基于粒子群算法的路噪主动控制系统参考信号选取方法
- 国知局
- 2024-09-11 14:41:26
本发明涉及路噪主动控制系统,具体为基于粒子群算法的路噪主动控制系统参考信号选取方法。
背景技术:
1、参考信号的质量直接影响着路噪主动控制系统的降噪效果,如何选择合适的参考传感器安装位置采集高相干性的参考信号是路噪主动控制系统开发的关键问题。rnc系统参考信号的选取是为了找到对乘客耳旁的路面噪声贡献量大的一组振动信号,可用于路面噪声贡献量分析的方法有传递路径分析法(tpa)和相干分析法。tpa方法包含传统tpa、otpa、opax、多级tpa等。传统tpa分析需要将振动源拆除,过程繁琐;otpa用激励参考信号代替tpa分析中的载荷激励信号,只需要在参考点和声压响应点布置传感器,传递函数的计算只考虑激励参考点和响应点之间的传递率特性,操作较为简便。相干分析法有常相干法、偏相干法和多重相干法等。常相干法只适用于不相干源的贡献分析;偏相干法将输入信号相干部分去掉,计算剩余信号对输出的影响;多重相干法将测量信号分成若干相干性小的组,计算该组输入的贡献量。目前,大多数都使用多重相干法作为参考信号的选取准则,通过枚举对比法或穷举法进行不同传感器组合的仿真和试验对比。
2、上述参考信号选取方法仅是通过简单的对比分析,难以获得具有最大多重相干系数的最优,且使用穷举法进行选取时,计算量会随初选点的数量而急剧增大,不利于提高系统的开发效率。
3、前馈式路噪主动控制系统需要通过加速度传感器来获取参考信号,而这个信号的质量直接决定了系统的噪音降低效果。因此,在路噪主动控制系统的开发中,选择合适的参考信号至关重要。而控制效果的好坏很大程度上取决于输入的参考信号是否适当。考虑到硬件计算能力和反应速度的限制,希望选取尽可能少且包含最多相关性信息的参考信号。然而考虑到实际车辆底盘结构复杂带来初选点数量过多,传统的方法如枚举法通常需要大量时间和复杂的实验条件,效率较低。
4、目前参考信号选取方法仅是通过简单的对比分析,难以获得具有最大多重相干系数的最优,且使用穷举法进行选取时,计算量会随初选点的数量而急剧增大,不利于提高系统的开发效率。在进行参考信号传感器选择时会出现初选点数量过多的问题,在搜索具有最大多重相干系数值的传感器组合时,搜索量过大,极大拖延系统开发时间。
5、因此需要对以上问题提出一种新的解决方案。
技术实现思路
1、本发明的目的在于提供基于粒子群算法的路噪主动控制系统参考信号选取方法,提出了基于粒子群算法的汽车路噪主动控制系统参考信号选择方法,将多重相干法与粒子群算法相结合,不仅提高了选取效率,降低参考信号寻优运算量,缩短参考信号选取时间,且只需要基础的数采设备,这对于路噪主动控制系统的研究具有重要意义,以解决背景技术中提出的技术问题。
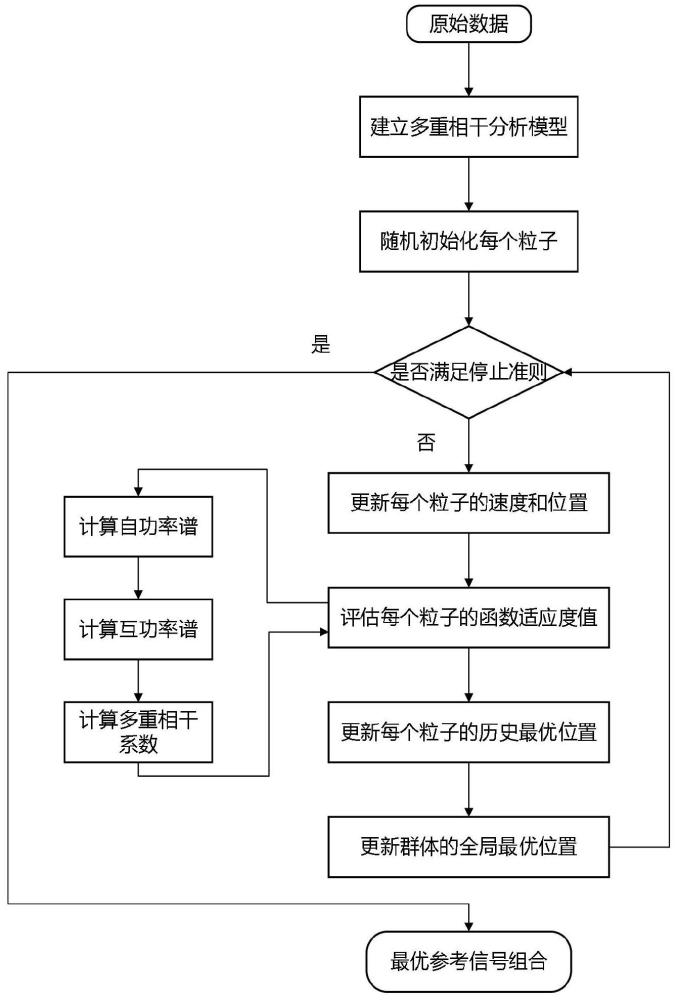
2、为实现上述目的,本发明提供如下技术方案:基于粒子群算法的路噪主动控制系统参考信号选取方法,至少包括以下步骤:
3、步骤一:利用lms test.lab采集系统采集加速度和车内噪声信号原始数据;
4、步骤二:建立数学模型,建立多重相干数学计算模型,通过计算参考信号和目标噪声信号之间的多重相干系数,确定参考信号的选择优化目标;
5、步骤三:粒子群算法编码方法,根据数学模型,确定粒子群算法的编码方法,将参考信号的选择表示为一个二进制向量,并定义适应度函数为选取的参考信号计算出的多重相干系数值的最大值;
6、步骤四:初始化种群,根据约束条件生成粒子群算法的初始种群,包括随机选择粒子群的初始位置和速度,并初始化个体历史最优位置和群体历史最优位置;
7、步骤五:参数初始化,设置粒子群算法的参数,包括惯性权重、认知系数、社会系数和最大飞行速度上限;
8、步骤六:计算下一代速度,根据粒子群算法的速度更新公式计算粒子的下一代速度;
9、步骤七:调整速度,根据约束条件调整各粒子的速度;
10、步骤八:计算下一代位置,根据粒子群算法的位置更新公式计算粒子的下一代位置;
11、步骤九:计算适应度,通过适应度函数计算群体中每个个体的适应度,即计算选取的参考信号计算出的多重相干系数值的最大值;
12、步骤十:更新历史最优位置,根据粒子群算法的规则更新各粒子的个体历史最优位置和群体历史最优位置;
13、步骤十一:迭代优化,如果没有达到结束条件,则返回步骤六,继续迭代优化;
14、步骤十二:输出最优结果,当达到结束条件时,输出记录中最优的一组编码,进行解码,并将结果输入到主动噪声控制系统中进行效果验证。
15、进一步地,所述步骤一包括传感器布置、加速度传感器布置和测试步骤。
16、进一步地,建立所述多重相干系数的表达式如下:
17、
18、式中,上标“h”和“+”分别表示共轭转置和广义逆矩阵,sxy(f)为参考信号和目标噪声信号间的互功率谱,sxx(f)为参考信号的自功率谱,syy(f)为目标噪声信号的自功率谱。
19、进一步地,步骤三中所述确定粒子群算法的编码方法为定义粒子群算法的决策变量:设x=(x1,x2,...,xm)为一个二维的二进制向量,表示参考信号点是否被选择,其中xi=1表示选择,xi=0表示不选择。
20、进一步地,所述根据约束条件生成粒子群算法的初始种群为各粒子群初始位置在定义域中随机选择,速度向量在[-vmax,vmax]d中随机选择,个体历史的最优位置pid(t)等于各微粒初始位置,群体最优位置pd(t)为适应值最好的微粒所对应的位置,进化代数t置为0。
21、进一步地,所述步骤五包括以下步骤:
22、设置惯性权重w,认知系数c1,社会系数c2及最大飞行速度上限vmax;
23、其中认知系数c1为2,社会系数c2为2,最大飞行速度为20,最大迭代次数为500,群体规模为50,惯性权重为0.5。
24、进一步地,所述步骤六中计算下一代速度的公式如下:
25、vid(t+1)=ωvid(t)+c1r1(pid(t)-xid(t))+c2r2(pd(t)-xid(t))
26、式中:
27、t为迭代代数,即第t次迭代;
28、vid(t+1)+和vid(t)表示第t+1次迭代与第t次迭代时粒子i的飞行速度;
29、xid(t+1)+和xid(t)表示第t+1次迭代和第t次迭代时粒子i的位置;
30、pid(t)表示粒子i的历史个体最优解,即i粒子在前t代搜索到的最优位置,即i粒子在搜索空间中经过t次迭代之后最终获得的最优解;
31、pd(t)表示在种群中运行最优粒子所获得的最优解,即所有粒子在搜索空间中经过反复多次的迭代之后最终获得的最优解。
32、r1与r2是区间[0,1]内的随机数,增加搜索的随机性。
33、进一步地,所述步骤八中计算下一代位置的公式通过步骤六中计算下一代速度的公式进行推算;
34、xid(t+1)=xid(t)+vid(t+1)
35、vid(t+1)表示第t+1次迭代时粒子i的飞行速度;
36、xid(t+1)和xid(t)表示第t+1次迭代和第t次迭代时粒子i的位置。
37、进一步地,所述步骤十在种群的演变进化进程中,粒子个体历史最优位置按照下式规则更新:
38、
39、其中:xid(t+1)和xid(t)表示第t+1次迭代和第t次迭代时粒子i的位置;pid(t)表示粒子i的历史个体最优解,即i粒子在前t代搜索到的最优位置,即i粒子在搜索空间中经过t次迭代之后最终获得的最优解;f(xid(t+1))为粒子迭代到t+1次时的适应度函数值,f(pid(t))为粒子i在t次迭代时的历史个体最优解的适应度函数值。
40、群体历史最优位置按照下式规则更新:
41、pd(t)∈{p0(t),p1(t),......,pn(t)}|f(pd(t))
42、=min{f(p0(t)),f(p1(t)),......,f(pn(t))}。
43、其中:n表示种群所含微粒的个数,pd(t)表示在种群中运行最优粒子所获得的最优解,即所有粒子在搜索空间中经过反复多次的迭代之后最终获得的最优解;
44、p0(t),p1(t),......,pn(t)表示各个粒子在t次迭代时的历史个体最优解;
45、f(p0(t)),f(p1(t)),......,f(pn(t))表示各个粒子在t次迭代时的历史个体最优解的适应度函数值。
46、与现有技术相比,本发明的有益效果是:
47、1、本发明结合多重相干法和粒子群算法,粒子群算法的优点之一是其简单而高效的实现,算法的基本原理是通过不断更新粒子的位置和速度来搜索最优解空间,每个粒子代表了潜在的解决方案,而粒子群中的所有粒子共同组成了搜索空间,通过不断地迭代更新粒子的位置,粒子群算法能够在解空间中找到较优解,在路噪主动控制系统中,可以将每个粒子的位置编码为参考传感器的位置,而每个粒子的适应度值则可以根据多重相干系数来评估。通过不断地更新粒子的位置和速度,并引入适当的惯性权重和个体与社会学习因子,粒子群算法可以在搜索空间中快速地找到潜在的最优解。
48、2、本发明中另一个粒子群算法的优点是其对于局部搜索和全局搜索的平衡。粒子群中的每个粒子都会根据个体最优和全局最优进行调整,从而实现了对于局部和全局最优解的搜索和利用。这种全局搜索和局部搜索的平衡有助于粒子群算法在解空间中快速地找到潜在的最优解。
本文地址:https://www.jishuxx.com/zhuanli/20240911/291836.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表