一种基于质心跟踪与迭代补偿的运动相位计算方法
- 国知局
- 2024-09-11 14:49:50
本技术涉及机器视觉领域,具体地涉及一种基于质心跟踪与迭代补偿的运动相位计算方法。
背景技术:
1、条纹投影视觉测量技术的原理是将预先编码的条纹图像投射到待测物体上,通过采集包含表面信息的变形条纹图像,并经过精密计算,重构出物体的三维形貌。该技术因其简便的测量操作和较高的测量精度,在工业场景中得到了广泛的应用。
2、随着工业自动化技术的不断进步,利用条纹投影进行生产流水线运动产品的三维重建逐渐成为了学术界研究的焦点。常规的条纹投影技术只适用于静态测量的场景,其三维重建的关键在于根据条纹光强计算出高精度的相位信息,并利用相位信息重建点云。然而产品的运动会导致相位解算失败,因此需要计算出运动对相位计算的影响,补偿运动导致的相位误差,得到高精度的运动相位数据,才能用于后续运动物体的三维重建。
技术实现思路
1、技术问题:
2、本发明的目的在于提供一种准确、可靠的基于质心跟踪与迭代补偿的运动相位计算方法,以解决上述背景技术面临的问题。
3、技术方案:
4、为实现上述目的,本发明提供如下技术方案:一种基于质心跟踪与迭代补偿的运动相位计算方法,所述方法包括如下步骤:
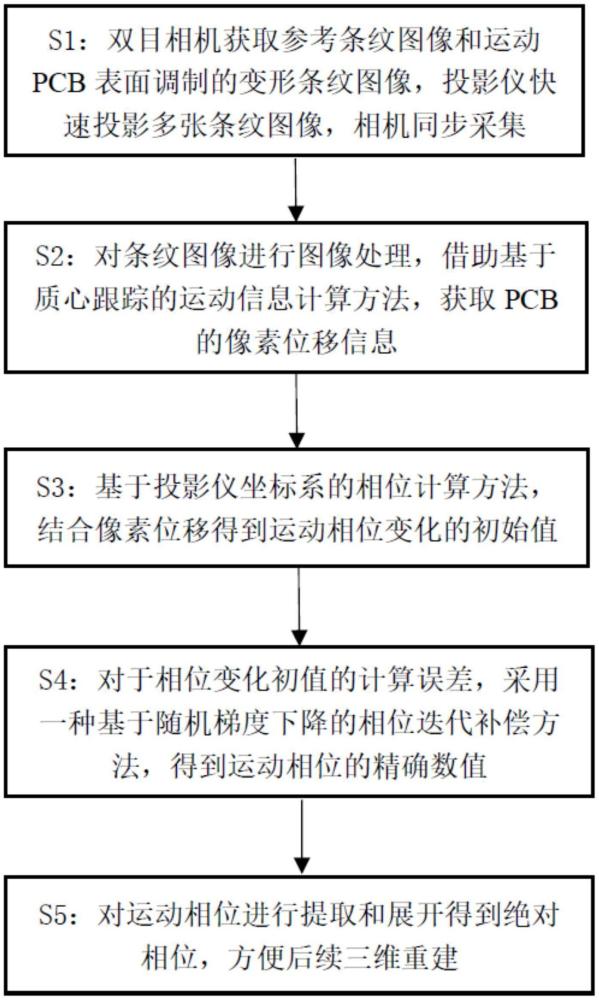
5、s1:借助双目相机获取参考条纹图像和经运动pcb表面调制的变形条纹图像,投影仪投影多张条纹图像,相机同步采集;
6、s2:对s1中的条纹图像进行图像处理,借助基于质心跟踪的运动信息计算方法,获取pcb的像素位移信息;
7、s3:采用一种基于投影仪坐标系的相位计算方法,结合像素位移得到运动相位变化的初始值;
8、s4:对于相位变化初值的计算误差,采用一种基于随机梯度下降的迭代补偿方法,得到运动相位的精确数值;
9、s5:对相位进行提取和展开得到运动pcb表面绝对相位,可应用于后续的同名点匹配三维重建。
10、作为本发明的一种改进,步骤s1中,首先采集12幅参考条纹图像作为背景,然后分别投影三种不同周期的四步正弦相移条纹图像至运动pcb表面,相机采集这些变形条纹图像用于计算相位信息。
11、作为本发明的一种改进,所述步骤s2,基于质心跟踪的运动信息计算方法,其具体过程为:
12、s21:从步骤s1中的参考条纹图像和经运动pcb表面调制的变形条纹图像,首先对参考图像和变形图像进行图像差分操作,由于物体的存在,条纹图像会发生明显的弯曲和偏移,这种变化与平整的参考条纹图像形成明显差异,有助于初步识别出物体的大致位置;
13、s22:对步骤s21中得到的差分图像,需要选取一个恰当的阈值,以便将背景差分的结果转换为清晰的二值图像;为了精确地区分pcb与背景,需要采用有效的阈值确定方法,本研究采用最大类间方差法作为确定阈值的策略,可自动计算出区分前景和背景的阈值;
14、s23:在二值化图像中,由于拍摄条件和pcb元件形状的多样性,常常会出现许多空洞和噪声点,为了提高质心计算的准确性,采用形态学滤波对图像进行后处理,采用了“先开后闭”的形态学滤波策略,首先利用开运算清除干扰的噪声点,随后通过闭运算来填补图像中的空洞;
15、s24:对于pcb质心计算,采用图像灰度密度平均方法来确定质心的坐标位置。
16、s25:在实际应用中,质心坐标的计算往往涉及到亚像素级别的精度要求。采用了基于图像频域变化的方法来实现亚像素级别的平移对准,公式为:
17、
18、图像沿x轴和y轴的位移以像素为单位被量化,分别表示为x0和y0。经过平移变换后,图像的新位置可表示为f(x-δx,y-δy)。图像f(x,y)首先通过傅里叶变换转换到频域,得到其频域表示f(u,w);将上述技术应用于运动pcb的像素位移计算,可得到精度较高的像素位移。
19、作为本发明的一种改进,所述步骤s3中,基于投影仪坐标系的相位计算方法,其具体过程为:
20、s31:采集一幅棋盘格标定板图像,使用角点提取算法得到棋盘格角点位置信息,以确定投影仪像素坐标与棋盘格三维控制点之间的对应关系,投影仪投射出两组分别沿水平和垂直方向变化的相移条纹,通过相移法和多频外差法来获得横向和竖向的绝对相位;
21、s32:利用垂直条纹图像的绝对相位值,可以精确地计算出该点在投影仪图像平面中up方向的坐标值;同理利用水平条纹图像的绝对相位值,可以计算出该点在投影仪图像平面中vp方向的坐标值;根据多个标定板角点的像素坐标计算出投影仪的内外部参数,完成投影仪坐标系重建;
22、s33:根据投影仪相对于相机的平移矩阵和旋转矩阵,可将物体运动导致的相机图像坐标系下的相位变化转化为投影仪图像坐标系下的相位变化;
23、投影仪图像上任意一点的相位是预设已知的,那么在求运动物体的相位变化δφ′n时,由质心跟踪方法求出物体运动前后在相机图像坐标系(uc,vc)下的质心坐标和然后根据投影仪参数得到物体在投影仪图像坐标系(up,vp)下的质心坐标和进而计算得到两点各自的相位
24、和最终得到相位变化δφ′n的值:
25、
26、对12幅变形条纹图像都计算出其相位变化值,该方法对于所有二维运动方向均适用,扩展了相位变化计算的范围;然而其相位计算结果仍有一定误差,需要对其进行补偿。
27、作为本发明的一种改进,所述步骤s4中基于随机梯度下降的相位迭代补偿方法,具体过程为:
28、s41:随机梯度下降的参数三个输入:初始参数δφ′n(t)和δφ′n(t-1),即本次迭代补偿的相位变化计算结果δφ’n(t),以及前一次迭代补偿的结果δφ’n(t-1),n=1,2,...,n;下降步长l;方向参数r;
29、s42:距离估计是解算两个相邻迭代过程之间的实际相位变化结果的欧氏距离,距离s计算方法如下式:
30、
31、梯度计算是解算相邻迭代过程间实际相位补偿结果的差值,梯度g的计算方法如下式:
32、
33、s43:随机下降是通过将下降步长l、方向参数r、距离s和梯度g这四个输入参数相结合,计算得出下一个迭代过程的相位初始值δφ'n;
34、首先计算出下降步长:
35、
36、然后根据下式确定方向:
37、
38、其中,rand()生成(0,1)范围内的随机数;
39、最终计算得到下一次迭代的输入相位变化值δφ′n:
40、δφ′n(t+1)=δφ′n(t)+d(δφ′n(t))ln
41、最终迭代在达到精度要求设定的收敛阈值时停止;据此可得到精确的运动相位值。
42、作为本发明的一种改进,所述步骤s5中的运动物体相位提取与展开方法,具体过程为:
43、s51:采集的12幅运动变形条纹图像光强如下式:
44、in(x-δxn,y-δyn)=c+dcos(ωy+φ(x,y)+δφ′n)
45、式中,in(x,y)是第n步的相移图像在(x,y)处的灰度值;c和d分别代表环境光强度和条纹的光照强度;ω为条纹角频率;φ(x,y)是调制后的相位;δxn和δyn表示被测物体在拍摄的第n幅图像上相对于初始位置的x方向和y方向像素位移,可通过步骤s2求得;δφ′n为相移法第n步的运动相位,可通过步骤s4求得,其中n=1,2,...,n;
46、s52:分别对三种不同周期的运动条纹图像采用相移法进行相位提取,对包裹相位进行相位展开,投影三组周期分别为t1、t2、t3(24/26/28)的图像;对其进行两两外差操作最终可以计算出绝对相位分布;计算的绝对相位可用于后续的同名点匹配和三维重建工作。
47、与现有技术相比,本发明的有益效果是:
48、解决了运动场景下的条纹相位计算问题,测量结果精度高;改进了基于质心跟踪的运动信息计算方法,提升了物体像素位移的计算精度;借助基于投影仪坐标系的相位计算方法,克服了物体运动方向受限的劣势,扩展了相位变化计算的范围;通过提出随机梯度下降的迭代补偿方法,提升了相位迭代算法的速度和精度,得到了高精度的运动相位值。
本文地址:https://www.jishuxx.com/zhuanli/20240911/292251.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表