线激光测距标定及解算方法、装置、介质及设备与流程
- 国知局
- 2024-09-05 14:48:00
本申请涉及激光测距,特别是涉及线激光测距标定及解算方法、装置、介质及设备。
背景技术:
1、线激光测距利用三角测距法,由激光器投射出线激光到待测物体上,从相机读回成像数据,通过对光斑的计算得到线激光截面上的物体距离。
2、现有技术中,激光器投射出线激光到待测物体上,从相机读会成像数据,获取成熟数据中线激光投射到待测物体上的激光光斑;根据激光光斑计算得到线激光截面上的物体距离;对相机进行棋盘标定得到相机内参、相机外参;通过三角测距法解算每个亮斑点对应的坐标;并进行误差纠正,激光光斑的亮斑点组成数量大,需要巨大的计算量,需要fpga进行上述解算过程,解算过程复杂,并造成设备成本高。
3、因此,寻找适配的线激光测距标定及解算方式,是本领域技术人员亟待解决的技术问题。
技术实现思路
1、基于此,有必要提出一种线激光测距标定及解算方法、装置、介质及设备,以解决解算计量量大,解算过程复杂的问题。
2、第一方面,本申请提供一种线激光测距标定及解算方法,包括:
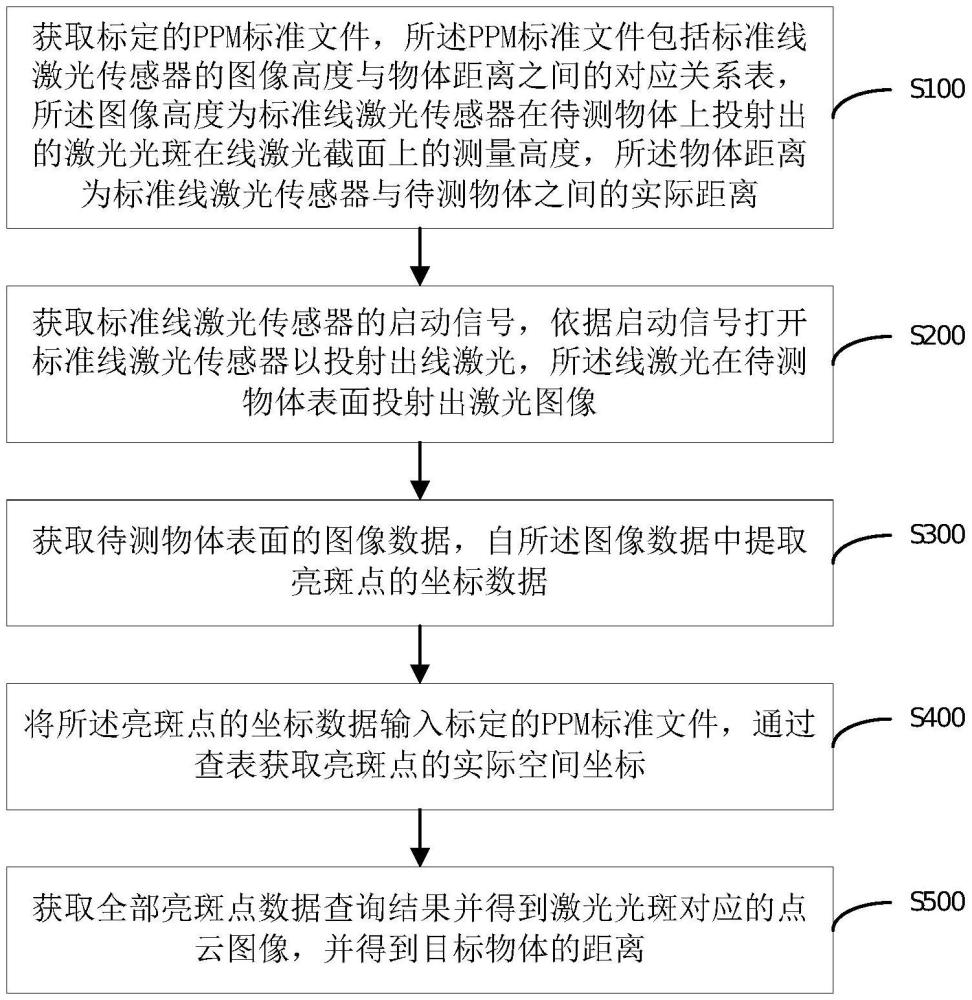
3、获取标定的ppm标准文件,所述ppm标准文件包括标准线激光传感器的图像高度与物体距离之间的对应关系表,所述图像高度为标准线激光传感器在待测物体上投射出的激光光斑在线激光截面上的测量高度,所述物体距离为标准线激光传感器与待测物体之间的实际距离;
4、获取标准线激光传感器的启动信号,依据启动信号打开标准线激光传感器以投射出线激光,所述线激光在待测物体表面投射出激光图像;
5、获取待测物体表面的图像数据,自所述图像数据中提取亮斑点的坐标数据;
6、将所述亮斑点的坐标数据输入标定的ppm标准文件,通过查表获取亮斑点的实际空间坐标;
7、获取全部亮斑点数据查询结果并得到激光光斑对应的点云图像,并得到目标物体的距离。
8、在其中一种实现方式中,所述标定的ppm标准文件为全分辨率的ppm文件,所述对应关系表包括亮斑点在图像数据中的线激光截面上的坐标与实际空间坐标之间的一一对应关系,得到标准线激光传感器的图像高度与物体距离之间的对应关系,全部亮斑点组成激光光斑。
9、在其中一种实现方式中,所述ppm标准文件的标定步骤包括:
10、获取线激光传感器;
11、获取电动滑台,所述电动滑台上设置有待标定的线激光传感器,所述线激光传感器可沿电动滑台的滑轨移动;
12、在电动滑台的滑轨的一端设置白板作为待测物体,所述白板垂直设置在滑轨上;
13、打开线激光传感器,线激光传感器从滑轨的另一端以预设移动速度向白板方向移动,所述线激光在待测物体表面投射出激光图像;
14、线激光传感器的摄像装置按照预设视频帧率录制视频。
15、在其中一种实现方式中,还包括:
16、导出摄像装置的视频文件并获取全部视频帧图像,根据预设移动速度和时间戳计算每帧视频帧图像对应的当前实际距离。
17、在其中一种实现方式中,还包括:
18、对每帧视频帧图像进行二值化操作,获取每个亮斑点的坐标,将全部亮斑点集合成激光光斑,计算激光光斑中心处的y坐标,将y坐标与当前实际距离关联后填入ppm文件并获取标定的ppm标准文件。
19、在其中一种实现方式中,所述获取标定的ppm标准文件的步骤,还包括:
20、通过插值法补充各个实际距离之间的点以得到标定的ppm标准文件。
21、在其中一种实现方式中,所述预设视频帧率为60fps~120fps。
22、第二方面,本申请提供一种线激光测距标定及解算装置,包括:
23、获取标定模块,获取标定的ppm标准文件,所述ppm标准文件包括标准线激光传感器的图像高度与物体距离之间的对应关系表,所述图像高度为标准线激光传感器在待测物体上投射出的激光光斑在线激光截面上的测量高度,所述物体距离为标准线激光传感器与待测物体之间的实际距离;
24、投射模块,获取标准线激光传感器的启动信号,依据启动信号打开标准线激光传感器以投射出线激光,所述线激光在待测物体表面投射出激光图像;
25、获取图像数据模块,获取待测物体表面的图像数据,自所述图像数据中提取亮斑点的坐标数据;
26、第一查询模块,将所述亮斑点的坐标数据输入标定的ppm标准文件,通过查表获取亮斑点的实际空间坐标;
27、第二查询模块,获取全部亮斑点数据查询结果并得到激光光斑对应的点云图像,并得到目标物体的距离。
28、第三方面,本申请提供一种计算机可读存储介质,存储有计算机程序,所述计算机程序被处理器执行时,使得所述处理器执行如第一方面任一项所述的方法的步骤。
29、第四方面,本申请提供一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述计算机程序被所述处理器执行时,使得所述处理器执行如第一方面中任一项所述的方法的步骤。
30、根据本申请提供的线激光测距标定及解算方法、装置、介质及设备,有益效果在于,本申请中通过将标定好的ppm标准文件内置在主控设备中,ppm标准文件包括标准线激光传感器的图像高度与物体距离之间的对应关系表,图像高度为标准线激光传感器在待测物体上投射出的激光光斑在线激光截面上的测量高度,即图像高度为激光光斑的y坐标,物体距离为标准线激光传感器与待测物体之间的实际距离;主控设备可为扫地机器人、巡逻机器人、送餐机器人等。当主控设备工作时,打开设置在主控设备中的标准线激光传感器,并在待测物体表面投射出激光图像,获取待测物体表面的图像数据,自图像数据中提取各个亮斑点坐标数据,将亮斑点的坐标数据输入标定的ppm标准文件中,获取全部亮斑点数据查询结果并得到激光光斑对应的点云图像,并得到目标物体的距离。解算过程简单,不需要复杂的计算,特别是在组成激光光斑的亮斑点数量级大的时候,能够大大减少解算过程,提升解算速率,通过内置本申请的标定解算方法的设备成本也会大幅减少。
技术特征:1.线激光测距标定及解算方法,其特征在于,包括:
2.根据权利要求1所述的线激光测距标定及解算方法,其特征在于,所述标定的ppm标准文件为全分辨率的ppm文件,所述对应关系表包括亮斑点在图像数据中的线激光截面上的坐标与实际空间坐标之间的一一对应关系,得到标准线激光传感器的图像高度与物体距离之间的对应关系,全部亮斑点组成激光光斑。
3.根据权利要求1所述的线激光测距标定及解算方法,其特征在于,所述ppm标准文件的标定步骤包括:
4.根据权利要求3所述的线激光测距标定及解算方法,其特征在于,还包括:
5.根据权利要求4所述的线激光测距标定及解算方法,其特征在于,还包括:
6.根据权利要求5所述的线激光测距标定及解算方法,其特征在于,所述获取标定的ppm标准文件的步骤,还包括:
7.根据权利要求4所述的线激光测距标定及解算方法,其特征在于,所述预设视频帧率为60fps~120fps。
8.一种线激光测距标定及解算装置,其特征在于,包括:
9.一种计算机可读存储介质,其特征在于,存储有计算机程序,所述计算机程序被处理器执行时,使得所述处理器执行如权利要求1至7中任一项所述的方法的步骤。
10.一种计算机设备,其特征在于,包括存储器和处理器,所述存储器存储有计算机程序,所述计算机程序被所述处理器执行时,使得所述处理器执行如权利要求1至7中任一项所述的方法的步骤。
技术总结本申请涉及激光测距技术领域,提供线激光测距标定及解算方法、装置、介质及设备,通过将标定好的PPM标准文件内置在主控设备中,PPM标准文件包括标准线激光传感器的图像高度与物体距离之间的对应关系表,当主控设备工作时,打开设置在主控设备中的标准线激光传感器,并在待测物体表面投射出激光图像,获取待测物体表面的图像数据,自图像数据中提取各个亮斑点坐标数据,将亮斑点的坐标数据输入标定的PPM标准文件中,获取全部亮斑点数据查询结果并得到激光光斑对应的点云图像,并得到目标物体的距离。解算过程简单,特别是在组成激光光斑的亮斑点数量级大的时候,能够大大减少解算过程,提升解算速率。技术研发人员:吴才泽,纪亚萍,黄锐受保护的技术使用者:深圳矽速科技有限公司技术研发日:技术公布日:2024/9/2本文地址:https://www.jishuxx.com/zhuanli/20240905/288163.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表