一种滚筒式多目标红花地形自适应统收机器人及控制方法
- 国知局
- 2024-09-05 15:03:31
本发明涉及农业机械,具体涉及一种滚筒式多目标红花地形自适应统收机器人及控制方法。
背景技术:
1、红花作为一种重要的药用和天然染料作物,具有丰富的药用和经济价值。现有红花采摘装置在多目标同时采收、信息感知速度、红花丝的统一采收处理和装置地形自适应等方面存在一些弊端。现有红花采摘装置在多目标同时采收方面的弊端主要在于它们通常只能针对单一目标进行采收作业,缺乏同步协调,无法对复杂地况做相应处理,影响作业的准确性。另外,在处理红花丝时,缺乏自动调整作业参数的能力,增加了人工干预的需求。在红花统收处理方面,现有装置的效率不高,导致后续处理工作繁琐。虽然目前在自动化采摘技术上取得突破,但在快速作业时难以避免对红花花丝的损伤,机器人对不同密度红花植株的适应性较低,会影响其在不均匀植株密度田间的作业效率。另外,目前红花采摘装置在复杂地形适应性方面存在局限,不能保证在不平坦地面的稳定性和采摘效果。此外,若多个采摘机械手单体的同步控制不精确,会降低作业效率。已经公开的夹网组合式采摘机制虽具创新性,但在智能化决策支持上存在不足,如缺乏自动调整采摘力度和角度的功能,会对不同成熟度的植株造成伤害。
2、因此,现有的红花采摘机器人在自动化采摘方面缺乏对不同环境和植株条件的适应性、花丝完整度低,使得采收效率低、采摘质量受限、不适应复杂地形。
技术实现思路
1、发明目的:本发明目的是提供一种采收效率高、花丝完整度高、地形自适应的滚筒式多目标红花地形自适应统收机器人及控制方法。
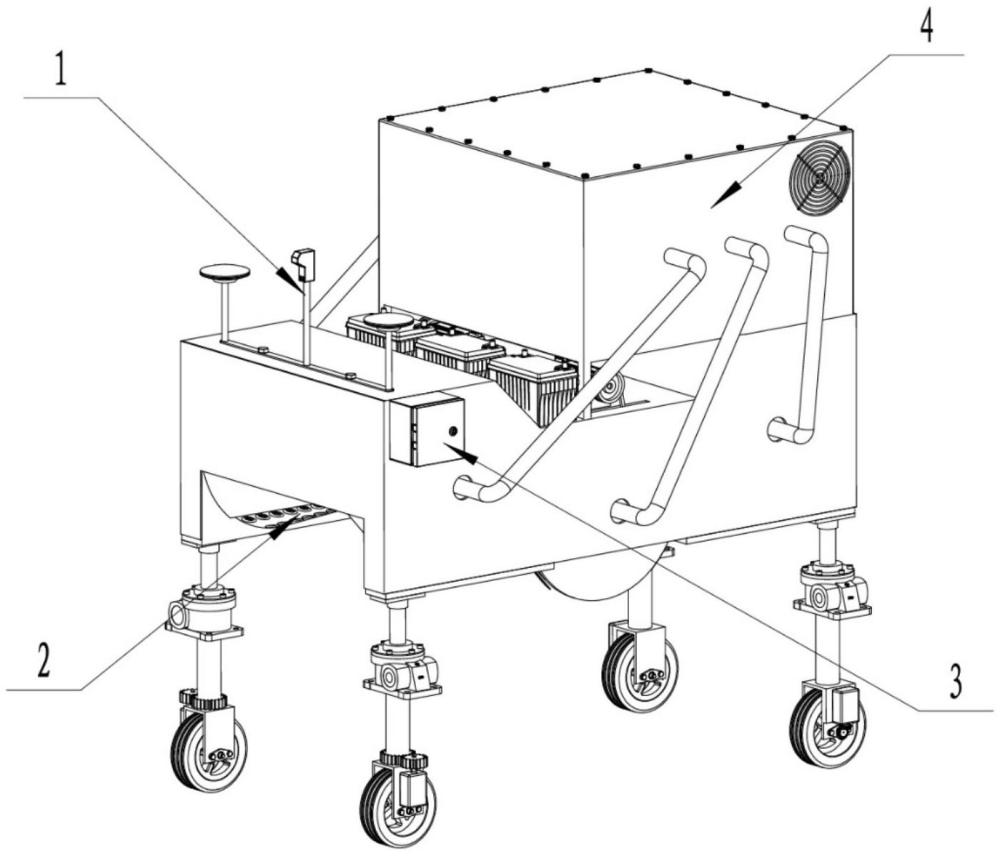
2、技术方案:本发明所述的滚筒式多目标红花地形自适应统收机器人,包括壳体、传感机构、驱动机构、控制机构、收集机构、固定于壳体底部的采摘机构、行走机构;所述采摘机构包括采摘筒、位于采摘筒内部的切刀组件及多个穿孔组件,所述穿孔组件固定于采摘筒外壁;其中,所述穿孔组件包括自外向内逐个向下嵌套的果球定位辅助曲面、果球定位孔、花丝缩颈定位孔、花丝封圈,沿所述花丝封圈内壁面周向向内向心延伸出多个薄片,多个薄片的前端汇聚于花丝封圈中央并围成中心孔,相邻薄片之间形成间隙;所述切刀组件包括刀柄与切割刀,所述刀柄靠近采摘筒的一侧固定有切割刀,且所述切割刀贴合于所述采摘筒内壁;
3、所述采摘机构两端分别设有第一密封板及第二密封板,所述第一密封板与第二密封板中心开有收集孔,所述收集机构通过所述收集孔与采摘机构连通,为采摘机构提供负压环境;若干刀柄、采摘筒内壁、第一密封板及第二密封板形成密封腔室;
4、所述驱动机构用以驱动采摘筒与切刀组件不同步转动。
5、进一步的,所述采摘筒外壁分布若干装配孔,所述穿孔组件通过所述装配孔与采摘筒固定;且所述装配孔的分布根据红花果球在红花植株上的位置设置。
6、进一步的,所述花丝封圈的薄片为三角形橡胶,所述中心孔直径按照花丝缩颈直径确定,果球定位孔直径按照红花果球直径确定,花丝缩颈定位孔直径按照红花植株花丝缩颈直径确定。
7、进一步的,所述采摘筒包括以所述采摘筒中纵剖面为对称面对称的第一采摘筒和第二采摘筒;所述第一采摘筒为漏斗状筒型结构,且直径自采摘筒中央向外逐渐增大。
8、进一步的,所述采摘筒设有多个,相互之间平行分布且在高度延伸方向上呈锯齿状排布。
9、进一步的,采摘机构还包括半包围结构的包络筒,包络筒形状配适于所述采摘筒且固定于所述采摘筒外侧,并在侧壁开有采摘口对准目标红花植株,采摘筒转动时,采摘筒的穿孔组件依次经过所述采摘口;
10、在相邻包络筒之间设置过渡板与包络筒外壁相切。
11、进一步的,所述采摘筒一端固定有第一密封板,另一端嵌入第二密封板;所述切刀组件在第二密封板内侧面沿半径方向周向延伸出多个刀柄至第一密封板内侧;
12、所述切刀组件还包括与采摘筒同心同轴的分隔片,此时所述刀柄包括第一刀柄和第二刀柄,自第二密封板延伸出第二刀柄与分隔片一侧固定,自分隔片另一侧延伸出第一刀柄至第一密封板内侧;所述分隔片将所述密封腔室分隔为第一密封腔室、第二密封腔室。
13、进一步的,所述采摘机构还包括空心轴,所述空心轴设于若干刀柄中央,内部中空且两端与收集孔连通,并于侧壁开有槽口,槽口对准目标红花植株;
14、所述分隔片为环状,穿过所述空心轴,且外壁贴合采摘筒内壁、内壁贴合于空心轴中央。
15、本发明所述的滚筒式多目标红花地形自适应统收机器人的控制方法,包括:由所述传感机构实时获取前方路况及目标红花植株信息;到达目标红花植株时,调节机器人的高度使采摘筒达到最佳采摘位置;
16、驱动采摘筒带动穿孔组件转动进而将目标红花果球固定,基于负压环境将目标红花果球的花丝吸入所述中心孔,由所述驱动机构驱动采摘筒与切刀组件不同步转动,使所述切割刀切割花丝并存储于密封腔室;所述收集机构收集花丝。
17、进一步的,通过调整所述行走机构的高度达到最佳采摘位置;所述控制机构将目标红花植株从高度延伸方向上划分为第一采摘区、过渡区和第二采摘区,使采摘筒外壁完全覆盖第一采摘区和第二采摘区即达到所述最佳采摘位置。
18、有益效果:本发明具有如下显著效果:1、采收效率高:本发明基于对红花植株花丝和果球自然分布特征,进一步优化和改进快速多目标分区采摘、不同植株密度适应性,提出一种滚筒仿形式多目标红花地形自适应统收机器人;其中,采摘机构的采摘筒仿照伞状红花花冠分布的结构设计,同时在采摘筒外壁通过装配孔安装穿孔组件,采摘筒设计呈沙漏形状,并形成对称的第一采摘筒和第二采摘筒,锥度角以伞状红花果球散开角度为标准设置,能够有效模拟伞状红花冠层的自然生长形态,使得采摘筒可以覆盖红花冠层,提高采摘效率和准确性,实现对红花植株的全面采收;当采用多个采摘筒时,呈锯齿状排列安装于壳体上,实现了目标红花植株的高低差额分区采摘,根据红花果球的高度差异,进行高效的分区域采收,例如采用三个采摘筒时,考虑到红花植株中高位果球数量通常超过低位果球,呈v字型排布设置有针对高位果球的采摘筒c1和c3,便于进行二次采摘,降低漏采率,提升整体采收效率;本发明还设置了高效连续切割与花丝收集系统,采用切刀组件和空心轴,不仅保证了红花花丝的连续且均匀切割,加快了采收速度,还通过设有花丝收集槽口的空心轴,有效地聚集和传输切割后的花丝,将其输送至花丝贮存箱中,该设计避免了花丝在切割过程中的散落;综上,本发明根据伞状红花果球分布规律,对红花植株在竖直方向分区采摘,基于高低差位采收方式,实现了智能感知、多目标统收,快速采摘收集,提高了红花采收效率;2、花丝完整度高:本发明装配孔在采摘筒外壁上的分布设计针对不同品种和不同盛开期的红花,针对性更换不同尺寸、比例的穿孔组件,确保了采摘过程的高适用性和果实的完好率;另外,本发明的穿孔组件完全依照红花植株上果球、花丝的分布结构,设置了自外向内逐个向下嵌套的果球定位辅助曲面、果球定位孔、花丝缩颈定位孔、花丝封圈,沿花丝封圈周向向内紧密延伸出多个薄片,汇聚于花丝封圈中央,且在中央围成中心孔,在内部负压环境下,便于快速定位目标植株的目标果球与目标花丝,并将目标花丝吸入采摘筒内部并固定而不损坏花丝,便于后续的切割采摘,保证了花丝的完整性;3、地形自适应:本发明针对复杂地形稳定性好,具备地形自适应功能,配备的多个高度可调的行走机构可转向可前进后退,使得机器人能够在多变的地形条件下稳定作业,通过独立控制行走机构,机器人可以根据地面的不平整自动调整其姿态,保持与红花植株的最佳接触角度和压力,使采摘筒达到最佳采摘位置,从而提升稳定性与采收效率,综上,能够适应不同高度的红花植株以及各种不平坦的田间条件,扩大了机器人使用范围。
本文地址:https://www.jishuxx.com/zhuanli/20240905/289275.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表