一种基于车辆重识别技术的停车引导系统及方法、电子设备、存储介质
- 国知局
- 2024-09-05 14:24:17
本发明涉及智能交通,尤其涉及一种基于车辆重识别技术的停车引导系统及方法、电子设备、存储介质。
背景技术:
1、现有停车场的停车系统和停车引导系统,均采用红外传感器或摄像头对停车场内所有车位状态进行监测,通过对红外传感器或摄像头的反馈信号判断、显示停车场的剩余车位数。
2、上述停车系统和停车引导系统基于场内所有车位的状态监测,使用pvd车位检测和led停车区域引导屏对车主进行剩余车位提醒和引导,告知车主在当前行驶区域内大概哪个区域有空余车位。采用引导屏的方式引导车主停车仍然主要靠车主边驾驶边观察led停车指示屏的显示数据,完成停车引导,并非是通过停车系统和停车引导系统发起的基于空车位所长区域和车主所在区域的分析进行的策划引导。车主自行观察led停车指示屏的引导方式需要车主时刻关注路中的pvd车位检测器的状态,需要找到绿灯才能把车停入空车位中。
3、基于上述的停车引导方式,当该停车场剩余的空车位数量较少的时候,车主需要在停车场内花费极高的时间成本才能找到停车位,或是车主在停车场中陷入盲目转圈而找不到车位的情况,使车主的停车体验不佳;并且在寻找车位的过程中,车辆产生的能耗以及产生的二氧化碳排放量也会骤增,使停车场环境恶劣,增加了停车场环境维护的成本。
技术实现思路
1、基于此,本发明的目的在于提供一种基于车辆重识别技术的停车引导系统,旨在解决现有停车引导系统无法准确的引导车主驾驶至就近的空车位的问题。
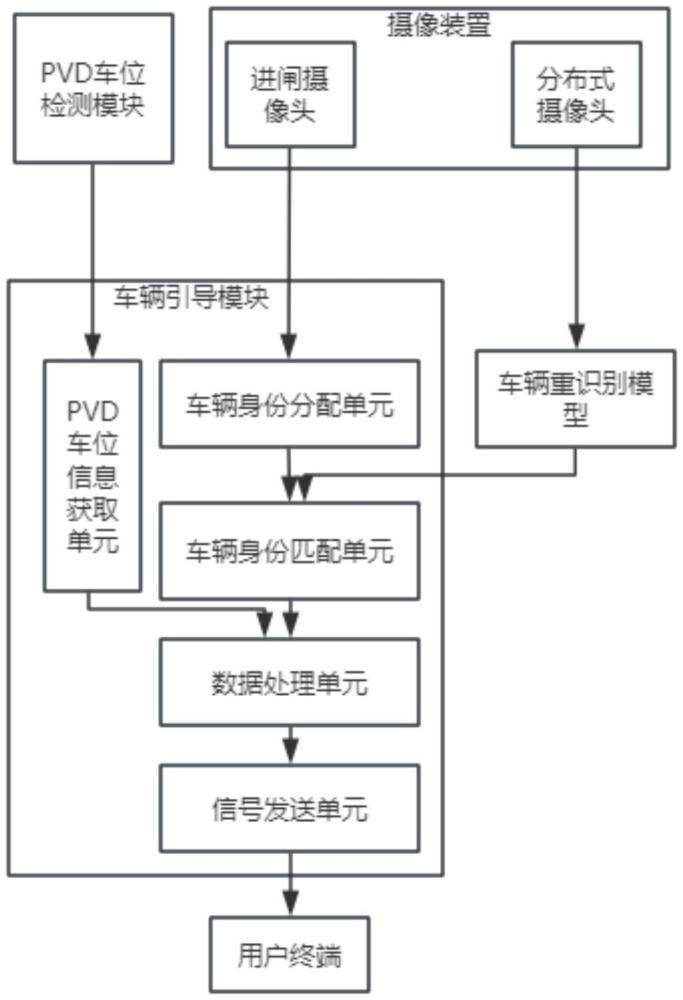
2、一种基于车辆重识别技术的停车引导系统,包括:
3、摄像模块,其包括进闸摄像头、若干分布式摄像头,其中,进闸摄像头拍摄进场车辆的进场图像,分布式摄像头拍摄进场车辆的经过图像;
4、车辆重识别模型,其根据所述车辆的经过图像获得车辆预测身份;
5、pvd车位检测模块,其提供停车场的空车位分布信息;
6、车辆引导模块,其为所述车辆的进场图像分配车辆编码身份;并根据车辆预测身份确定匹配的车辆编码身份,进而获得车辆编码身份的当前位置信息;并根据当前位置信息获取当前位置所属区域的空车位分布信息;并基于当前位置信息和当前位置所属区域的空车位信息生成并发送当前时刻停车行进路径规划。
7、进一步地,所述车辆引导模块包括:
8、pvd车位信息获取单元,用于获取pvd车位检测模块提供的空车位分布信息;
9、车辆身份分配单元,用于根据进场图像向进场车辆分配车辆编码身份;
10、车辆身份匹配单元,用于获取车辆重识别模型输出的车辆预测身份,并对车辆预测身份和车辆编码身份进行匹配,确定车辆预测身份对应的车辆编码身份;
11、数据处理单元,用于根据车辆编码身份对应的时序信息和空间位置信息,确认该车辆编码身份对应车辆的当前位置信息;并根据当前位置信息和当前位置所属区域的空车位信息生成当前时刻停车行进路径规划;
12、信号发送单元,用于将当前时刻停车行进路径规划发送至车辆编码身份对应的用户终端。
13、进一步地,所述车辆重识别模型的框架由深度学习模型中的卷积神经网络cnn或图神经网络gnn或注意力机制transformer作为基础网络架构,所述车辆重识别模型训练使用的总损失函数losstotal满足:
14、losstotal=α*lce+β*lt+γ*lc
15、式中,lce表示交叉熵损失,α为交叉熵损失的权重;lt表示三元组损失,β为三元组损失的权重;lc表示中心损失,γ为中心损失的权重;其中α+β+γ=1。
16、相对于现有技术,本发明提供的停车引导系统通过引入车辆重识别模型对停车场内摄像头拍摄的车辆图片进行车辆身份的预测,并基于该车辆预测身份与车辆编码身份进行匹配,获得与车辆编码身份对应的车辆在停车场的行进路线和当前时刻的位置,基于停车场现有的pvd车位检测模块获取车辆当前时刻位置所属区域的空车位信息,进而向车辆用户端发送当前停车行进路径规划的方式,可有效解决现有大型停车场在车位剩余量不足的情况下,无法准确把待停车辆引导到就近的空车位上,导致车主寻找空车位时间过长、盲目寻找的问题。该系统提高车主寻找车位的效率,提高车主的停车体验,提高了停车位的有效利用率。同时,该系统可避免车主在长时间寻找停车位的过程中车辆排放较多的尾气,降低停车场的净化空气的运维成本。
17、同时,本发明还提供一种基于车辆重识别技术的停车引导方法,包括以下步骤:
18、s10获取进场车辆的进场图像,并基于该进场图像向进场车辆分配车辆编码身份,并获取进场所属区域的空车位信息,并向该车辆编码身份对应用户端发送进场停车行进路径规划;
19、s20实时获取进场车辆在停车场的经过图像,并采用车辆重识别技术对经过图像进行特征提取,预测所述经过图像对应的车辆预测身份;
20、s30根据车辆预测身份确定与其对应的车辆编码身份,进而获得该车辆编码身份的当前位置信息;并基于当前位置信息获取当前位置所属区域的空车位信息;并基于当前位置信息和当前位置所属区域的空车位信息生成并发送当前时刻停车行进路径规划。
21、进一步地,所述步骤s30包括以下子步骤:
22、s31:根据输入的车辆预测身份和车辆编码身份进行相似性匹配计算,确定车辆预测身份对应的车辆编码身份;
23、s32:根据车辆编码身份对应的车辆预测身份获取该车辆预测身份对应的经过图像集及其对应的拍摄时间[t1,t2,...,ti,...,tn]和所属摄像的位置区域[s1,s2,...,si,...,sn],获得车辆编码身份的行径路线和所在停车场的当前位置信息;
24、s33:根据当前位置信息向pvd车位检测模块发起获取当前位置所属区域的空车位信息的数据请求,并获取当前位置所属区域的空车位信息;
25、s34:基于车辆编码身份的当前位置信息和当前位置所属区域的空车位信息生成当前时刻停车行进路径规划;
26、s35:将当前时刻停车行进路径规划发送给车辆编码身份对应的车主的用户端。
27、进一步地,所述车辆重识别技术使用的预训练的车辆重识别模型的总损失函数losstotal满足:
28、losstotal=α*lce+β*lt+γ*lc
29、式中,lce表示交叉熵损失,α为交叉熵损失的权重;lt表示三元组损失,β为三元组损失的权重;lc表示中心损失,γ为中心损失的权重;其中α+β+γ=1。
30、相对于现有技术,本发明提供的停车引导方法的有益效果与上述停车引导系统相同,不在此赘述。
31、为了更好地理解和实施,下面结合附图详细说明本发明。
技术特征:1.一种基于车辆重识别技术的停车引导系统,包括:
2.根据权利要求1所述的停车引导系统,其特征在于,所述车辆引导模块包括:
3.根据权利要求1或2所述的停车引导系统,其特征在于,所述车辆重识别模型的框架由深度学习模型中的卷积神经网络cnn或图神经网络gnn或注意力机制transformer作为基础网络架构。
4.根据权利要求3所述的停车引导系统,其特征在于,所述车辆重识别模型训练使用的总损失函数losstotal满足:
5.根据权利要求1或2或4所述的停车引导系统,其特征在于,还包括一用户终端,所述用户终端通过公众号、小程序或app等方式接收当前时刻停车行进路径规划,并基于车辆重识别模型生成的位置以室内导航的方式把车引导到停车区域。
6.一种基于车辆重识别技术的停车引导方法,包括以下步骤:
7.根据权利要求6所述的停车引导方法,其特征在于,所述步骤s30包括以下子步骤:
8.根据权利要求6或7所述的停车引导方法,其特征在于,所述车辆重识别技术使用的预训练的车辆重识别模型的总损失函数losstotal满足:
9.一种电子设备,包括:存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求6至8任一项所述的基于车辆重识别技术的停车引导方法。
10.一种计算机可读存储介质,存储有计算机可执行指令,其特征在于,所述计算机可执行指令用于执行权利要求6至8任一项所述的基于车辆重识别技术的停车引导方法。
技术总结本发明涉及基于车辆重识别技术的停车引导系统,本发明的停车引导系统,通过引入车辆重识别模型对停车场内摄像头拍摄的车辆图片进行车辆身份预测,获得与车辆预测身份匹配的车辆编码身份对应车辆在停车场的行进路线和当前时刻的位置,基于停车场现有的PVD车位检测模块获取车辆当前位置所属区域的空车位信息,进而向车辆用户端发送当前停车行进路径规划,可有效解决现有大型停车场在车位剩余量不足的情况下,无法准确把待停车辆引导到就近的空车位上的问题。该方法提高车主寻找车位的效率及停车体验,提高了停车位的有效利用率。同时,该方法可避免车主在长时间寻找停车位的过程中车辆排放较多的尾气,降低停车场的净化空气的运维成本。技术研发人员:焦新涛,莫钊贤,王汉隆,陈剑声受保护的技术使用者:华南师范大学技术研发日:技术公布日:2024/9/2本文地址:https://www.jishuxx.com/zhuanli/20240905/286258.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表