一种水下采油树的海生物防护系统的制作方法
- 国知局
- 2024-09-11 14:33:08
本发明涉及海洋石油钻探设备,具体而言,涉及一种水下采油树的海生物防护系统。
背景技术:
1、现有的采油树的海生物防护系统是设计用于保护水下采油设备不受海洋生物的影响或损害的一种技术系统。
2、在水下作业过程中,水下设备的移动和操作会引起水流的变化和振动,这会影响周围海洋生物的行为,使它们误以为设备是潜在的栖息地或猎物,从而导致冲撞。
3、此外,海洋生物在人造构件上的附着及其在构件上的大量繁殖会严重影响构件功能的正常发挥,在水下采油树的应用中,海洋生物污染频繁发生在阀门部位,海洋生物的附着导致阀门的部件被堵塞或卡住,影响阀门的正常操作和运行,这导致阀门无法开启或关闭,造成生产中断或安全隐患。
4、此外,一些海洋生物分泌酸性物质或产生生物膜,这会加速金属表面的腐蚀,并降低阀门的寿命,长期暴露在海洋环境中,这种腐蚀导致阀门的损坏和泄漏。
5、因此,有必要设计一种水下采油树的海生物防护系统用于解决现有技术中水下采油树的作业面临生物附着及生物冲撞的技术问题。
技术实现思路
1、鉴于此,本发明提出了一种水下采油树的海生物防护系统,解决现有技术中水下采油树的作业面临生物附着及生物冲撞的技术问题。
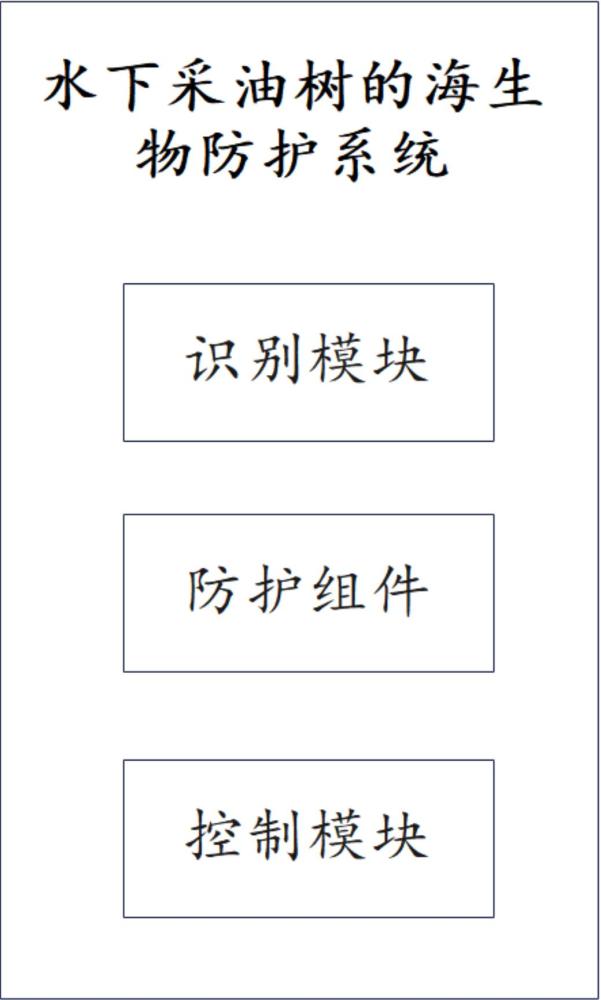
2、本发明提出了一种水下采油树的海生物防护系统,包括:
3、识别模块,在采油树阀门的一侧设置声呐单元,所述声呐单元获取所述采油树阀门每一预设距离内生物体的体积和个数,并对每一所述预设距离范围内的生物情况生成环境评分;
4、防护组件,设置在所述采油树阀门的外侧,所述防护组件预设有多种运行模式;
5、控制模块,根据所述环境评分控制所述防护组件的运行模式。
6、优选的,所述识别模块,所述声呐单元每间隔单位时间t秒发射声波,并接收生物体反射的回波信号,通过声波的传播时间计算实时距离k,通过分析回波强度及波形模式,识别生物体并估算体积,并且统计回波信号的数量,得到生物体个数,其中,
7、获取所述实时距离k,将所述实时距离k与预设的标准距离ka进行比对,并预设有第一生物体积q1和第二生物体积q2,根据比对结果与范围内生物体体积与预设生物体积的关系选择参评数据;
8、当k大于ka时,获取生物体体积中大于第一生物体积q1的数量作为参评数据,并且获取每一大于所述第一生物体体积的体积值gi,i=1,2,…,n;
9、当k小于或等于ka时,获取生物体体积中大于第二生物体积q2的数量作为参评数据;
10、其中,q1>q2。
11、优选的,所述识别模块,当识别到k大于ka距离范围的所述参评数据时,对所述参评数据进行标记,并且修正所述声呐单元发射声波单位间隔时间为t1,其中t1<t,判断变化距离δk与第一距离k1和第二距离k2的关系,其中k-kt=δk,且k1<k2<0,其中k1和k2根据第一生物体积q1进行设定,kt为上一单位时间获取的距离值;
12、根据所述变化距离δk与所述第一距离k1和第二距离k2的关系,实时分析生物情况p:
13、当δk<k1时,生成k大于ka距离范围内的生物冲撞环境评分为第一生物情况p1;
14、当k1≤δk<k2时,生成k大于ka距离范围内的生物冲撞环境评分为第二生物情况p2;
15、当k2≤δk时,生成k大于ka距离范围内的生物冲撞环境评分为第三生物情况p3;
16、其中,根据每一生物情况的生物冲撞的危险系性排序有p1>p2>p3;
17、且根据大于所述第一生物体体积的体积值gi设置有冲量修正系数ei,其中体积值gi越大冲量修正系数ei越小;
18、还根据大于所述第一生物体积的数量个数n设置有几率修正系数hi,其中数量个数n越大几率修正系数hi越小;
19、即修正后的生物冲撞环境评分pz,通过以下公式计算获得:
20、;
21、其中n=1,2,3。
22、优选的,所述识别模块,当识别到k小于或等于ka距离范围的所述参评数据时,对所述参评数据进行标记,并且修正所述声呐单元发射声波单位间隔时间为t2,其中t<t2,并且统计回波信号的数量,得到该生物体个数,其中,
23、判断变化数量δn与第一数量n1和第二数量n2的关系,其中n-nt=δn,且0<n1<n2,nt为上一单位时间获取的数量值;
24、根据所述变化数量δn与所述第一数量n1和第二数量n2的关系,实时生成生物附着环境评分pf:
25、δn<n1时,生成k小于或等于ka距离范围内的生物环境评分为第一生物附着环境评分pf1;
26、当n1≤δn<n2时,生成k小于或等于ka距离范围内的生物环境评分为第二生物附着环境评分pf2;
27、当n2≤δn时,生成k小于或等于ka距离范围内的生物环境评分为第三生物附着环境评分pf3;
28、其中,根据生物附着的污染级别系数有pf1<pf2<pf3。
29、优选的,所述防护组件,还包括:
30、后护盖,穿设在所述采油树阀门上;
31、衬套,设置在所述后护盖的一侧,所述衬套与所述后护盖螺栓连接。
32、优选的,所述衬套,包括:
33、操作盖板,设置在所述衬套的外表面,所述操作盖板上表面附着有基于硅酮的防污涂料,所述操作盖板的中心设置有第二凹槽,所述第二凹槽的内侧面设置有第一凹槽,所述第一凹槽的中心设置有通孔,且所述第二凹槽的四周设置有填料孔,每一所述填料孔的一侧设置有螺栓孔;
34、盖板把手,设置在所述操作盖板的外表面。
35、优选的,所述后护盖与所述衬套上的所述填料孔相对的设置有穿孔,所述穿孔内穿设有所述橡胶棒。
36、优选的,控制模块,包括:
37、螺母调节单元,包括液压驱动器,用于调节螺母的行程;
38、传感器,用于检测螺母的位置和行程。
39、优选的,所述控制模块,根据所述生物冲撞环境评分pz和所述生物附着环境评分pf控制所述液压驱动器的行程,其中,
40、当所述生物冲撞环境评分pz小于标准生物冲撞环境评分pz1时,以所述生物冲撞环境评分pz的控制逻辑介入控制;
41、当所述生物附着环境评分pf大于所述标准生物附着环境评分pf1时,以所述生物附着环境评分pf的控制逻辑介入控制。
42、优选的,所述控制模块,当以所述生物冲撞环境评分pz的控制逻辑进行控制时,获取所述标准生物冲撞环境评分pz1与所述生物冲撞环境评分pz的差值记为δpz,将∆pz与预设的第一防撞控制系数pz1及第二防撞控制系数pz2进行比对,其中pz2<pz1,通过比对结果控制所述液压驱动器;
43、当δpz<pz1时,控制所述液压驱动器调整所述螺母的行程到第二限位;
44、当pz2<δpz≤pz1时,控制所述液压驱动器调整所述螺母的行程到第一限位;
45、当δpz≤pz2时,控制所述液压驱动器调整所述螺母的行程到闭合;
46、其中第一限位的开合度小于第二限位的开合度;
47、所述控制模块,当以所述生物附着环境评分pf的控制逻辑进行控制时,获取所述生物附着环境评分pf与标准生物附着环境评分pf1的差值记为δpf,
48、将δpf与预设的防附着控制系数pff进行比对,通过比对结果控制所述液压驱动器;
49、当δpf<pff时,控制所述液压驱动器调整所述螺母的行程第三限位;
50、当pff≤δpf时,控制所述液压驱动器调整所述螺母的行程完全打开;
51、其中第三限位的开合度大于第二限位的开合度。
52、与现有技术相比,本发明的有益效果在于,通过声呐单元获取周围生物体的体积和数量,并且能够分析回波强度和波形模式,从而实现对不同生物的识别和估算;根据识别到的生物体信息,系统能够生成环境评分,评估生物冲撞和生物附着的风险程度,并且能够根据不同情况生成不同级别的评分,从而更精确地判断环境状况;控制模块根据环境评分自动调节防护组件的运行模式,能够灵活地应对不同的环境变化,保护采油树免受生物冲撞和附着的影响。
本文地址:https://www.jishuxx.com/zhuanli/20240911/291365.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表