一种基于公网链路的车路协同源数据交互联动系统的制作方法
- 国知局
- 2024-09-11 14:32:32
本发明涉及物联网,更具体地说,本发明涉及一种基于公网链路的车路协同源数据交互联动系统。
背景技术:
1、随着智能交通和自动驾驶技术的快速发展,车辆需要获取更多、更准确的外部环境信息以实现安全、高效的行驶。传统的车辆感知系统主要依赖车载传感器,但在复杂环境或极端天气下,其感知能力可能受限。因此,通过路侧智能终端与车端的信息交互,可以有效提升车辆对外部环境的感知能力,为辅助驾驶、自动驾驶提供更丰富的信息支持。
2、智能交通系统是指通过现代信息、通讯、控制等技术,利用现有的交通设施和运载工具进行整合,打造安全、快捷、高效、绿色的交通体系。its起源于交通信息化和交通工程,并在全球范围内得到了快速发展。
3、随着信息技术和通信技术的快速发展,车联网作为智能交通的重要组成部分,逐渐崭露头角。车联网利用车辆上的传感器设备、车载设备和通信模块,通过移动通信技术、汽车导航系统以及智能终端设备与互联网进行连接。它实现了车与云平台、车与车、车与路、车与人、车内五个通信场景,为汽车驾驶和交通管理应用提供环境感知、信息交互与协同控制能力。
4、先进驾驶辅助系统作为车联网和智能交通的重要组成部分,近年来在技术创新方面取得了显著成就。传感器技术的突破,特别是高分辨率摄像头、毫米波雷达、激光雷达等传感器的融合应用,极大地提高了adas系统的感知能力。同时,深度学习、神经网络等先进算法的应用,使得adas系统能够处理更加复杂的数据,实现更高级别的驾驶辅助功能。
5、综上所述,智能交通系统、车联网技术和先进驾驶辅助系统的快速发展,为中国乃至全球的交通行业带来了革命性的变化。通过技术创新和政策支持,我们有理由相信,未来的交通将更加安全、高效、绿色和智能。
技术实现思路
1、为了克服现有技术的上述缺陷,本发明的实施例提供一种基于公网链路的车路协同源数据交互联动系统,涉及智能交通、车联网、自动驾驶技术领域,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案,一种基于公网链路的车路协同源数据交互联动系统,所述系统包括路侧智能终端、车载接收设备;
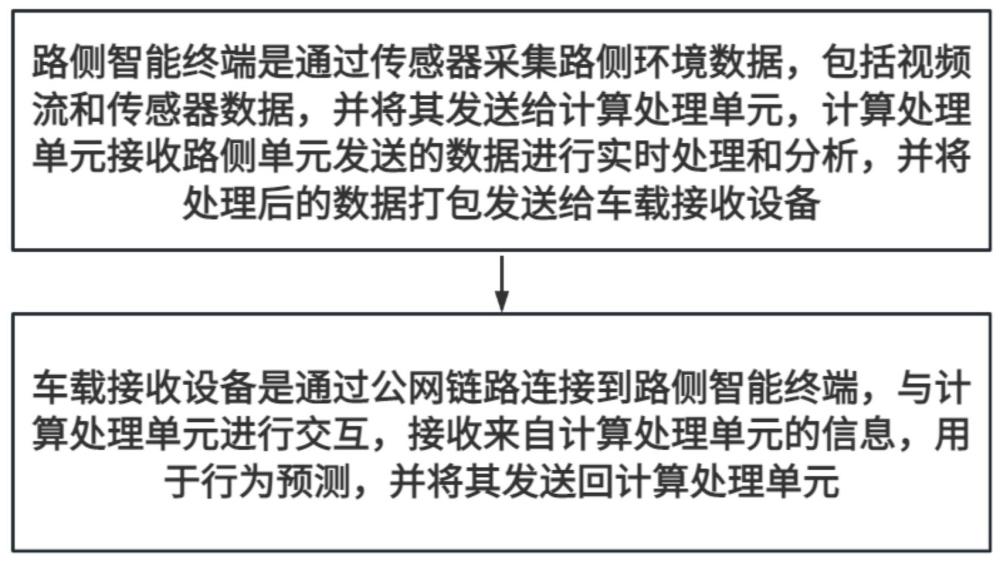
3、路侧智能终端:包括路侧单元和计算处理单元,通过传感器采集路侧环境数据,包括视频流和传感器数据,并将其发送给计算处理单元,计算处理单元接收路侧单元发送的数据进行实时处理和分析,并将处理后的数据打包发送给车载接收设备;
4、车载接收设备:通过公网链路连接到路侧智能终端,与计算处理单元进行交互,接收来自计算处理单元的信息,用于行为预测,并将其发送回计算处理单元。
5、在一个优选地实施方式中,所述路侧单元,用于采集路侧环境数据,并将其发送给计算处理单元,具体步骤如下:
6、步骤a1、数据采集:使用摄像头和雷达传感器采集路侧环境数据,包括车辆位置、速度、行驶方向,得到视频流和传感器数据;
7、步骤a2、数据融合:为每个摄像头帧和雷达数据点添加时间戳,确保不同传感器的数据在时间上同步,将摄像头和雷达的数据结合起来,并与高精度地图、历史数据进行融合和分析,将其发送给计算处理单元。
8、在一个优选地实施方式中,所述步骤a1数据采集中,使用摄像头和雷达传感器采集路侧环境数据,包括车辆位置、速度、行驶方向,得到视频流和传感器数据,进一步包括以下步骤:
9、步骤a101、视频流采集:使用摄像头捕获路侧的实时视频流,记录道路上车辆、行人、交通信号灯和其他道路使用者的活动情况;
10、步骤a102、传感器数据采集:将雷达传感器安装在适当的高度和角度,并配置扫描频率和探测范围,通过雷达探测周围环境,捕捉车辆的位置、速度和行驶方向信息,所述车辆位置计算公式为:;其中,d表示在位置与之间的欧几里得距离;所述车辆速度计算公式为:;其中,是车辆在时间间隔内移动的距离,v表示车辆的速度;所述行驶方向计算公式为:;其中,表示车辆行驶方向的角度,和分别表示车辆在某一时刻的位置坐标。
11、在一个优选地实施方式中,所述计算处理单元,接收路侧单元发送的数据并进行实时处理和分析,包括车辆轨迹识别、车辆特征识别以及车辆事件识别,将处理后的数据打包发送给车载接收设备,具体步骤如下:
12、步骤b1、车辆轨迹识别:对视频流进行图像处理,包括图像增强、去噪,使用目标检测算法在图像中标记出车辆的位置和边界框,通过对车辆目标的跟踪,确定车辆的运动轨迹;
13、步骤b2、车辆特征识别:包括车辆识别和车牌识别,所述车辆识别是对车辆的品牌、型号、颜色特征进行识别;所述车牌识别是识别车辆的车牌号码,用于车辆身份的确认和追踪;
14、步骤b3、车辆事件识别:监测车辆是否违反交通规则,包括闯红灯、超速、逆行,通过分析车辆之间的相对位置和速度,预警发生的碰撞事件。
15、在一个优选地实施方式中,所述步骤b1车辆轨迹识别中,使用目标检测算法在图像中标记出车辆的位置和边界框,通过对车辆目标的跟踪,确定车辆的运动轨迹,进一步包括以下步骤:
16、步骤b101、目标跟踪:利用目标跟踪算法跟踪车辆目标在连续帧间的位置变化,将每个目标在不同帧中的位置信息整合起来,形成目标的运动轨迹,根据目标在不同时间点的位置信息,结合时间序列数据,计算车辆的速度、加速度运动参数,定义车辆在连续帧中的位置数据为,其中t表示时间步,时间间隔为,使用中心差分法计算车辆的速度和加速度,具体计算公式如下:
17、,,,
18、其中,和分别为车辆在x和y方向上的速度,和表示车辆在时间步时刻的位置坐标,即,和分别为车辆在x和y方向上的加速度,在时间步t时的速度分量,和表示车辆在时间步时刻的速度分量,即;
19、步骤b102、轨迹分析:对确定的运动轨迹进行分析,提取车辆的行驶路径、速度变化,通过连接所有的位置点组成车辆在空间中的轨迹,直观地展示车辆的运动路径,对于每个时间步的速度,绘制速度随时间变化的曲线,分析在运动状态下的速度变化特征。
20、在一个优选地实施方式中,所述步骤b3车辆事件识别中,监测车辆是否违反交通规则,包括闯红灯、超速、逆行,通过分析车辆之间的相对位置和速度,预警发生的碰撞事件,进一步包括以下步骤:
21、步骤b301、闯红灯检测:通过车辆位置和交通信号灯的状态进行分析,当车辆在红灯状态下继续移动,则判定违反交通规则;
22、步骤b302、超速检测:基于车辆的速度和路段的限速信息,判断车辆是否超出限速;
23、步骤b303、逆行检测:通过车辆的行驶方向和道路的规定方向进行分析,当车辆与道路规定的行驶方向相反,则判定存在逆行行为;
24、步骤b304、碰撞预警:将车辆a和b的位置分别表示为和,速度分别表示为和,则车辆a和b的相对位置为:,相对速度为:;基于车辆之间的相对位置和速度信息,计算两车之间的最短距离,当最短距离小于车辆长度的一半,判断碰撞发生,并发出预警,具体计算公式如下:
25、
26、其中,是最短距离,是车辆a相对于车辆b的位置矢量,是车辆a相对于车辆b的速度矢量,是速度矢量的模。
27、在一个优选地实施方式中,所述车载接收设备在车辆启动时初始化,通过公网链路连接到路侧智能终端,与计算处理单元进行交互,接收来自计算处理单元的信息,用于行为预测和环境分析,并将其发送回计算处理单元,具体步骤如下:
28、步骤c1、建立连接:当车辆启动时,车载接收设备开始初始化,并通过车辆的车载网络建立与公网链路的连接;
29、步骤c2、信息交互:利用建立的公网链路,车载接收设备主动连接到附近的路侧智能终端,并与计算处理单元进行信息交互,接收来自计算处理单元的信息,进行行为预测和环境分析。
30、在一个优选地实施方式中,所述步骤c1建立连接中,通过车辆的车载网络建立与公网链路的连接,进一步包括以下步骤:
31、步骤c101、身份验证:车载接收设备使用rsa签名验证公网链路服务器提供的数字证书的真实性和完整性,具体公式为:;其中,m是消息,s是签名,是服务器的公钥;
32、步骤c102、密钥交换:在身份验证成功后,通过diffie-hellman密钥交换协议来生成共享密钥,用于在公网链路上安全地交换对称密钥,具体公式如下:;其中,g是公共基础,p是素数模数,a和b是双方的私密参数;
33、步骤c103、加密:建立了共享密钥后,通信双方使用aes对称加密算法来保护数据的隐私和完整性,具体公式为:;其中,k是共享密钥,m是明文消息,c是加密后的密文。
34、在一个优选地实施方式中,所述步骤c2信息交互中,利用建立的公网链路,车载接收设备主动连接到附近的路侧智能终端,并与计算处理单元进行信息交互,接收来自计算处理单元的信息,进行环境分析和行为预测,进一步包括以下步骤:
35、步骤c201、路面状况检测:根据路侧智能终端收集的数据,包括摄像头捕获的图像,进行路面状况分析,检测湿滑路面、障碍物情况,将彩色图像转换为灰度图像,并分析像素灰度值的变化,设定一个灰度阈值,低于该阈值的区域表示湿滑路面:
36、步骤c202、交通流量预测:结合路侧智能终端收集的车辆位置和速度数据,预测未来时间段内的交通流量,具体计算公式如下:
37、
38、其中,是位置x和时间的交通密度,是流量函数,描述了密度下的交通流量,是对时间的偏导数,表示交通密度随时间的变化率,是对位置x的偏导数,表示流量函数随位置的变化率。
39、本发明的有益效果是:通过实时采集视频信息、车辆轨迹识别、车辆特征识别、事件识别的多维度信息,并将这些信息进行高精度融合,为车辆提供更为全面、准确的环境感知能力,在数据传输过程中,采用了加密技术来保障信息的安全性,防止数据被非法获取和篡改,并通过公网链路将采集到的信息精准发送给车端的车载接收设备,避免了信息的泛洪和冗余,提高了数据传输的效率和安全性。
本文地址:https://www.jishuxx.com/zhuanli/20240911/291325.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。