关注兴趣点与多尺度时序关系的交通事故预测方法及装置
- 国知局
- 2024-09-05 14:50:22
本发明属于交通事故预测领域,涉及一种关注兴趣点与多尺度时序关系的交通事故预测方法及装置。
背景技术:
1、交通事故不仅威胁着驾驶员和乘客的生命安全,还给交通系统和经济带来了沉重的负担。因此,提前预测某一特定道路是否会发生交通事故至关重要。对于交通管理部门来说,能够帮助交通管理部门更好地进行交通规划,提前采取一定的策略,为交通管理和应急救援提供有力支持。对于司机来说,能够提醒他们小心驾驶,更好地规划一个安全的路线,减少事故的发生。
2、在当前人工智能飞速发展的环境下,交通事故预测领域出现了众多方法,主要可分为两类:
3、1)基于传统机器学习模型的方法
4、基于传统机器学习模型的交通事故预测方法包括回归模型,支持向量机、决策树、knn等。此类方法的优点在于方法简单且计算成本较低。但在应对交通事故预测时,由于复杂的时空相关性以及受交通流量、气象条件、道路网络等多种因素的影响,它们很难拟合大量异构特征,也无法充分捕捉复杂的时空关联,从而难以实现高度准确的预测。
5、2)基于深度学习模型的方法
6、近年来随着深度学习的发展,各种深度学习模型如lstm、cnn、gcn等被应用于这一领域。深度学习模型因为其能够拟合大量异构特征,捕捉复杂的时空关联,从而更能有效地学习交通事故数据的非线性时空相关性。这使得其预测效果往往优于基于机器学习的方法。
7、上述的各种方法都存在一些问题:①现有的交通事故方法大多是将城市划分为规则的网格,打破了其地理特征;或者以行政区为粒度进行预测,无法提供更细更精准的道路层面的预测。②现有的道路级交通事故预测方法都是将原始的时序数据输入模型,这样很难挖掘到更深层次的时序关系。③现有的交通事故预测方法要么直接忽略了兴趣点(poi)对事故的影响,要么仅将poi视为静态的道路特征,专注于poi数量而忽视了其功能上的重要性。例如在学校附近往往会有许多餐厅,在这种情况下,学校应该被视为影响附近道路上发生事故的关键poi,但传统方法可能错误地将餐馆视为关键poi。这个问题会导致关键信息的丢失;此外,以往的方法均未考虑不同类型poi在时间维度上对事故发生影响的差异,从而导致模型未能充分捕捉poi与交通事故之间复杂的时空关联,往往这种时空关联是可以作为poi的时空知识辅助模型进行更精准地预测。
8、因此,亟需一种能够准确预测交通事故的方法。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种关注兴趣点与多尺度时序关系的交通事故预测方法及装置,用于提升道路级交通事故预测精度。
2、为达到上述目的,本发明提供如下技术方案:
3、方案一:
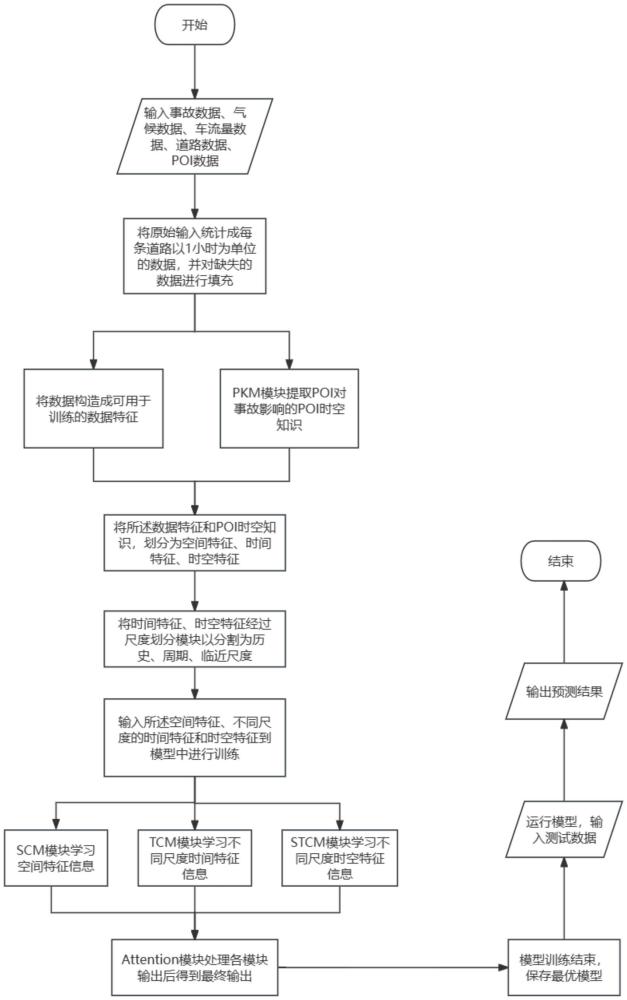
4、一种关注兴趣点与多尺度时序关系的交通事故预测方法,具体包括以下步骤:
5、s1:对数据进行收集与清洗,并提取数据特征;
6、s2:通过poi时空知识挖掘模块(pkm模块)提取兴趣点(poi)对事故影响的poi时空知识;
7、s3:将步骤s1提取的数据特征和poi时空知识融合为新的特征,并将其划分为空间特征、时间特征和时空特征;
8、s4:将时间特征和时空特征经过尺度划分模块以分割为历史、周期和临近尺度;
9、s5:将空间特征、不同尺度的时间特征和时空特征输入至模型中训练,并保存表现最佳的模型;所述模型包括空间卷积模块(scm)、时间卷积模块(tcm)、时空卷积模块(stcm)和注意力模块(attention);
10、s6:向保存的最佳模型中输入测试数据,得到未来某条道路交通事故的预测值。
11、进一步,步骤s1中,所述数据包括事故信息、气候信息、车流量信息、道路信息、poi信息以及预测区域的路网信息;所述事故信息包括目标城市24小时内的所有事故发生地点和时间;所述气候信息包括目标城市24小时内的天气状况、风向和温度信息;所述车流量信息为目标城市每条道路24小时内的车流量数目;所述道路信息包括目标城市每条道路的具体位置、道路类型、道路长度和道路宽度;所述poi信息包括目标城市所有poi的具体位置和poi的类型,所述路网信息包括所预测区域的道路图结构;
12、对数据清洗具体为:选择道路在缺失数据时刻前后2小时的数据,并计算其平均值进行填充;对于仍然缺失的时刻,使用该时刻所有道路的数据的平均值进行填充。
13、进一步,步骤s2中,所述pkm模块用于将poi数据与道路和碰撞事故数据联系起来,以提取poi与碰撞事故发生可能性之间的时空关系,从而确定不同类型的poi在不同时间对道路碰撞事故的影响;
14、所述pkm模块处理数据的具体步骤如下:
15、s21:输入poi数据和道路数据,通过以下公式计算第j类poi与某条道路的相关性权重idf(qj):
16、
17、其中,qj表示第j类poi,n为道路的总数,n(qj)为周围有第j类poi的道路的数目;
18、s22:计算第j类poi与某条道路的相关性分数r(qj):
19、
20、其中,k和b是自由参数,通常设置为2和0.75,fj表示所有道路附近的第j种poi类别的数目;dl表示一条道路附近的所有poi的数量;avgdl表示所有道路附近的poi的平均数量;
21、s23:计算第j类poi对第i条道路的加权关联得分以此获得每种类型的poi对每条道路交通事故发生概率的影响权重,将其作为poi空间宏观知识;
22、
23、s24:输入poi数据和交通事故数据,计算第j种poi在第t时刻与事故的相关性分数将其作为poi时间宏观知识;
24、
25、其中,表示t时刻第j种poi附近发生交通事故的数目,t表示一周的总天数或一天的总小时数,设置为7与24。
26、进一步,步骤s3中,在数据特征和poi时空知识融合中,数值型的数据经过z-score归一化后直接作为数据特征;所述数据特征包括事故特征、气候特征、该时刻的日历信息、车流量特征和道路特征,均为数值型;所述poi时空知识包括每种类型的poi在每个时间段对事故发生的影响权重(poi时间知识)与每种类型的poi对每条道路交通事故发生概率的影响权重(poi空间知识),均为数值型;将poi时空知识与数据特征分别在时间和空间维度上进行拼接;之后,将道路特征和poi空间知识视为模型输入的空间特征;将气候特征和对应时刻的日历信息和poi时间知识视为模型输入的时间特征;将车流量特征视为模型输入的时空特征。
27、进一步,步骤s4中,所述尺度划分模块用于将时间特征和时空特征划分为预测目标此前按序的若干小时信息、临近小时信息和若干间隔k周的信息,以便捕获交通事故发生的日常模式、短期趋势和长期周期模式;
28、所述尺度划分模块处理数据的具体步骤如下:
29、s41:输入的时空与时间特征先经过滑动窗口以步长为1进行处理后得到输入矩阵
30、g∈rn×f,n表示获取的总小时数,f表示每小时的特征数;
31、s42:将n分别设置为24、6以获取预测时刻前24小时、6小时的时间和时空特征,从而提取特征的日常模式和临近趋势;
32、s43:输入的时空与时间特征先经过滑动窗口以步长为t进行处理后得到输入矩阵g∈rn×f;
33、s44:将k设置为168,n设置为12,以获取预测时刻前以7天为间隔的相同时刻的12个时间和时空特征,从而提取特征的长期周期模式;
34、s45:将以上三种不同尺度的时间和时空特征输出。
35、进一步,步骤s5中,所述scm用于根据空间特征学习时间维度上不变的信息如道路结构和poi空间发布对于事故的影响;
36、所述scm处理数据的具体步骤如下:
37、s501:输入的空间特征经过全连接层将特征维度降至25;
38、s502:将降维后的空间特征输入至堆叠4层的gcn;
39、s503:将gcn的输出经过relu激活函数进行激活;
40、relu(x)=max(0,x)
41、s504:将激活后的输出经过batch normalization进行归一化;
42、s505:将s504的输出作为s501的输入,以此重复3次并将每次的结果相加;
43、s506:将最后一次s504的输出作为到scm模块最终的输出。
44、进一步,步骤s5中,所述tcm用于根据时间特征学习仅在时间维度上改变而空间维度上不变的信息如天气和poi在不同时刻对于事故的影响;
45、所述tcm处理数据的具体步骤如下:
46、s511:将输入的不同尺度的时序特征分别输入至cnn和lstm,并设置cnn和lstm的输出维度为10;
47、s512:将cnn的输出经过平均池化以减少维度,然后与lstm的输出进行拼接,得到tcm最终的输出。
48、进一步,步骤s5中,所述stcm用于根据时空特征学习在时间和空间维度上均改变的信息如车流量在不同道路和不同时刻对于事故的影响;
49、所述stcm处理数据的具体步骤如下:
50、s521:将输入的不同尺度的时空特征分别输入至堆叠3层的gcn;
51、s522:将经过堆叠3层gcn的输出输入至cnn;
52、s523:将经过cnn后的输出再次作为s521的输入,重复此过程3次并将每次的结果进行拼接;
53、s524:将最后一次s522的输出作为stcm模块的输出。
54、进一步,步骤s5中,所述注意力模块用于将scm、tcm和stcm的输出融合,有选择地关注当前对事故发生影响重要特征,并输出最终的预测结果;
55、所述注意力模块处理数据的具体步骤如下:
56、s531:将scm、tcm和stcm的输出进行拼接;
57、s532:将拼接后的特征输入经过多头自注意力机制运算后进行输出,其中设置其注意力头数为3,输出维度为60;
58、s533:将经过运算后的输出向量经过线性层降维,将其维度降为1;
59、s534:将降维后的向量经过sigmoid函数得到最终的输出。
60、
61、方案二:
62、一种关注兴趣点与多尺度时序关系的交通事故预测装置,包括数据预处理模块、特征提取模块、poi时空知识挖掘模块(pkm模块)、知识融合与特征构造模块、模型训练模块和事故概率预测模块;
63、所述数据预处理模块用于将原始的事故信息、气候信息、车流量信息、道路信息和poi信息进行处理,得到目标城市以小时为单位统计的数据,并将每条道路上其他信息的缺失值进行填补;并以目标城市每条道路每小时发生交通事故的概率作为每条数据的标签;
64、所述特征提取模块用于将处理过后的数据转换成可用于学习的数据特征;
65、所述pkm模块用于从提取的数据特征中挖掘出poi时空知识;
66、所述知识融合与特征构造模块用于将数据特征和poi时空知识进行拼接融合,根据其原始数据的特点(仅在空间维度上变化、仅在时间维度上变化、在空间和时间维度上均变化)构造成空间、时间和时空特征,并对时间和时空特征进行多尺度划分;
67、所述模型训练模块用于对输入的所有特征进行训练,设置验证loss为f1-score,保存f1-score值最大的模型;所述模型训练模块包括scm、tcm、stcm和注意力模块;
68、所述事故概率预测模块根据输入的测试数据,运行保存的最佳模型后预测出未来某条道路发生交通事故的概率值。
69、本发明的有益效果在于:本发明在道路级交通事故预测任务中,不仅将poi信息作为数据特征,还通过本发明提出的pkm模块来关联poi、道路和事故数据,以此挖掘poi在空间和时间上对事故影响的关系。采用将这种关系作为先验知识来辅助模型训练的方式,可以更全面地揭示poi与事故之间存在的复杂时空关联;本发明提出的尺度划分模块将原始时间、时空特征划分为历史、周期、临近三种不同的尺度,可以让模型学习到每条道路上事故发生的日常模式、长期周期模型和短期趋势,从而对时变数据进行综合学习;scm、tcm、stcm模块可以针对不同特点的数据(仅在空间维度上变化、仅在时间维度上变化、时间和空间维度上都变化)进行针对性地学习,充分捕捉所有数据的特点;attention模块能够有选择地关注当前对事故发生影响重要特征。结合以上模块的模型较以往的模型展现出了更准确的预测结果。
70、本发明的其他优点、目标和特征在某种程度上将在随后的说明书中进行阐述,并且在某种程度上,基于对下文的考察研究对本领域技术人员而言将是显而易见的,或者可以从本发明的实践中得到教导。本发明的目标和其他优点可以通过下面的说明书来实现和获得。
本文地址:https://www.jishuxx.com/zhuanli/20240905/288378.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表