基于传统温室大棚的菠菜收割机器人及其控制系统
- 国知局
- 2024-09-11 14:43:08
本发明涉及农机设备领域,尤其涉及一种基于传统温室大棚的菠菜收割机器人及其控制系统。
背景技术:
1、近年来,随着我国农业的高速发展,果蔬种植规模越来越大,产量也逐年随之增长,但众所周知果蔬采摘具有季节性,并且果蔬的采摘期往往较短,这就造成果蔬成熟后采摘时,需要在短时间内完成采摘工作。但就我国目前状况来讲,大部分果蔬的采摘还是以传统的人工采摘为主,机械化采摘程度不高,而传统人工采摘具有以下弊端:
2、一是成本高、效率低、劳动强度大:传统的果蔬采摘需要大量的人力投入,成本高昂,且人工采摘劳动强度大、效率低,难以满足市场需求;
3、二是劳动力短缺:随着我国城市化进程的加速,农村劳动力外流严重,导致农业生产劳动力短缺,影响果蔬采摘的效率和质量。
4、为了解决传统人工采摘的上述弊端,国内外研究单位相继开发了多种果蔬采摘机器人,但是,现阶段还没有针对菠菜等需要扎堆打捆的一类作物的采摘设备。
5、综上可知,现有技术在实际使用上显然存在不便与缺陷,所以有必要加以改进。
技术实现思路
1、针对上述的缺陷,本发明的目的在于提供一种基于传统温室大棚的菠菜收割机器人及其控制系统,其可以针对菠菜等需要扎堆打捆的一类作物的采摘工作,可以实现自动化控制,机械化采摘程度高。
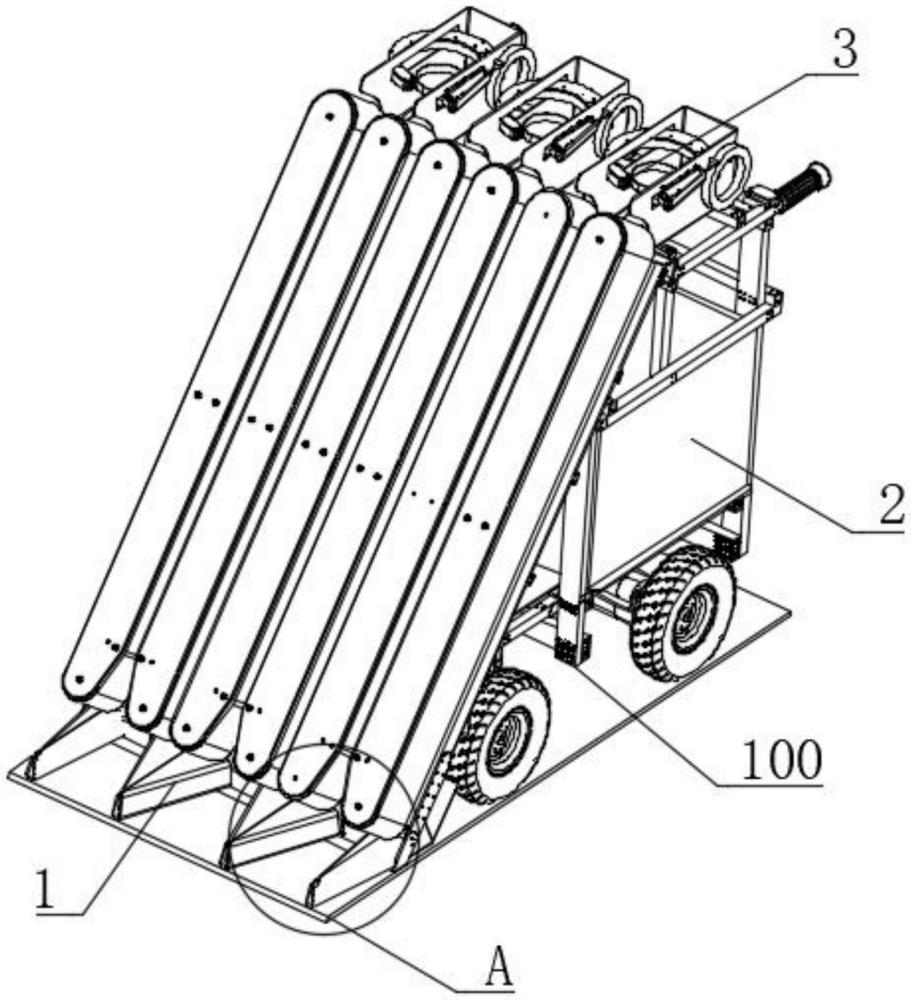
2、为了实现上述目的,本发明提供一种基于传统温室大棚的菠菜收割机器人,包括设置于设备前进端的导料结构、设置于设备后端的盛料仓、设置于盛料仓上方的捆扎机构以及将物料由导料结构传输至捆扎机构的传输机构;所述导料结构包括活动安装于所述总架体的活动支架、间隔分布于活动支架至少一组的导料板组;所述导料板组之间构成聚料空间,所述聚料空间为前宽、后窄结构;所述活动支架受到一左右往复结构的驱动沿其延伸方向往复移动。
3、根据本发明的基于传统温室大棚的菠菜收割机器人,所述左右往复结构包括设置于活动支架上的纵向槽、延伸至纵向槽内的拨杆、驱动拨杆进行活动的转盘及驱动转盘转动的驱动器;所述拨杆偏心安装于转盘。
4、根据本发明的基于传统温室大棚的菠菜收割机器人,所述捆扎机构包括对应传输机构传输口的捆扎平台、设置于捆扎平台两侧的扎带传送组件及扎带拉伸组件;所述扎带拉伸组件包括拉动扎带端部穿过捆扎平台的夹爪及驱动夹爪活动的驱动壁;捆扎时,驱动壁驱动夹爪夹取扎带端部穿过捆扎平台,待物料堆积至预定量后,夹爪驱动扎带端部复位。
5、根据本发明的基于传统温室大棚的菠菜收割机器人,所述捆扎机构还包括对扎带进行固接处理的热熔结构;该热熔结构包括设置于捆扎平台侧壁的热熔片;待夹爪驱动扎带端部复位后,扎带端部与扎带内部形成一位于热熔片热熔区域内重叠区。
6、根据本发明的基于传统温室大棚的菠菜收割机器人,所述热熔片在受到物料按压的冲击后可以沿捆扎平台的进料方向移动,并在失去冲击后复位;所述驱动壁为弧形杆,并受到一转动器的驱动而进行活动。
7、根据本发明的基于传统温室大棚的菠菜收割机器人,所述捆扎平台侧壁设置有用于安装热熔片并对其导向的导轨;所述导轨上安装有对热熔片移动产生阻力的阻力弹性件。
8、根据本发明的基于传统温室大棚的菠菜收割机器人,所述阻力弹性件为安装于导轨上的弹簧。
9、根据本发明的基于传统温室大棚的菠菜收割机器人,所述捆扎平台底部上设置有下料口,所述下料口处设置有对其打开、封堵的活动挡板。
10、根据本发明的菠菜收割机器人的控制系统,包括:板载模块、常规i/o接口程序库、usart接口程序库、can接口程序库、陀螺仪程序库、任务运行程序、led_task函数、lcd_task函数、imu_task函数、servo_task函数、chassis_task函数、自制电机驱动器函数、驱动器编码器程序、驱动器电机运行程序、驱动器pid运算程序、驱动器电机模式程序、驱动器电机通信程序;其中,所述驱动器的速度模式使用pid算法进行运算。
11、根据本发明的菠菜收割机器人的控制系统,包括:加入p比例后小车还是没有办法很好的到达目标点,则加入i微分;在加入微分后若小车没有到达指定目的地则进行最大限度的靠近,若是超出则进行返回;若设备抖动后才能到达目标点,此时加入d微分来进行控制了,d微分。
12、本发明提供了一种基于传统温室大棚的菠菜收割机器人,包括设置于设备前进端的导料结构、设置于设备后端的盛料仓、设置于盛料仓上方的捆扎机构以及将物料由导料结构传输至捆扎机构的传输机构;在对蔬菜进行采摘工作时,行走机构驱动设备前进,在前进过程中,导料结构将物料进行聚集(通常情况下菠菜是成排种植,在采摘过程中,只需要操控设备沿种植方向移动即可),所聚集的物料会通过传输机构传输至捆扎机构所在位置,进过成堆打捆后落入至盛料仓内。所述导料结构包括活动安装于所述总架体的活动支架、间隔分布于活动支架至少一组的导料板组;所述导料板组之间构成聚料空间,所述聚料空间为前宽、后窄结构,具体在本实施例中,为了保证聚料时的导料效果,所述导料板组包括对称设置的两块三角聚料板,在中部形成梯形的聚料空间。当然,所述聚料空间的侧壁也为非直边的结构(即可以为弧形或其他形状)。本发明可以针对菠菜等需要扎堆打捆的一类作物的采摘工作,可以实现自动化控制,机械化采摘程度高。
技术特征:1.一种基于传统温室大棚的菠菜收割机器人,其特征在于,包括设置于设备前进端的导料结构、设置于设备后端的盛料仓、设置于盛料仓上方的捆扎机构以及将物料由导料结构传输至捆扎机构的传输机构;
2.根据权利要求1所述的基于传统温室大棚的菠菜收割机器人,其特征在于,所述左右往复结构包括设置于活动支架上的纵向槽、延伸至纵向槽内的拨杆、驱动拨杆进行活动的转盘及驱动转盘转动的驱动器;
3.根据权利要求1所述的基于传统温室大棚的菠菜收割机器人,其特征在于,所述捆扎机构包括对应传输机构传输口的捆扎平台、设置于捆扎平台两侧的扎带传送组件及扎带拉伸组件;
4.根据权利要求3所述的基于传统温室大棚的菠菜收割机器人,其特征在于,所述捆扎机构还包括对扎带进行固接处理的热熔结构;该热熔结构包括设置于捆扎平台侧壁的热熔片;
5.根据权利要求4所述的基于传统温室大棚的菠菜收割机器人,其特征在于,所述热熔片在受到物料按压的冲击后可以沿捆扎平台的进料方向移动,并在失去冲击后复位;
6.根据权利要求5所述的基于传统温室大棚的菠菜收割机器人,其特征在于,所述捆扎平台侧壁设置有用于安装热熔片并对其导向的导轨;
7.根据权利要求6所述的基于传统温室大棚的菠菜收割机器人,其特征在于,所述阻力弹性件为安装于导轨上的弹簧。
8.根据权利要求3所述的基于传统温室大棚的菠菜收割机器人,其特征在于,所述捆扎平台底部上设置有下料口,所述下料口处设置有对其打开、封堵的活动挡板。
9.一种基于上述权利要求1所述的菠菜收割机器人的控制系统,其特征在于,包括:板载模块、常规i/o接口程序库、usart接口程序库、can接口程序库、陀螺仪程序库、任务运行程序、led_task函数、lcd_task函数、imu_task函数、servo_task函数、chassis_task函数、自制电机驱动器函数、驱动器编码器程序、驱动器电机运行程序、驱动器pid运算程序、驱动器电机模式程序、驱动器电机通信程序;
10.根据权利要求9所述的菠菜收割机器人的控制系统,其特征在于,包括:加入p比例后小车还是没有办法很好的到达目标点,则加入i微分;
技术总结本发明适用于农机设备领域,提供了一种基于传统温室大棚的菠菜收割机器人,包括设置于设备前进端的导料结构、设置于设备后端的盛料仓、设置于盛料仓上方的捆扎机构以及将物料由导料结构传输至捆扎机构的传输机构;所述导料结构包括活动安装于所述总架体的活动支架、间隔分布于活动支架至少一组的导料板组;所述导料板组之间构成聚料空间,所述聚料空间为前宽、后窄结构;所述活动支架受到一左右往复结构的驱动沿其延伸方向往复移动,借此,本发明可以针对菠菜等需要扎堆打捆的一类作物的采摘工作,可以实现自动化控制,机械化采摘程度高。技术研发人员:马家兴,耿浚业,王鸿泽受保护的技术使用者:潍坊科技学院技术研发日:技术公布日:2024/9/9本文地址:https://www.jishuxx.com/zhuanli/20240911/291927.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
一种水稻立枯病防治方法
下一篇
返回列表