一种船舶航行智能化避碰方法及系统与流程
- 国知局
- 2024-09-05 14:34:06
本技术涉及船舶,尤其是涉及一种船舶航行智能化避碰方法及系统。
背景技术:
1、目前船舶是能航行或停泊于水域进行运输或作业的交通工具,按不同的使用要求而具有不同的技术性能、装备和结构型式。船舶在航行过程中,可能会遇到各种障碍物,导致船舶破损、漏水或被藤蔓植物缠绕影响船舶航行,因此对船舶航行时的避碰监测至关重要。
2、现有船舶航行智能化避碰系统通常配备雷达和自动识别系统,用于监测周围环境障碍物的位置和运动状态,帮助识别潜在的碰撞风险,然而现有的船舶航行智能化避碰系统的避障检测区域是固定的,无法根据气象环境对避障检测区域进行变化,船舶航行避障的准确性较低且浪费人力物力资源,存在改进之处。
技术实现思路
1、为了提高船舶航行避障的准确性,本技术提供了一种船舶航行智能化避碰方法及系统。
2、第一方面,本技术提供的一种船舶航行智能化避碰方法,采用如下的技术方案:
3、一种船舶航行智能化避碰方法,包括以下步骤:
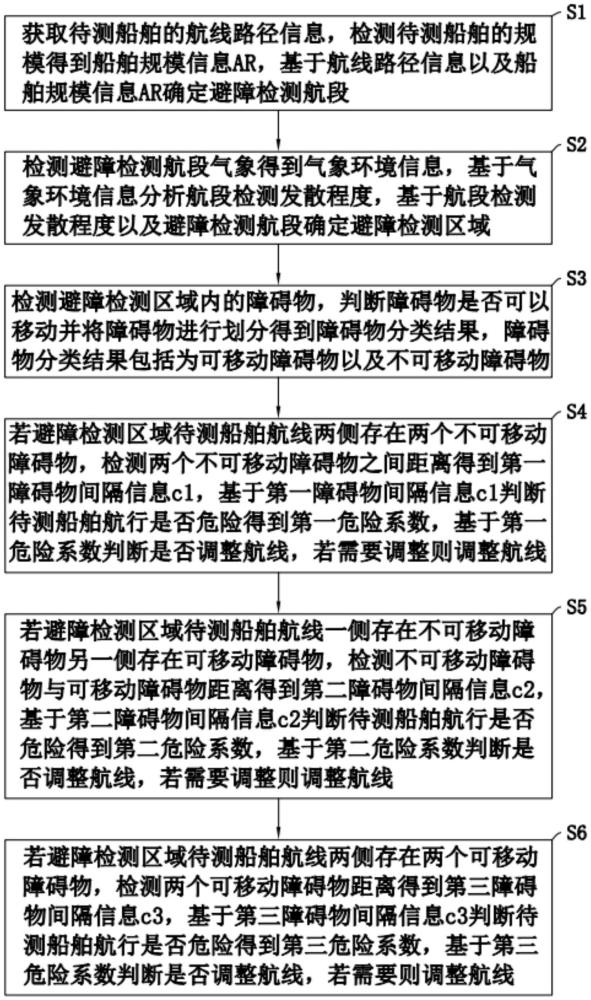
4、获取待测船舶的航线路径信息,检测待测船舶的规模得到船舶规模信息ar,基于航线路径信息以及船舶规模信息ar确定避障检测航段;
5、对避障检测航段的气象进行检测得到气象环境信息,基于气象环境信息分析航段检测发散程度,基于航段检测发散程度以及避障检测航段确定避障检测区域;
6、检测避障检测区域内的障碍物,判断障碍物是否可以移动并将障碍物进行划分得到障碍物分类结果,障碍物分类结果包括为可移动障碍物以及不可移动障碍物;
7、若避障检测区域内待测船舶航线两侧分别存在两个不可移动障碍物,检测两个不可移动障碍物之间的距离得到第一障碍物间隔信息c1,基于第一障碍物间隔信息c1判断待测船舶航行是否存在危险并得到第一危险系数,基于第一危险系数判断是否调整航线,若需要调整则对待测船舶的航线进行调整;
8、若避障检测区域内待测船舶航线一侧存在不可移动障碍物,另一侧存在可移动障碍物,检测不可移动障碍物与可移动障碍物之间的距离得到第二障碍物间隔信息c2,基于第二障碍物间隔信息c2判断待测船舶航行是否存在危险并得到第二危险系数,基于第二危险系数判断是否调整航线,若需要调整则对待测船舶的航线进行调整;
9、若避障检测区域内待测船舶航线两侧分别存在两个可移动障碍物,检测两个可移动障碍物之间的距离得到第三障碍物间隔信息c3,基于第三障碍物间隔信息c3判断待测船舶航行是否存在危险并得到第三危险系数,基于第三危险系数判断是否调整航线,若需要调整则对待测船舶的航线进行调整。
10、优选的,获取待测船舶的航线路径信息并将航线路径信息进行缓存处理;
11、基于航线路径信息,获取待测船舶的航线路径的历史碰撞事故信息,所述历史碰撞事故信息包括历史碰撞次数以及每次碰撞的历史碰撞程度;
12、将待测船舶的航线路径上每次碰撞的历史碰撞程度进行取平均值计算得到路径危险系数al;
13、检测待测船舶的体积得到船舶体积信息v,检测待测船舶的重量得到船舶重量信息g;
14、根据船舶体积信息v以及船舶重量信息g,基于规模关联函数ar=a1×v+a2×g进行计算得到船舶规模信息ar,其中,a1、a2为比例因子且均大于0;
15、根据路径危险系数al以及船舶规模信息ar,基于航段关联函数ah=a3×al+a4×ar进行计算得到避障检测航段占比系数ah,其中,a3、a4为比例因子且均大于0;
16、基于避障检测航段占比系数ah以及航线路径信息确定避障检测航段。
17、优选的,对避障检测航段的气象环境进行实时检测得到气象环境信息,所述气象环境信息包括空气流动信息以及降水信息,所述空气流动信息包括风力等级信息以及风压信息,所述降水信息包括水平降水信息以及垂直降水信息;
18、基于船舶规模信息ar预设标准风力等级信息以及标准风压信息;
19、将风力等级信息与预设的标准风力等级信息进行比较得到风力等级比较结果,基于风力等级比较结果,若风力等级信息小于或等于标准风力等级信息则记为风力正常,若风力等级信息大于标准风力等级信息则记为强风风力情况;
20、当处于强风情况时计算风力风力等级信息与标准风力等级信息之间的差值得到风力等级差值,基于风力等级差值得到强风风力程度;
21、将风压信息与预设的标准风压信息进行比较得到风压比较结果,基于风压比较结果,若风压信息小于或等于标准风压信息则记为风压正常,若风压信息大于标准风压信息则记为强风风压情况;
22、当处于强风风压情况时计算风压信息与标准风压信息之间的差值得到风压差值,基于风压差值得到强风风压程度;
23、基于强风风力程度以及强风风压程度得到空气流动恶劣程度by。
24、优选的,所述水平降水信息包括能见度信息,基于能见度信息确定水平降水环境恶劣程度bv;
25、所述垂直降水信息包括降水类型信息以及降水量信息,其中,降水类型信息包括降雨信息、降雪信息以及降冰雹信息,当接收降冰雹信息时检测冰雹的平均大小得到冰雹大小信息bd,其中,降水量信息包括降雨量信息、降雪量信息以及降冰雹数量信息;
26、基于船舶规模信息ar预设标准降雨量信息、标准降雪量信息以及标准降冰雹数量信息;
27、当未出现垂直降水情况时,垂直降水环境恶劣程度bq为0,当出现垂直降水情况时,基于降水类型信息确定降水类型影响系数bl;
28、当出现降雨情况时,将降雨量信息与预设的标准降雨量信息进行比较得到降雨量比较结果,若降雨量信息大于标准降雨量信息则计算差值得到降雨量差值,基于降雨量差值得到降雨量影响系数bc;
29、当出现降雪情况时,将降雪量信息与预设的标准降雪量信息进行比较得到降雪量比较结果,若降雪量信息大于标准降雪量信息则计算差值得到降雪量差值,基于降雪量差值得到降雪量影响系数bx;
30、当出现降冰雹情况时,将降冰雹数量信息与预设的标准降冰雹数量信息进行比较得到降冰雹数量比较结果,若降冰雹数量信息大于标准降冰雹数量信息则计算差值得到降冰雹数量差值s,根据降冰雹数量差值s以及冰雹大小信息bd,基于冰雹关联函数bd=b1×s×bd进行计算得到降冰雹数据影响系数br,其中b1为比例因子且大于0;
31、基于降雨量影响系数bc、降雪量影响系数bx以及降冰雹数据影响系数br得到降水量影响系数bw,根据降水类型影响系数bl以及降水量影响系数bw,基于垂直降水关联函数bq=b2×bl+b3×bw进行计算得到垂直降水环境恶劣程度bq,其中,b2、b3为比例因子且均大于0;
32、综合水平降水环境恶劣程度bv以及垂直降水环境恶劣程度bq,基于降水环境关联函数bp=b4×bv+b5×bq进行计算得到降水环境恶劣程度bp,其中,b4、b5为比例因子且均大于0。
33、优选的,综合空气流动恶劣程度by以及降水环境恶劣程度bp,基于气象关联函数ost=ω1×by+ω2×bp进行计算得到气象环境恶劣系数ost,其中,ω1、ω2为比例因子且均大于0;
34、基于气象环境恶劣系数ost以及船舶规模信息ar得到航段检测发散程度;
35、基于避障检测航段以及航段检测发散程度确定避障检测区域。
36、优选的,基于船舶规模信息ar得到船舶吃水深度信息;
37、基于待测船舶吃水深度信息预设避障检测区域所需检测的水域深度得到避障水域检测深度信息;
38、基于避障检测区域以及避障水域检测深度信息,对障碍物进行检测得到障碍物信息;
39、基于障碍物信息判断障碍物是否可以移动并将障碍物进行划分得到障碍物分类结果,其中,障碍物分类结果包括可移动障碍物以及不可移动障碍物。
40、优选的,若避障检测区域内待测船舶航线两侧分别存在两个不可移动障碍物,则检测待测船舶航线两侧的两个不可移动障碍物之间的距离得到第一障碍物间隔信息c1;
41、获取待测船舶的船舶尺寸信息,所述船舶尺寸信息包括船舶最大长度m以及船舶最小长度n;
42、将船舶最大长度m与第一障碍物间隔信息c1进行比较得到第一最大比较结果,将船舶最小长度n与第一障碍物间隔信息c1进行比较得到第一最小比较结果;
43、基于第一最大比较结果以及第一最小比较结果,若c1>m,则待测船舶航行不存在危险,即第一危险系数最低;若n≤c1≤m,则基于气象环境恶劣系数ost得到第一危险系数,其中气象环境恶劣系数ost越大则第一危险系数越大;若c1<n,则待测船舶航行存在危险,即第一危险系数最高;
44、将第一危险系数与预设的第一危险系数阈值进行比较,若第一危险系数大于预设的第一危险系数阈值,则对待测船舶的航线进行调整。
45、优选的,若避障检测区域内待测船舶航线一侧存在不可移动障碍物,另一侧存在可移动障碍物,则检测避障检测区域内待测船舶航线两侧的不可移动障碍物与可移动障碍物之间的距离得到第二障碍物间隔信息c2;
46、将船舶最大长度m与第二障碍物间隔信息c2进行比较得到第二最大比较结果,将船舶最小长度n与第二障碍物间隔信息c2进行比较得到第二最小比较结果;
47、基于第二最大比较结果以及第二最小比较结果,若c2>m,则待测船舶航行不存在危险,即第二危险系数最低,无需对待测船舶的航线进行调整;
48、基于第二最大比较结果以及第二最小比较结果,若n≤c2≤m,则检测可移动障碍物的移动性能得到障碍移动性能系数dw,基于定位传感器对可移动障碍物进行定位识别得到可移动障碍物位置信息,基于可移动障碍物位置信息计算待测船舶与可移动障碍物之间的直线距离得到移动障碍直线距离信息da;
49、在待测船舶的船身安装有喷气装置,建立所述喷气装置与所述定位传感器之间的信号链路,获取喷气装置中喷出风力的大小即喷气风力信息;获取待测船舶在避障检测区域内的水域流向得到水域流向信息以及获取待测船舶在避障检测区域内的水域流速得到水域流速信息;
50、基于喷气风力信息、水域流向信息以及水域流速信息得到喷气装置喷出风力对水流的影响得到喷气水流影响系数de;
51、根据喷气水流影响系数de、移动障碍直线距离信息da以及障碍移动性能系数dw,基于喷气关联函数dq=d1×de+d2×da+d3×dw进行计算得到喷气障碍影响系数dq,其中,d1、d2、d3为比例因子且均大于0;
52、基于喷气障碍影响系数dq得到喷气装置的喷气风力推动可移动障碍物的距离得到喷气作用距离信息,将喷气作用距离信息与移动障碍直线距离信息da进行比较,若喷气作用距离信息大于移动障碍直线距离信息da,则无需对待测船舶的航线进行调整,若喷气作用距离信息小于或等于移动障碍直线距离信息da,则需要对待测船舶的航线进行调整;
53、基于第二最大比较结果以及第二最小比较结果,若c2<n,则待测船舶航行存在危险,即第二危险系数最高,需要对待测船舶的航线进行调整。
54、优选的,若避障检测区域内待测船舶航线两侧分别存在两个可移动障碍物,则检测避障检测区域内待测船舶航线两侧可移动障碍物之间的距离得到第三障碍物间隔信息c3;
55、将船舶最大长度m与第三障碍物间隔信息c3进行比较得到第三最大比较结果,将船舶最小长度n与第三障碍物间隔信息c3进行比较得到第三最小比较结果;
56、基于第三最大比较结果以及第三最小比较结果,若c3>m,则待测船舶航行不存在危险,即第三危险系数最低,无需对待测船舶的航线进行调整;
57、基于第三最大比较结果以及第三最小比较结果,若n≤c3≤m,则第三危险系数较低,无需对待测船舶的航线进行调整,基于喷气装置对待测船舶在避障检测区域航线两侧的可移动障碍物进行喷气操作;
58、基于第三最大比较结果以及第三最小比较结果,若c3<n,则第三危险系数最高,基于定位传感器对待测船舶在避障检测区域航线左侧的可移动障碍物进行定位识别得到左侧可移动障碍物位置信息,基于定位传感器对待测船舶在避障检测区域航线右侧的可移动障碍物进行定位识别得到右侧可移动障碍物位置信息,基于左侧可移动障碍物位置信息计算待测船舶与左侧可移动障碍物之间的直线距离得到左侧移动障碍直线距离信息,基于右侧可移动障碍物位置信息计算待测船舶与右侧可移动障碍物之间的直线距离得到右侧移动障碍直线距离信息,检测左侧可移动障碍物的移动性能得到左侧障碍移动性能系数,检测右侧可移动障碍物的移动性能得到右侧障碍移动性能系数;
59、根据喷气水流影响系数de、左侧移动障碍直线距离信息以及左侧障碍移动性能系数得到左侧喷气障碍影响系数,根据喷气水流影响系数de、右侧移动障碍直线距离信息以及右侧障碍移动性能系数得到右侧喷气障碍影响系数;
60、基于左侧喷气障碍影响系数得到喷气装置的喷气风力推动待测船舶左侧可移动障碍物的距离得到左侧喷气作用距离信息,基于右侧喷气障碍影响系数得到喷气装置的喷气风力推动待测船舶右侧可移动障碍物的距离得到右侧喷气作用距离信息;
61、将左侧喷气作用距离信息与左侧移动障碍直线距离信息进行比较,若左侧喷气作用距离信息大于左侧移动障碍直线距离信息,则无需对待测船舶的航线进行调整,若左侧喷气作用距离信息小于或等于左侧移动障碍直线距离信息,则输出第一航线调整信息,将右侧喷气作用距离信息与右侧移动障碍直线距离信息进行比较,若右侧喷气作用距离信息大于右侧移动障碍直线距离信息,则无需对待测船舶的航线进行调整,若右侧喷气作用距离信息小于或等于右侧移动障碍直线距离信息,则输出第二航线调整信息;
62、基于逻辑或门接收到第一航线调整信息或第二航线调整信息,则第三危险系数高,需要对待测船舶的航线进行调整。
63、第二方面,本技术提供了一种船舶航行智能化避碰系统,采用如下的技术方案:
64、一种船舶航行智能化避碰系统,包括:
65、避障检测航段确定模块,配置为获取待测船舶的航线路径信息,检测待测船舶的规模得到船舶规模信息ar,基于航线路径信息以及船舶规模信息ar确定避障检测航段;
66、避障检测区域确定模块,配置为对避障检测航段的气象进行检测得到气象环境信息,基于气象环境信息分析航段检测发散程度,基于航段检测发散程度以及避障检测航段确定避障检测区域;
67、障碍物分类模块,配置为检测避障检测区域内的障碍物,判断障碍物是否可以移动并将障碍物进行划分得到障碍物分类结果,障碍物分类结果包括为可移动障碍物以及不可移动障碍物;
68、第一状态分析模块,配置为若避障检测区域内待测船舶航线两侧分别存在两个不可移动障碍物,检测两个不可移动障碍物之间的距离得到第一障碍物间隔信息c1,基于第一障碍物间隔信息c1判断待测船舶航行是否存在危险并得到第一危险系数,基于第一危险系数判断是否调整航线,若需要调整则对待测船舶的航线进行调整;
69、第二状态分析模块,配置为若避障检测区域内待测船舶航线一侧存在不可移动障碍物,另一侧存在可移动障碍物,检测不可移动障碍物与可移动障碍物之间的距离得到第二障碍物间隔信息c2,基于第二障碍物间隔信息c2判断待测船舶航行是否存在危险并得到第二危险系数,基于第二危险系数判断是否调整航线,若需要调整则对待测船舶的航线进行调整;
70、第三状态分析模块,配置为若避障检测区域内待测船舶航线两侧分别存在两个可移动障碍物,检测两个可移动障碍物之间的距离得到第三障碍物间隔信息c3,基于第三障碍物间隔信息c3判断待测船舶航行是否存在危险并得到第三危险系数,基于第三危险系数判断是否调整航线,若需要调整则对待测船舶的航线进行调整。
71、综上所述,本技术包括以下至少一种有益技术效果:
72、1.通过航线路径信息以及船舶规模信息ar确定避障检测航段,根据气象环境信息分析航段检测发散程度,基于航段检测发散程度以及避障检测航段确定避障检测区域,提高了待测船舶航行区域检测准确性,检测避障检测区域内的障碍物并划分为可移动障碍物以及不可移动障碍物,分别分析当待测船舶航线两侧存在两个不可移动障碍物、待测船舶航线一侧存在不可移动障碍物另一侧存在可移动障碍物以及待测船舶航线两侧存在两个可移动障碍物三种情况下,待测船舶航行是否存在危险,若存在危险则对航线进行调整,进一步提高了待测船舶航行避障的准确性;
73、2.借助当气象环境恶劣时,避障检测航段环境可能受到气象环境的影响导致较大变化,因此只对避障检测航段进行检测准确性较低,需要对避障检测航段周围区域进行检测,通过气象环境恶劣系数ost确定航段检测发散程度,再根据避障检测航段以及航段检测发散程度确定避障检测区域,提高了避障检测区域的检测准确性,进而提高了船舶航行避障的准确性。
本文地址:https://www.jishuxx.com/zhuanli/20240905/287016.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
山火预警处理一体化小车
下一篇
返回列表