一种基于陆基工厂化水产养殖的智能投饵装备
- 国知局
- 2024-09-11 14:29:48
本发明涉及水产养殖,具体为一种基于陆基工厂化水产养殖的智能投饵装备。
背景技术:
1、水产养殖领域中,投饵作为养殖操作的关键步骤,至关重要,目前,我国大多数养殖场仍依赖于人工方式进行饲料投放,这种方法存在诸多弊端,包括投喂效率的低下、饲料分配的不均匀、高饲料碎裂率,进而导致了饵料的浪费以及对水体环境的污染,为促进生产效率的提升和养殖规模的扩张,养殖业的饲料投喂方法已从传统的人工手动方式,逐步过渡到使用自动投饵机进行饲料投放。投饵机通过定时定量投饵,显著降低了人力成本。
2、然而,由于投饵机缺乏对养殖环境和鱼群行为的实时监控能力,并且无法依据即时环境变化调整喂食计划以实现最佳喂养效果,过度喂食不但造成饲料的浪费,也会提高成本与收益的比例,剩余饲料的积累还可能导致水质恶化和富营养化,不足的喂食量会延迟鱼的成长,造成鱼群体型不均,有时还可能激发群体内的攻击性行为。
3、于是,有鉴于此,针对现有的结构及缺失予以研究改良,提出一种基于陆基工厂化水产养殖的智能投饵装备。
技术实现思路
1、针对现有技术的不足,本发明提供了一种基于陆基工厂化水产养殖的智能投饵装备,解决了上述背景技术中提出的问题。
2、为实现以上目的,本发明通过以下技术方案予以实现:一种基于陆基工厂化水产养殖的智能投饵装备,包括以下步骤:
3、步骤一:采集不同摄食状态的水面压强数据,利用微型电脑处理压强数据并提取压强信号特征,用于机器学习模型分类摄食强度等级,其中,压强信号特征为标准差、均值能量、差值、峰值数和样本熵;
4、步骤二:摄食强度等级分为“强”、“弱”和“无”;
5、步骤三:对水面剩余饵料进行目标识别,摄食等级判断为“弱”,则进行饵料目标识别,识别到块状饵料则结束投饵;
6、步骤四:控制数据采集装置中的第一电推杆、第二电推杆和步进电机,将压强传感器和ccd摄像头运输至工作位置;
7、所述步骤一具体分为以下步骤:
8、压强传感器与微处理器串口连接,采集压强数据的距离间隔为0.3秒,每轮记录时长为1分钟,每轮数据实际采集179个数据点,设为一轮压强测量值,其中n是测量值的总数,则n=179;
9、标准差计算公式:,表示压强数据中的第个测量值;,是所有测量值的平均值;
10、均值能量的计算公式:,179为每分钟测量的压强数据个数;
11、压强差值计算公式:,是一轮测量中压强最大值;是一轮测量中压强最小值;
12、峰值数计算公式:,设置峰值高度的阈值为;
13、样本熵计算流程如下:
14、定义滞后参数m,用于对比水体压强信号的向量长度;定义相似度r,设为原始数据标准差的0.2倍;
15、构建长度为m的向量序列,对于;
16、对于每个,计算与所有的最大点对点距离,其中并计数满足以下条件的的数量:,这个计数称为;
17、计算的总和并除以得到平均值:
18、重复步骤三、步骤四,构造长度为的向量序列,并计算;
19、则该轮水体压强信号的样本熵为:
20、构建压强信号特征数据集,并给不同的摄食强度等级打上对应标签,利用随机森林集成学习模型对数据集进行训练,选择最优的参数组合为:在模型中集成47棵树来进行最终的预测;定义每颗树的最大深度为8旨在防止过拟合;
21、所述步骤二中,设置每轮压强测量时间为1分钟,首轮投饵500g饵料后,摄食强度等级为“强”,则再投入300g的饲料;摄食强度等级为“弱”,则进行步骤三判断是否投入150g的饲料;摄食强度等级为“无”,则不再投入饲料;
22、所述步骤三中,采集水面剩余饵料图像数据,制作剩余饵料图像数据集,并对图像中块状饵料进行标注,利用yolov5模型进行训练,得到剩余饵料目标检测最优权重,压强数据判断摄食等级为“弱”,则启用水面剩余饵料目标检测,无识别对象且摄食等级为“弱”,则按照对应步骤二中的决策投饵;有识别对象且摄食等级为“弱”,则不再投入饵料;
23、所述步骤四中,控制第一电推杆、第二电推杆的直流电机正反接,实现工作和复位;利用步进电机驱动滚珠丝杆导轨,实现压强传感器和ccd摄像头的垂直升降;
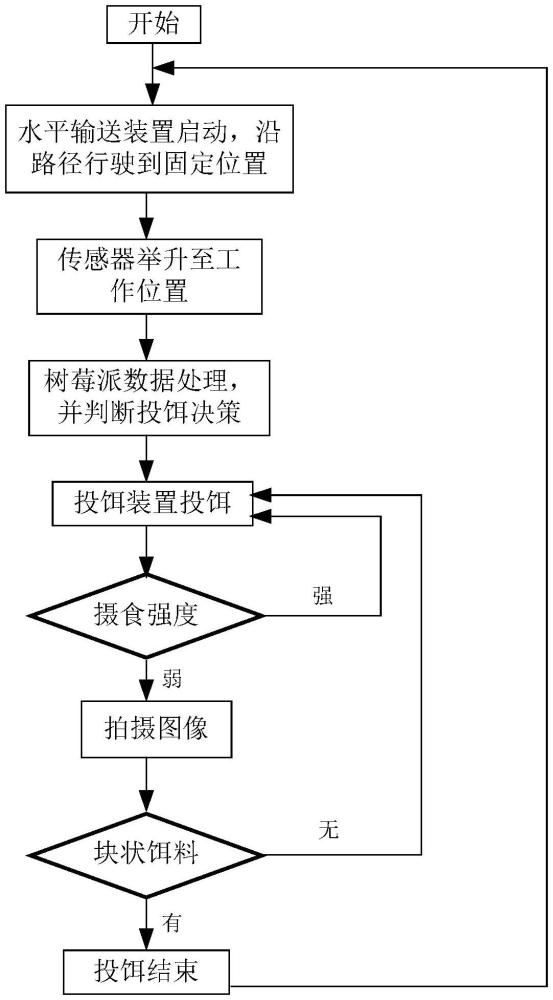
24、步骤五:基于上述运行逻辑,通过移动投饵装置和数据采集作业的相互配合实现投饵工作,首先,移动投饵装置沿规划路径行进到指定的圈养桶,步进电机驱动滚珠丝杆导轨正转以举升托举平台,然后控制第二电推杆将压强传感器向水面输送,而第一电推杆举升ccd摄像头到达预设高度,ccd摄像头、压强传感器将监测的数据传输至微型电脑,先将数据进行清洗置于机器学习模型中以获得投饵决策,根据投饵决策进行精准投饵,投饵时储料仓内部饵料通过星型下料器精准出料后将饵料投入至输料管内部,然后通过送料风机作为动力源将输料管内部的饵料排出至圈养桶内,投饵结束后压强传感器复位,而步进电机反转复位,该桶投饵结束。
25、进一步的,所述基于陆基工厂化水产养殖的智能投饵装备包括数据采集装置,所述数据采集装置包括ccd摄像头、第一电推杆、第二电推杆、压强传感器、步进电机和滚珠丝杆导轨,所述滚珠丝杆导轨的顶部固定有步进电机,且滚珠丝杆导轨的表面通过滑块连接有托举平台,所述托举平台的表面分别设置有第一电推杆、第二电推杆,且第一电推杆的顶部连接有ccd摄像头,所述第二电推杆的端部连接有压强传感器。
26、进一步的,所述滚珠丝杆导轨的底部设置有投饵小车壳体,且投饵小车壳体的表面于滚珠丝杆导轨一侧设置有储料仓,所述储料仓的底部连接有星型下料器,且星型下料器底部连接有输料管。
27、进一步的,所述输料管底部一侧设置有送料风机,所述投饵小车壳体的底部连接有四轮底盘,所述投饵小车壳体的表面还设置有微型电脑控制箱。
28、进一步的,所述输料管的顶端两侧设置有支架杆,且支架杆的底端通过转轴连接有出料管。
29、进一步的,所述出料管与输料管之间连接有过渡软管,而转轴远离出料管的一端连接有传动杆。
30、进一步的,所述送料风机内部的扇叶轴伸出后连接有变速箱,且变速箱的端部连接有传动组件。
31、进一步的,所述传动组件包括偏心轮、传动升降推杆和直角推板,所述偏心轮的侧面转动连接有传动升降推杆,且传动升降推杆的顶部设置有直角推板。
32、进一步的,所述传动组件还包括导向滑轨,所述直角推板的一侧外部设置有导向滑轨。
33、进一步的,所述导向滑轨的一侧与投饵小车壳体侧面以及储料仓侧面固定连接,且直角推板与导向滑轨滑动连接。
34、本发明提供了一种基于陆基工厂化水产养殖的智能投饵装备,具备以下
35、有益效果:
36、1.该基于陆基工厂化水产养殖的智能投饵装备,通过分析压强数据量化鱼群的摄食强度,通过对不同摄食状态下的压强数据进行精确分析,能够实时监控鱼群的摄食活动,并根据摄食强度的变化自动调整投饵策略,提高饲养效率和资源的利用率,其次,利用随机森林算法,对摄食状态进行高精度的分类预测,确保了投饵决策的准确性和科学性,此外,通过在微型电脑上运行yolov5算法对水面剩余饵料进行有效的目标检测,进一步优化了饵料的使用,减少浪费,保证了环境的可持续性,而这种整合了数据采集、机器学习分析和自动化控制的系统不仅提升了陆基工厂化水产养殖的效率,也为精细化、智能化水产养殖提供了创新的技术支持。
37、2.该基于陆基工厂化水产养殖的智能投饵装备,直角推板()升降过程中上推传动杆()由此使得出料管()摆动,而饵料在送料风机()作用下依次穿过过渡软管()从摆动中的出料管()端部排出,通过调整送料风机()的转速提高饵料飞出距离,由此使得投饵小车壳体沿占地面积较大的养殖池边侧直线移动时能够将饵料均匀布洒至养殖场各位置,以实现均匀布饵。
本文地址:https://www.jishuxx.com/zhuanli/20240911/291081.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表