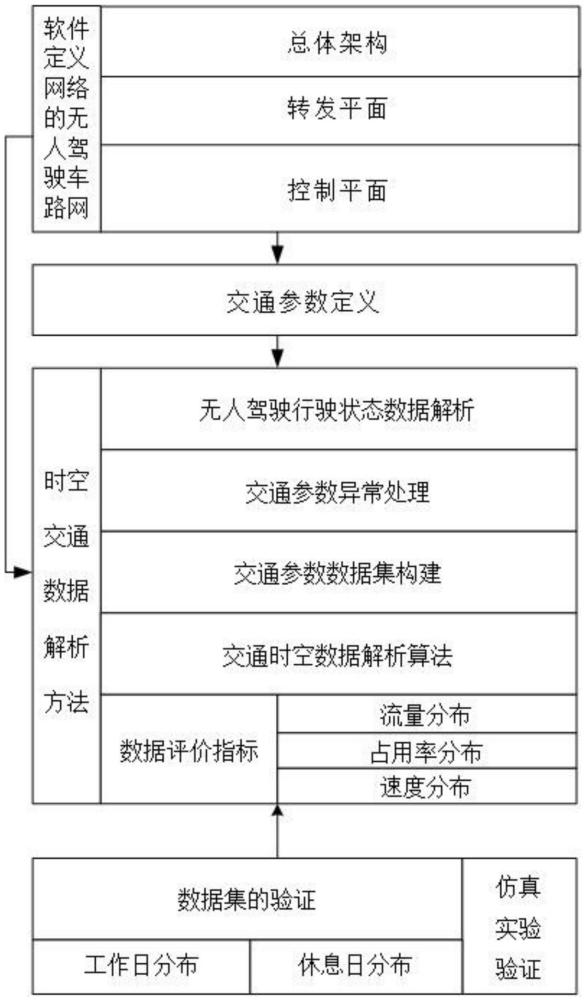
5、步骤2.基于软件定义网络的无人驾驶车路网,包括:
6、步骤2.1总体架构;
7、步骤2.2转发平面;
8、步骤2.3控制平面;
9、步骤3.基于软件定义网络的无人驾驶车路网的时空数据解析算法,包括:
10、步骤3.1无人驾驶行驶状态数据解析;
11、步骤3.2交通参数异常处理;
12、步骤3.3交通参数数据集构建;
13、步骤3.4交通时空数据解析算法。
14、与现有技术相比,本发明具有如下有益效果:
15、本发明公开了无人驾驶低速行驶开放式场景下时空数据集分布,为无人驾驶带来新型交通道路通行效率以及道路安全等方面的研究和应用提供了数据保障,对促进城市场景无人驾驶健康快速发展,具有重要的意义和应用价值。
技术特征:1.基于软件定义网络的无人驾驶车路网的时空数据解析设计实现方法,其特征在于,包括如下步骤:
2.如权利要求1所述的基于软件定义网络的无人驾驶车路网的时空数据解析设计实现方法,其特征在于,所述步骤1:
3.如权利要求1所述的基于软件定义网络的无人驾驶车路网的时空数据解析设计实现方法,其特征在于,所述步骤2:
4.如权利要求1所述的基于软件定义网络的无人驾驶车路网的时空数据解析设计实现方法,其特征在于,所述步骤3:
技术总结本发明属于无人驾驶领域,提出了基于软件定义网络的无人驾驶车路网的时空数据解析设计实现方法,包括:步骤1.相关定义;步骤2.基于软件定义网络的无人驾驶车路网;步骤3.基于软件定义网络的无人驾驶车路网的时空数据解析算法。本发明基于软件定义的无人驾驶车路网架构,用于管理道路基础设施和行驶中的无人驾驶车辆进行实时车辆状态信息交换,并基于车辆状态信息计算速度、占用率和流量三个交通参数,通过数据异常检测和缺失数据补全,提高了采集数据的可靠性。本发明为解决城市场景下无人驾驶低速行驶对道路通行效率以及安全产生的影响提供了可视化的数据集分布,从而对促进无人驾驶健康快速发展,具有重要的意义和应用价值。技术研发人员:程久军,杨露,倪张凯,李湘梅受保护的技术使用者:同济大学技术研发日:技术公布日:2024/8/27本文地址:https://www.jishuxx.com/zhuanli/20240830/283358.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表