一种基于人体生理特性的仿生下肢
- 国知局
- 2024-08-30 14:47:09
本技术涉及医疗器械,更具体地涉及一种基于人体生理特性的仿生下肢。
背景技术:
1、目前下肢残疾患者运动康复训练的主要方法是理疗医师对患者进行半机械或者纯手工的康复训练,这种康复训练方式缺点很多,其一:一名患者需要多名理疗医师进行下肢康复训练,效率低下、治疗效果主观性大;其二:不能精确控制和记录下肢康复训练参数,不利于治疗方案的改进;其三:由于缺少数据,康复评价指标难以客观化,不利于对康复训练规律的深入研究;其四:康复训练只能针对单腿髓、膝关节进行,而双腿及整个下肢的协调训练很难进行;其五:缺少直观的康复训练信息,训练缺乏吸引力,患者参与治疗的主动性不够;而且下肢康复机器存在些许问题,国外产品较为成熟、价格昂贵,患者康复训练中容易疲劳,国内下肢康复机器人工业化生产才刚刚起步不久,产品造型呆板、结构笨重、传统机械治疗过程中重复动作,枯燥无味,没有耐心随着时间的延长,容易疲劳而且效果不好,无法做到每次动作都很标准,而且外观和轻量化方面研究也较少。
2、因此设计一种基于人体生理特性的仿生下肢,有助于开发出更符合人体生理学和人机工程学的仿生下肢产品,提高国内相关新产品的水平和性能,丰富产品结构,提高我国人体义肢产业的竞争力。
技术实现思路
1、为了克服现有技术的上述缺陷,本实用新型提供了一种基于人体生理特性的仿生下肢,以解决上述背景技术中存在的问题。
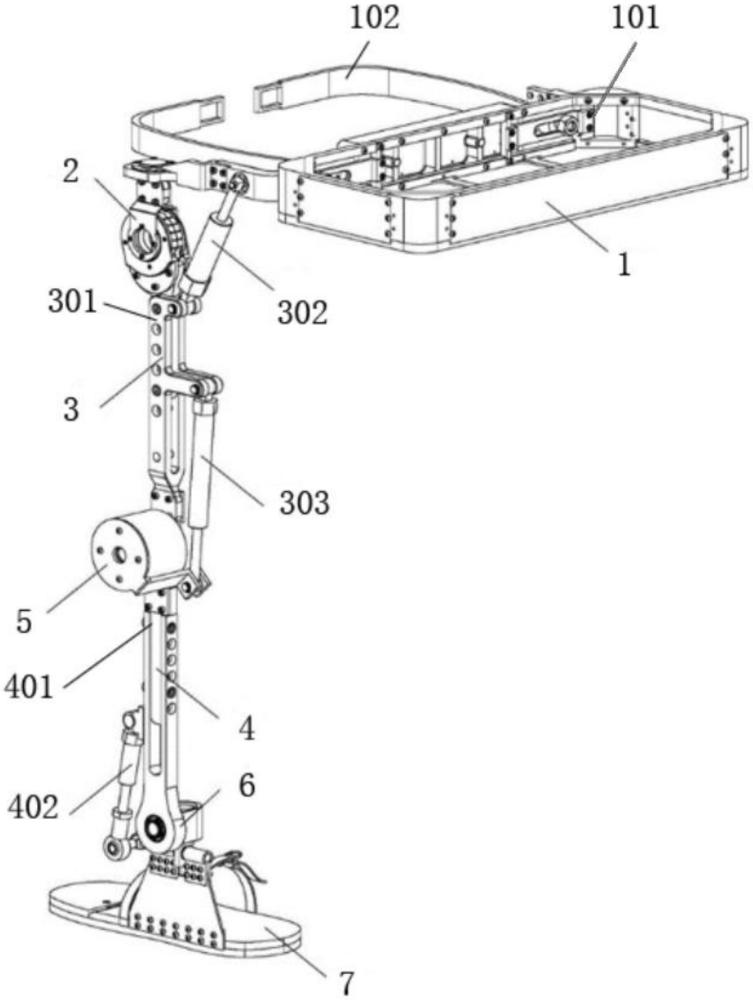
2、本实用新型提供如下技术方案:一种基于人体生理特性的仿生下肢,包括固定机构,所述固定机构的一侧固定连接有髋关节,所述髋关节的内侧活动连接有大腿,所述大腿的外侧活动连接有膝关节,所述膝关节的内部固定连接有小腿,所述小腿的内部活动连接有踝关节,所述踝关节的底部固定连接有足部,所述大腿包括大腿主体,所述大腿主体内侧的上方活动连接有髋关节液压机构,所述大腿主体内侧的下方活动连接有膝关节液压机构。
3、优选的,固定机构包括背托,所述背托的一侧活动连接有腰部固定机构。
4、优选的,小腿包括小腿主体,所述小腿主体内侧活动连接有踝关节液压机构。
5、优选的,髋关节液压机构的一端活动连接在腰部固定机构的内部,所述膝关节液压机构的一端固定连接在膝关节的外侧。
6、优选的,踝关节液压机构的一端活动连接在踝关节的外侧。
7、本实用新型的技术效果和优点:
8、本实用新型通过下肢外骨骼助力机构为单腿七自由度的连杆仿生机构,采用髋关节液压机构、膝关节液压机构和膝关节液压机构三个液压机构驱动,在人体步行过程中,大腿在髋关节液压机构的推动下配合髋关节柔性联轴器完成矢状面内的屈伸运动,小腿在膝关节液压机构的推动下配合膝关节柔性联轴器完成矢状面内的屈伸运动,而足部在踝关节液压机构的推动下绕着踝关节转轴完成矢状面内的屈伸运动,缓解人在大负载和长时间行走情况下极易出现的疲劳,极大增强人们的负载能力、行走速度及运动范围。
技术特征:1.一种基于人体生理特性的仿生下肢,包括固定机构(1),其特征在于:所述固定机构(1)的一侧固定连接有髋关节(2),所述髋关节(2)的内侧活动连接有大腿(3),所述大腿(3)的外侧活动连接有膝关节(5),所述膝关节(5)的内部固定连接有小腿(4),所述小腿(4)的内部活动连接有踝关节(6),所述踝关节(6)的底部固定连接有足部(7),所述大腿(3)包括大腿主体(301),所述大腿主体(301)内侧的上方活动连接有髋关节液压机构(302),所述大腿主体(301)内侧的下方活动连接有膝关节液压机构(303)。
2.根据权利要求1所述的一种基于人体生理特性的仿生下肢,其特征在于:所述固定机构(1)包括背托(101),所述背托(101)的一侧活动连接有腰部固定机构(102)。
3.根据权利要求1所述的一种基于人体生理特性的仿生下肢,其特征在于:所述小腿(4)包括小腿主体(401),所述小腿主体(401)内侧活动连接有踝关节液压机构(402)。
4.根据权利要求1所述的一种基于人体生理特性的仿生下肢,其特征在于:所述髋关节液压机构(302)的一端活动连接在腰部固定机构(102)的内部,所述膝关节液压机构(303)的一端固定连接在膝关节(5)的外侧。
5.根据权利要求3所述的一种基于人体生理特性的仿生下肢,其特征在于:所述踝关节液压机构(402)的一端活动连接在踝关节(6)的外侧。
技术总结本技术涉及医疗器械技术领域,且公开了一种基于人体生理特性的仿生下肢,包括固定机构,所述固定机构的一侧固定连接有髋关节,所述髋关节的内侧活动连接有大腿,所述大腿的外侧活动连接有膝关节,所述膝关节的内部固定连接有小腿,所述小腿的内部活动连接有踝关节,所述踝关节的底部固定连接有足部,通过下肢外骨骼助力机构为单腿七自由度的连杆仿生机构,采用髋关节液压机构、膝关节液压机构和膝关节液压机构三个液压机构的驱动,使得大腿、小腿和足部均能仿照人体生理特性进行矢状面内的屈伸运动,能够缓解人在大负载和长时间行走情况下极易出现的疲劳,大大增强人们的负载能力、行走速度及运动范围。技术研发人员:谈睿,谢哲东,黄兴隆,郭洪宇,董海林,赵城,田雨函,薛琪旋,谢明辉,杨文丽,张洹,刘泽业受保护的技术使用者:吉林农业大学技术研发日:20231027技术公布日:2024/8/27本文地址:https://www.jishuxx.com/zhuanli/20240830/283841.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。