基于分布式超弱光纤光栅声波传感技术的车辆状态监测方法
- 国知局
- 2024-09-11 14:42:43
本发明涉及车辆状态监测,具体涉及一种基于分布式超弱光纤光栅声波传感技术的车辆状态监测方法。
背景技术:
1、分布式声波传感(distributed acoustic sensing,das)技术作为一种新型振动检测方法,因其无需外部电源、高灵敏度、强抗电磁干扰、宽传输频带和低维护成本等优势,能实现实时、全覆盖检测,已经成为目前热门的道路交通监测方案。超弱光纤光栅分布式声波传感技术(ultra-weak fiber bragg grating distributed acoustic sensing,uwdas)在具有das技术优点的同时,利用反射率低于0.1%的光栅对反射信号进行增强,使相干光具有更好的强度及方向性,从而获得更高的灵敏度和信噪比。因此,利用uwdas技术可以实现更高效更精确的道路交通监测。
2、由于道路环境的影响,设备采集的车辆信号通常含有大量噪声,因此需要先去噪以提高信号质量。目前,小波变换方法被广泛应用于信号去噪领域,其中小波阈值去噪方法因具有易于实现、原始信号特征保存完整的优点,已成为实际工程应用中最常见的信号去噪方法。阈值函数是小波阈值去噪的重要部分,选择合适的阈值函数是去噪结果优劣的关键。但传统的软、硬阈值函数各有其缺点。软阈值函数存在恒定误差的问题,硬阈值函数在阈值点处不连续。
3、在目前利用das技术进行车辆检测的研究中,主要使用的是以短时能量和短时过零率为信号特征的双阈值算法。虽然该算法能够基本完成车辆检测的任务,但其检测精度不高,容易造成车辆误检,同时对车流量和车辆速度的计算也不够准确。
4、现有技术的缺陷与不足:
5、(1)传统的das系统在实际应用中面临的主要问题是灵敏度和信噪比较低,这主要是由于标准单模光纤中的瑞利散射强度较弱,导致解调的声波信号信噪比低,这限制了系统对微小外界扰动的检测能力,从而影响了监测的准确性和可靠性。因此,需要采用更具优势的uwdas系统。
6、(2)das系统的性能受到路面状况以及周围环境的噪声等环境因素的影响,这些因素可能会干扰声波信号,降低监测的准确性。通过应用合适的噪声处理算法,可以在不使用昂贵设备的情况下显著提高信噪比,并增强系统在复杂环境下的监测能力。然而传统的小波阈值去噪算法在实际场景中的处理效果不佳,因此需要根据现实情况对该算法进行改进。
7、(3)虽然das技术能够提供大量的交通数据,但将das记录的数据转换为实时的交通流量和车辆速度估计还需要复杂的算法和车辆检测技术。目前传统双阈值算法检测车辆的精度不高,对交通参数的估算也不够准确,因此需要改进双阈值算法以提高das系统在道路交通监测中的识别准确性。
技术实现思路
1、针对传统小波阈值函数的缺陷,以及现有das技术检测车辆的灵敏度和准确率不足的现实问题。本发明将uwdas技术引入到道路交通监测中并改进小波阈值函数,提出一种基于分布式超弱光纤光栅声波传感技术的车辆状态监测方法,能够更精确地计算车流量和车辆速度,且易于实现、处理速度快;可用于实时自动化车辆状态监测。
2、本发明采取的技术方案为:
3、基于分布式超弱光纤光栅声波传感技术的车辆状态监测方法,包括以下步骤:
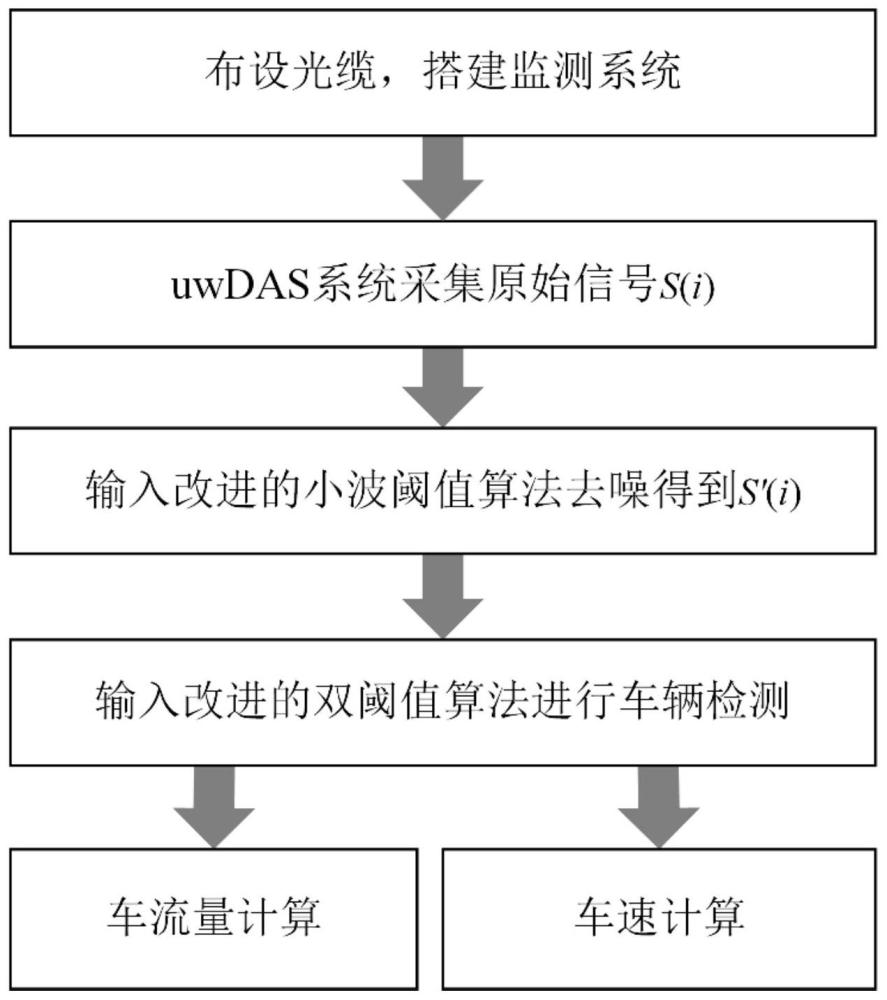
4、步骤1:使用uwdas系统采集道路上的车辆振动信号s(i);
5、步骤2:采用改进小波阈值算法对车辆振动信号s(i)进行去噪处理,得到去噪信号s′(i);
6、步骤3:将去噪信号s′(i)输入改进双阈值算法检测车辆,标记出车辆信号的起止点;
7、步骤4:基于车辆信号的检测数据进行车流量和车辆速度的计算。
8、所述步骤2中,对车辆振动信号s(i)进行去噪处理,包括以下步骤:
9、s2.1:对车辆振动信号s(i)进行小波变换,计算高频小波分解系数wj,k;
10、s2.2:采用小波阈值函数对高频小波分解系数wj,k进行量化处理,利用其去相关性去除噪声,得到去噪后的小波系数wj,k;
11、
12、上式中,wj,k为去噪后的小波系数;wj,k为小波分解系数;wj,k为阈值处理后的小波系数;λ是给定的阈值;sign为符号函数;a和b是两个可调节的经验参数,能够根据实际情况调节两个参数使函数在大于阈值后渐近线迅速靠近硬阈值函数。sign为符号函数,sign(wj,k)表示计算小波分解系数wj,k的符号。
13、进行阈值处理的高频小波分解系数就是wj,k,因为在第一部的小波变换中,在小波分解之前,就会采用小波滤波器提取高频和低频分量。
14、s2.3:进行小波逆变换,得到去噪信号s′(i)。
15、小波逆变换的公式为:其中,c是小波函数的常数,a和b是尺度和平移参数,wj,k是小波变换后的系数,ψ(x)是小波函数。
16、所述步骤3中,首先计算去噪信号s′(i)的短时能量e(n)、梅尔频率倒谱系数mfcc(n,i)以及梅能比mer(n);然后,采用去噪信号s′(i)的短时能量和梅能比作为信号特征,并使用模糊c均值聚类算法自适应选择高低阈值以完成双阈值算法,从而准确检测车辆信号。
17、所述步骤3包括以下步骤:
18、步骤3.1:将去噪信号s′(i)经过加窗函数分帧处理后得到sn(i):
19、sn(i)=ω(i)·x((n-1)·inc+i),1≤i≤l,1≤n≤fn;
20、上式中,n表示分帧后的第n帧,ω(i)为窗函数,l为帧长,inc为帧移长度,fn为分帧后的总帧数;sn(i)是加窗分帧后得到的结果,表示处理后的第n帧信号。分帧是利用信号的短时平稳性,将很长的信号分成很多的小段以方便处理,加窗是为了使分帧后的信号更加平稳。i是时域信号s′(i)的时间参数;x((n-1)·inc+i)为分帧步骤的公式,这表示第n帧中第i个样本的位置,通过改变n的值,可以依次处理每一帧。这个表达式把原始信号中相应的采样点映射到当前处理的帧中。
21、步骤3.2:计算短时能量e(n):
22、
23、步骤3.3:对sn(i)进行fft变换,并根据fft后的数据,计算谱线的能量:
24、e(n,k)=[fft[sn(i)]]2
25、上式中,k表示频域中的第k条谱线;e(n,k)表示第k条谱线的能量,fft[sn(i)]表示对3.1得到的结果进行离散傅里叶变换;在得到傅里叶变换结果fft[sn(i)]后,通过计算每个频点的幅度的平方来计算谱线能量e(n,k)。
26、步骤3.4:将第n帧的信号能量谱通过梅尔滤波器并求和,得到能量sum(n,m):
27、
28、上式中,hm(k)为梅尔滤波器的频域响应,m表示第m个梅尔滤波器,m是指滤波器总数;fn表示总帧数。
29、步骤3.5:计算梅尔频率倒谱系数mfcc(n,i):
30、
31、上式中,i代表该信号的时间参数。log[sum(n,m)]代表对梅尔能量取对数操作,通常使用以e为底数的对数。
32、步骤3.6:采用前两个滤波器的梅尔频率倒谱系数,并舍弃其他滤波器的梅尔频率倒谱系数,将求得的mfcc向下平移,使其幅值的最大值为零,从而保证所有的mfcc均为非正值,并依次取绝对值,具体如下:
33、mfccm=|mfcc(n,i)-max(mfcc(n,i))|,m=1,2;
34、其中,mfccm表示第m个梅尔滤波器的平移和绝对值处理后的结果。
35、然后把处理后的两个滤波器的mfcc相加起来,得到的结果记为mfccs(n),具体如下:
36、mfccs(n)=mfcc1+mfcc2
37、即将处理后的两个滤波器的mfcc相加起来,得到一个和。
38、步骤3.7:计算梅能比mer(n):
39、将信号的mfccs(n)与短时能量e(n)逐帧相比,即可得到梅能比:
40、
41、步骤3.8:计算模糊c均值聚类算法的高低阈值:
42、
43、上式中,h是高阈值,l是低阈值,c是聚类中心;a与β是两个经验参数;根据算法自动调整a与β值,能够基本实现阈值的自适应调整,提升双阈值算法的准确性和速度。max(c)表示计算出的聚类中心的最大值,即车辆信号的聚类中心;min(c)表示计算出的聚类中心的最小值,即噪声信号的聚类中心。
44、步骤3.8的公式利用聚类中心信号的高低阈值,其中,参数a用于确保高阈值位于车辆信号的高端,以避免将噪声误分类为有用信号。参数β用于调整低阈值相对于高阈值的位置,其值决定了低阈值向下偏移的幅度,从而提供了一个区分无用信号和车辆信号的边界。因此,当计算出信号的高低阈值后,就能有效分辨噪声信号和车辆信号,从而根据高低阈值特性标记出信号的范围。因此,采用该改进的双阈值算法进行车辆检测,能准确标记出车辆信号的起止点。
45、所述步骤4中,根据步骤3得到的车辆信号起止点信息,即可对车辆进行计数。具体是:
46、车辆信号的起止点信息是车辆进入监测点的时间和离开监测点的时间,即车辆信号出现在监测点的时间范围;而下面公式中的车辆进入和离开某传感器的时间,即为车辆检测算法检测出在该传感器处的信号起点和终点的时间数据,利用算法检测出的这些数据,就能代入公式计算车速。
47、同时计算车辆信号空间跨度与时间跨度的比值,得到该车辆的速度和方向;计算车辆速度的公式如下:
48、
49、其中,a和b分别车辆检测区域起始的传感器位置和结束的传感器位置,d为ab两点间的距离,ta1和ta2分别是车辆进入和离开a点的时间,tb1和tb2分别是车辆进入和离开b点的时间,如图8所示。计算出的v为该车辆从a点行驶到b点的平均速度。
50、由于uwdas技术分布式、长距离和连续性的特点,可以采用多点平均法来优化算法,这样即可提高速度估算的精度。
51、多点平均法来优化算法,具体为:上面的计算车辆速度的公式是只用两点a和b的数据直接计算两个点之间的平均速度。而多点法计算ab之间的平均速度,是基于ab点间还有若干个监测点,比如ab间有cde三个传感器,那么多点法就是利用acdeb五个点的数据来更精确的计算ab间的平均速度,具体来讲,分别计算ac,cd,de,eb间的平均速度并进行平均化。
52、采用多个传感器估算速度的公式如下:
53、
54、上式中,j为车辆检测区域的传感器个数;vr为相邻传感器之间的平均速度;v代表采用多点法计算的平均速度;r代表以传感器个数为标准的一个计数;比如v1代表第一个传感器和第二个传感器之间的平均速度,vr代表第r个传感器到第r-1个传感器之间的平均速度。
55、以此为基础搭建好完整的车辆状态监测系统,实时检测车辆位置,自动计算区域车辆数目以及目标车辆速度,初步实现智能化道路交通监测。
56、本发明一种基于分布式超弱光纤光栅声波传感技术的车辆状态监测方法,技术效果如下:
57、1)本发明车辆状态监测方法中,uwdas设备灵敏度高,达到光纤传感工程监测的较高水平,可以实时在线监测车辆状态。且具有大容量复用的特性,能多点感测,可以动态、分布式监测道路上的车辆状态
58、2)本发明改进的小波阈值去噪算法,其阈值函数在在阈值点连续,避免了硬阈值函数的不连续问题,且通过调节a和b,可使大于阈值后的函数渐近线快速接近硬阈值函数,能够解决软阈值函数的恒定误差问题,具有优良的去噪性能。
59、3)利用本发明改进的双阈值算法检测车辆,相比于传统的算法具有更高的准确率,能够更精确地计算车流量和车辆速度,且易于实现,处理速度快,可用于实时自动化车辆状态监测。
本文地址:https://www.jishuxx.com/zhuanli/20240911/291902.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表