一种基于机器视觉的果树剪枝装置
- 国知局
- 2024-09-05 15:01:37
本申请涉及农业设备,具体而言,涉及一种基于机器视觉的果树剪枝装置。
背景技术:
1、蓝莓是杜鹃花科越橘属植物,其果实富含花青素、黄酮、维生素等功能成分,具有提高机体免疫力、延缓神经衰老、保护视力、增强心脏功能、预防心血管疾病和抗肿瘤等功效,除了鲜食还可以用来加工成果酱、果酒、饮料等产品。“夏普蓝”属于南高丛蓝莓品种,其植株为多年生常绿灌木,在南方地区其生长势较强,由于‘夏普蓝’需冷量较低,仅为200h,故特别适合在温室内盆栽。温室盆栽存在着树体生长紊乱、枝条郁闭、通风透光差、内膛枝细弱、新梢二次开花结果等问题,严重影响翌年的产量和品质。合理的修剪技术对于培养果树树形、促进其生长势、提高果实产量与果品质量均有重要意义。
2、整形修剪是果树栽培中最重要的管理技术,可以改善树体与环境的关系。利用科学的修剪技术调节植物器官形成的数量和质量,调控养分的吸收、运转和分配,从而达到调节果树生长与结果的关系,最终达到优质丰产的目的。夏季是植物快速生长的季节,如果任其生长,必定会造成枝条过密,树冠郁闭,最终影响其营养生长。因此,在生产上增加夏季修剪环节,可以构建其合理的叶幕层,促进其花芽分化和养分的有效积累。
3、不修剪和轻度修剪均造成了果树的郁闭,致使其通风透光性差,从而抑制了新枝的萌发和植株的正常生长发育;重度修剪破坏了植株正常的叶幕,使得植株在短时间内受到了伤害,导致其生理活性异常,光合利用率低,生长受到抑制;适度修剪能改善树体内部的光照条件,形成良好的叶幕结构,叶片的自我修复能力及其生理活性均较强,可促进植株生长和花芽分化,最终提高蓝莓果实的产量和质量。
4、综上所述,需要设计一种基于机器视觉的果树剪枝装置来修剪果树枝条,使得果实产量增加到最大的产量。
技术实现思路
1、本申请实施例的目的在于提供一种基于机器视觉的果树剪枝装置,其能够对果树枝条进行修剪,使得果实产量增加到最大的产量。
2、本申请具体提供了一种基于机器视觉的果树剪枝装置,包括:
3、移动单元,包括壳体和底盘,所述底盘设于所述壳体的下部,所述壳体的两侧设置履带,所述移动单元通过履带进行移动;
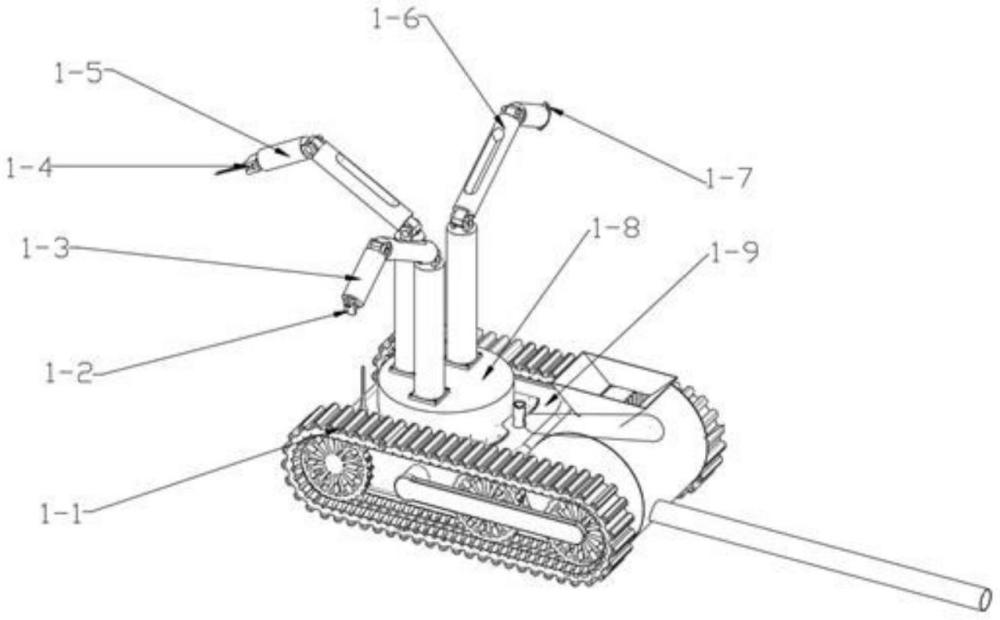
4、机械臂单元,设于所述移动单元的上部,所述机械臂单元包括第一机械臂、第二机械臂、第三机械臂;在所述第一机械部的末端设置摄像头,用于采集图像信息并输出;在所述第二机械臂的末端设置剪切部,所述剪切部用于对果树进行剪枝;所述第三机械臂的末端设置夹持部,所述夹持部用于夹持果树的树枝,在所述第二机械臂完成修剪后,将剪掉的枝条输送至预定位置处;
5、控制单元,所述控制单元分别与所述移动单元、所述机械臂单元通信连接;所述控制单元包括图像处理模块,所述图像处理模块用于接收所述第一机械臂的图像信息,并根据图像信息确定移动路径后发出第一信号至所述移动单元,控制所述移动单元沿预定路径移动至预定位置处;或者根据图像信息确定待剪枝条后发出第二信号至所述第二机械臂,控制所述第二机械臂进行剪枝。
6、在一种可实施的方式中,还包括粉碎单元,所述粉碎单元用于将收集的枝条粉碎,再通过传输管道将粉碎的木屑排出;所述粉碎单元包括设于壳体内的粉碎箱和设于所述粉碎箱内的粉碎机芯;所述粉碎箱顶部开口,第三个机械臂将剪掉的树枝放入粉碎箱,粉碎机芯通过转动对枝条进行粉碎。
7、在一种可实施的方式中,所述粉碎机芯的轴向两端设置连接轴,所述连接轴与电机传动连接,通过电机控制所述粉碎机芯的转动。
8、在一种可实施的方式中,所述粉碎箱的底部设置输出管道,所述输出管道用于将粉碎后的木屑排出。
9、在一种可实施的方式中,所述夹持部包括夹杆和夹片,通过控制夹杆的开合角度,对不同的枝条进行夹持固定,所述夹持部还包括第三连接接口,第三连接接口用于与第三连接臂可拆卸固定连接。
10、在一种可实施的方式中,第一机械臂的末端与摄像头可拆卸连接,所述摄像头通过连接座与第一机械臂可拆卸固定连接,所述连接座与所述摄像头铰接。
11、在一种可实施的方式中,第一机械臂、第二机械臂或者第三机械臂均通过转台与移动单元上表面连接。
12、在一种可实施的方式中,第一机械臂、第二机械臂或者第三机械臂均为多自由度机械臂,多自由度机械臂至少包括:上四连杆和下四连杆,下四连杆的一端与转台连接,下四连杆与上四连杆通过下连接座铰接在下连接座上设置举升油缸;上四连杆的顶部与伸缩臂之间通过上连接座铰接,在上四连杆与伸缩臂之间通过变幅油缸控制连接;所述伸缩臂上设置伸缩油缸,所述伸缩油缸用于调节所述伸缩臂的伸出长度;在伸缩臂的自由端通过折臂支座与折臂铰接,所述折臂通过调平油缸控制与所述伸缩臂之间的夹角;所述折臂包括多个连接杆,多个连接杆首尾依次铰接,通过折臂油缸控制多个连接杆的折叠和伸展;所述折臂的自由端设置第二连接头,所述第二连接头用于分别与摄像机、剪切部或者夹持部可拆卸连接。
13、在一种可实施的方式中,所述控制单元根据图像信息确定移动路径至少包括以下内容:
14、s1、确定起点的位置和终点的位置;
15、s2、设置第一随机点,基于第一随机点和起点确定步长;
16、s3、连接起点和第一随机点获取第一路径,基于所述图像信息获取作物位置,判断作物是否在第一路径上;
17、s4、在作物不在第一路径上时,则沿第一路径所在方向,以步长为移动距离进行移动,获取第一位置点;
18、s5、以第一位置点为起始,以步长的两倍为长度,生成第二随机点,连接第一位置点和第二随机点获取第二路径,并判断作物是否在第二路径上;
19、在作物不在第二路径上时,则沿第二路径所在方向,以步长为移动距离进行移动,获取第二位置点;
20、s6、重复步骤s4至步骤s5,确定多个位置点,直至到达终点n的位置处,从起点经多个位置点到达终点的路径为移动路径。
21、在一种可实施的方式中,所述控制单元内生成多条完整路径,比对多条完整路径的总长度,以长度最短的路径为移动单元的移动路径,并发出第一信号至所述移动单元,控制所述移动单元沿预定的移动路径进行移动。
22、与现有技术相比,本申请的有益效果为:
23、在本申请的技术方案中,通过移动单元的设置,适应不同的地形条件。通过机械臂单元的设置,在第一机械部的末端设置摄像头,用于采集图像信息并输出;在第二机械臂的末端设置剪切部,剪切部用于对果树进行剪枝;第三机械臂的末端设置夹持部,夹持部用于夹持果树的树枝,在第二机械臂完成修剪后,将剪掉的枝条输送至预定位置处;通过控制单元的设置,能够控制移动单元沿预定路径进行移动,还能基于图像信息控制剪切部对指定枝条进行剪切,保证果树产量;并且控制单元还能根据图像信息确定移动单元的移动路径。
技术特征:1.一种基于机器视觉的果树剪枝装置,其特征在于,包括:
2.根据权利要求1所述的基于机器视觉的果树剪枝装置,其特征在于,还包括粉碎单元,所述粉碎单元用于将收集的枝条粉碎,再通过传输管道将粉碎的木屑排出;所述粉碎单元包括设于壳体内的粉碎箱和设于所述粉碎箱内的粉碎机芯;所述粉碎箱顶部开口,第三个机械臂将剪掉的树枝放入粉碎箱,粉碎机芯通过转动对枝条进行粉碎。
3.根据权利要求2所述的基于机器视觉的果树剪枝装置,其特征在于,所述粉碎机芯的轴向两端设置连接轴,所述连接轴与电机传动连接,通过电机控制所述粉碎机芯的转动。
4.根据权利要求3所述的基于机器视觉的果树剪枝装置,其特征在于,所述粉碎箱的底部设置输出管道,所述输出管道用于将粉碎后的木屑排出。
5.根据权利要求1所述的基于机器视觉的果树剪枝装置,其特征在于,所述夹持部包括夹杆和夹片,通过控制夹杆的开合角度,对不同的枝条进行夹持固定,所述夹持部还包括第三连接接口,第三连接接口用于与第三连接臂可拆卸固定连接。
6.根据权利要求1所述的基于机器视觉的果树剪枝装置,其特征在于,第一机械臂的末端与摄像头可拆卸连接,所述摄像头通过连接座与第一机械臂可拆卸固定连接,所述连接座与所述摄像头铰接。
7.根据权利要求1所述的基于机器视觉的果树剪枝装置,其特征在于,第一机械臂、第二机械臂或者第三机械臂均通过转台与移动单元上表面连接。
8.根据权利要求7所述的基于机器视觉的果树剪枝装置,其特征在于,第一机械臂、第二机械臂或者第三机械臂均为多自由度机械臂,多自由度机械臂至少包括:上四连杆和下四连杆,下四连杆的一端与转台连接,下四连杆与上四连杆通过下连接座铰接在下连接座上设置举升油缸;上四连杆的顶部与伸缩臂之间通过上连接座铰接,在上四连杆与伸缩臂之间通过变幅油缸控制连接;所述伸缩臂上设置伸缩油缸,所述伸缩油缸用于调节所述伸缩臂的伸出长度;在伸缩臂的自由端通过折臂支座与折臂铰接,所述折臂通过调平油缸控制与所述伸缩臂之间的夹角;所述折臂包括多个连接杆,多个连接杆首尾依次铰接,通过折臂油缸控制多个连接杆的折叠和伸展;所述折臂的自由端设置第二连接头,所述第二连接头用于分别与摄像机、剪切部或者夹持部可拆卸连接。
9.根据权利要求1所述的基于机器视觉的果树剪枝装置,其特征在于,所述控制单元根据图像信息确定移动路径至少包括以下内容:
10.根据权利要求9所述的基于机器视觉的果树剪枝装置,其特征在于,所述控制单元内生成多条完整路径,比对多条完整路径的总长度,以长度最短的路径为移动单元的移动路径,并发出第一信号至所述移动单元,控制所述移动单元沿预定的移动路径进行移动。
技术总结本申请提供一种基于机器视觉的果树剪枝装置,包括移动单元、机械臂单元和控制单元。机械臂单元设于移动单元的上部,机械臂单元包括第一机械臂、第二机械臂、第三机械臂;在第一机械部的末端设置摄像头,用于采集图像信息并输出;在第二机械臂的末端设置剪切部,剪切部用于对果树进行剪枝;第三机械臂的末端设置夹持部,夹持部用于夹持果树的树枝,在第二机械臂完成修剪后,将剪掉的枝条输送至预定位置处;控制单元控制所述移动单元沿预定路径移动至预定位置处;或者根据图像信息确定待剪枝条后发出第二信号至第二机械臂,控制第二机械臂进行剪枝。技术研发人员:李娜,顾晨光,喻黎明,蒋有源,王艳青,阮鑫瑞受保护的技术使用者:昆明理工大学技术研发日:技术公布日:2024/9/2本文地址:https://www.jishuxx.com/zhuanli/20240905/289059.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表