工程机械的控制装置及具备该控制装置的工程机械
- 国知局
- 2024-09-05 15:06:10
本发明涉及工程机械的控制装置及具备该控制装置的工程机械。
背景技术:
1、以往,作为工程机械,已知有包括机体、和可起伏地被支撑于所述机体的作业附属装置的液压挖掘机。液压挖掘机的作业附属装置包含可起伏地被支撑于机体的动臂、可转动地被支撑于所述动臂的斗杆、以及可转动地被支撑于所述斗杆的铲斗,上述动臂、斗杆及铲斗通过可伸缩的液压工作缸而动作。此种液压挖掘机有时使用铲斗的远端部,对地面进行整地作业。该整地作业包含平整作业、底部打磨作业(bottom smoothingwork)、坡面成形作业等。在此种整地作业中,由操作员对作业附属装置的起伏进行操作来调整对于地面的按压力(压紧力)的作业,对于不熟练者而言并不容易。
2、在专利文献1中公开了如下技术,即,检测作业附属装置的姿势及负荷,根据检测出的信息,求出铲斗对于地面的按压力,并以使该按压力与目标值一致的方式,自动控制动臂工作缸的伸缩。
3、现有技术文献
4、专利文献
5、专利文献1:日本专利公开公报特开平10-219727号
6、在专利文献1所记载的技术中,因为根据液压工作缸的压力来推断上述按压力,所以有如下问题,即,按压力容易受到由地面的凹凸引起的压力变动、或由土质引起的反作用力等的影响而变动,难以通过液压工作缸的伸缩将该按压力控制为一定。
技术实现思路
1、本发明的目的在于提供可一边稳定地维持对于地面的按压力,一边进行整地作业的工程机械的控制装置及具备该控制装置的工程机械。
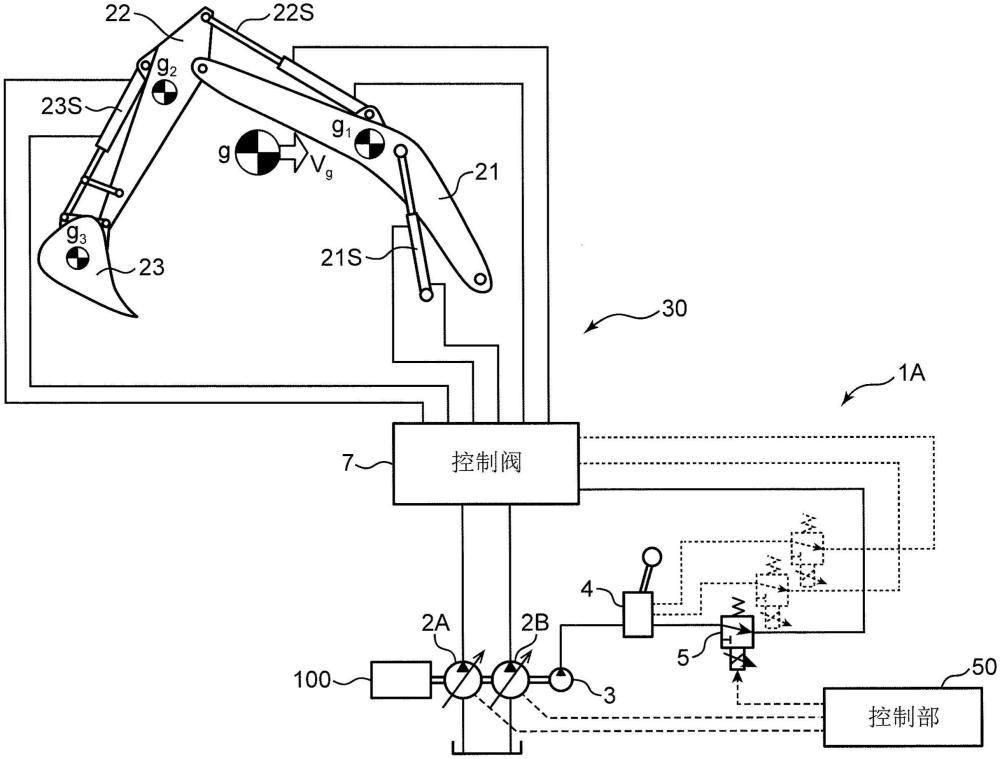
2、本发明所提供的是工程机械的控制装置。所述工程机械包括机体和作业装置,该作业装置包含可彼此相对移动的多个构件,且可起伏地被支撑于所述机体。所述控制装置包括操作指令受理部、驱动部、姿势信息取得部及控制部。所述驱动部以与用于使所述作业装置动作的指令信号对应的速度,使所述作业装置动作。所述姿势信息取得部取得所述作业装置相对于所述机体的相对姿势信息。所述控制部将所述指令信号输入至所述驱动部。所述控制部基于所述姿势信息,运算所述多个构件的合成重心的速度即重心速度,另一方面,基于所述作业装置对地面所做的功即对地功与该对地功的目标值即目标对地功之差,运算所述重心速度的目标值即目标重心速度,将用于使所述重心速度接近所述目标重心速度的反馈修正施加至所述指令信号,并输入至所述驱动部。
3、本发明所提供的是工程机械,其包括机体、可起伏地被支撑于所述机体的作业装置、以及上述记载的工程机械的控制装置。
技术特征:1.一种工程机械的控制装置,所述工程机械包括机体和作业装置,所述作业装置包含可彼此相对移动的多个构件,且可起伏地被支撑于所述机体,所述工程机械的控制装置的特征在于包括:
2.根据权利要求1所述工程机械的控制装置,其特征在于还包括:
3.根据权利要求2所述工程机械的控制装置,其特征在于,
4.根据权利要求1至3中任一项所述工程机械的控制装置,其特征在于还包括:
5.根据权利要求1至3中任一项所述工程机械的控制装置,其特征在于,
6.根据权利要求5所述工程机械的控制装置,其特征在于,
7.根据权利要求1至6中任一项所述工程机械的控制装置,其特征在于,
8.一种工程机械,其特征在于包括:
技术总结控制装置(1A)包括驱动部(21S、5)、姿势信息取得部(31)及控制部(50)。控制部(50)基于姿势信息取得部(31)所检测的作业装置(20)的姿势信息,运算作业装置(20)的重心速度,另一方面,基于作业装置(20)对地面所做的对地功与目标对地功之差,运算所述重心速度的目标值即目标重心速度,并将以使所述重心速度接近所述目标重心速度的方式被施加了反馈修正的指令信号输入至驱动部(21S、5)。技术研发人员:洪水雅俊,山本透,吉原秀雄,小岩井一茂受保护的技术使用者:国立大学法人广岛大学技术研发日:技术公布日:2024/9/2本文地址:https://www.jishuxx.com/zhuanli/20240905/289591.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表