一种航天器自适应调节动态避障精度的轨迹规划方法
- 国知局
- 2024-09-11 14:56:59
本发明属于航天器近距离轨迹规划,具体涉及一种航天器自适应调节动态避障精度的轨迹规划方法。
背景技术:
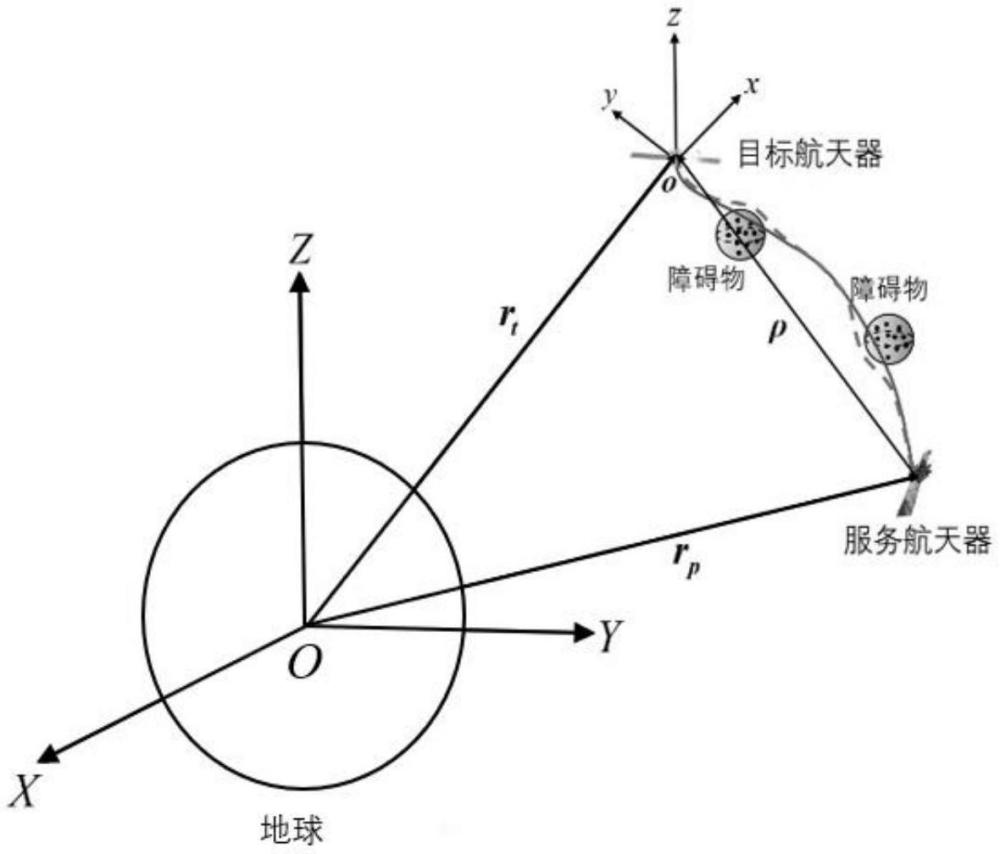
1、过去几十年来,随着航天器技术的发展,空间中碎片和航天器数量急剧增加,这对于航天器的在轨飞行安全造成极大的威胁,因此包含避障的相对运动轨迹规划是空间近距离操作的关键技术之一。对动态障碍物的规避约束会加剧航天器运动的非凸性和复杂性,同时航天器轨道转移任务具有快速性要求,由于星载计算能力的限制,使得在线轨迹规划十分困难。本发明聚焦于如何提升凸优化在航天器动态避障轨迹规划问题中的快速性和避障精确性开展研究。
2、航天器避障轨迹规划方法可以大致分为三类:基于计算碰撞概率的方法、基于添加人工势函数的方法和基于数值优化的方法。p.r.patera等人基于碰撞概率在航天器碰撞预警方面提出了较为成熟的理论,并且进一步从碰撞概率的角度设计避障机动策略;国内的研究者在此基础上对线性和非线性模型的碰撞概率计算函数进行了深入研究。该类方法的计算精度受到模型限制,而且可靠性和置信度需要进一步研究,并且无法实时地计算碰撞概率。
3、人工势函数的方法首先由khatib提出并应用在地面机器人的路径规划上,后来zeng将其应用在航天器规避空间目标的轨迹规划任务中,lin等通过势函数构造最优控制问题,提出一种能够保证航天器碰撞避免并且能够以最优性能指标跟踪参考轨迹的方法,liu等人利用apf解决了对非合作目标航天器的自主交会对接任务。人工势函数方法计算量小,实时性好,避障轨迹平滑,而且具有较高的工程应用价值。但是当力场参数选择不恰当或者在障碍物周围发生抖震而陷入局部最优点时,会导致避障失败。此外,人工势场法不具备寻优功能,生成的路径虽然可以实现避障,但不一定是最优避障路径。
4、基于数值优化的方法是将避障轨迹规划问题转化为多约束条件下的最优控制问题(ocp)。由于凸优化具有在较短时间内收敛到最优解的优势,因此常被用来解决航天应用中的轨迹规划问题。但是在实际的工程应用中,大多数的问题都不具备凸的形式,尤其是由于非线性动力学模型和避障约束带来的非凸性。因此将非凸问题转化为能够适用于在凸优化框架下求解的模型,是更好地使用凸优化技术的一个前提。典型的例子包括将凸优化应用于行星进入问题,小行星着陆问题,航天器在开普勒轨道上的交会和接近操作问题以及编队重构问题。将原始ocp转化为一系列近似的凸子问题并通过迭代逐步逼近原问题的过程叫做序列凸优化(scp),当迭代解收敛时scp过程的近似子问题将和原问题相等,并且可以输出唯一最优解。因此很多针对包含非凸约束的ocps求解方法都建立在了scp的基础上,liu和lu在文献[16]中提出一种利用二阶锥规划逐次求解包含非凸约束ocp的方法,证明了scp迭代解与原始问题karush-kuhn-tucker(kkt)解的等价性,但是后来的研究表明scp迭代的可行性和收敛方向在很大程度上受到初值影响,较差的初值可能会导致迭代子问题与原始问题存在较大偏差,从而导致迭代中断。因此为了降低初值对scp算法的影响,mao等人首先在scp框架内加入了惩罚函数,然后在原始约束中加入虚拟控制变量并将其在性能指标中进行惩罚来避免凸化处理导致的不可行性,只要迭代解被限制在一个良好的信任域内就可以保证scp的收敛。此外,由于凸优化是一种直接法,因此需要对其进行离散化处理。目前用于将凸优化中的动力学方程进行离散化的方法包括零/一阶保持法、经典的runge-kutta法和全局伪谱法。这些方法中除了(自适应)伪谱法外,其他方法在凸优化中都采用均匀离散化,而离散点越密集精度越高,但是优化的变量也会显著增加,所以有必要引入离散点自适应调整策略。
5、文献中的研究虽然能够在一定程度上解决航天器避障轨迹快速规划问题,但是文献中的人工势函数方法和基于碰撞概率的方法都无法保证轨迹的最优性;此外,凸优化方法在求解时采用的是均匀离散化方式,这样可能会导致无法保证避障安全性或求解速率较慢的问题;最后,利用序列凸优化的文献最终都被发现对初值敏感或迭代不可行的问题,这与凸优化方法对初值不敏感的优势相违背。这些问题都会使得轨迹规划问题的在线求解存在困难。
技术实现思路
1、为解决上述技术问题,聚焦于使用凸优化方法解决空间近距离固定时间轨道转移过程中对动态障碍物规避约束下的快速轨迹规划问题,本发明结合lqr、人工势函数和凸优化方法提出一种航天器自适应调节动态避障精度的轨迹规划方法,能够实现高避障精度轨迹的快速求解。
2、为达到上述目的,本发明采用如下技术方案:
3、一种航天器自适应调节动态避障精度的轨迹规划方法,包括以下步骤:
4、步骤1、设计基于事件触发的初始可行轨迹快速生成方法,以快速确定离散点调整区间以及为凸优化提供良好的初值;
5、步骤2、设计避障区间内离散点自适应调整的方法,以提高避障精度以及保留求解效率;
6、步骤3、设计针对复杂非凸动态障碍物规避约束的近似凸化方法,以提高凸优化方法在航天任务应用中的可行性和鲁棒性。
7、有益效果:
8、(1)本发明提出的基于lqr与apf相结合的动态避障方法能够在很短时间内一次生成可行的轨迹,这有利于星上的自主轨迹规划。
9、(2)本发明考虑了根据航天器实时获取动态障碍物的信息来生成碰撞决策信息,同时满足视线角约束和位置约束时才认为有碰撞风险,并且设计的离散点自适应调整策略充分利用了这一信息,能够保证避障安全性以及求解快速性。
10、(3)本发明考虑到了序列凸优化对初值敏感以及迭代不可行问题,通过引入饱和函数和惩罚机制来降低了对初值的敏感度以及提高了收敛速度,使得凸优化对初值不敏感的优势得到保留。
技术特征:1.一种航天器自适应调节动态避障精度的轨迹规划方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种航天器自适应调节动态避障精度的轨迹规划方法,其特征在于,所述步骤1包括:
3.根据权利要求1所述的一种航天器自适应调节动态避障精度的轨迹规划方法,其特征在于,所述步骤2包括:
4.根据权利要求3所述的一种航天器自适应调节动态避障精度的轨迹规划方法,其特征在于,所述步骤3包括:
技术总结本发明提供一种航天器自适应调节动态避障精度的轨迹规划方法,包括:首先给出一种基于事件触发的初始可行轨迹快速生成方法,以快速确定离散点加密区间以及为凸优化提供良好的初值;然后设计一种避障区间自适应调整步长的方法,以提高避障精度以及保留求解效率;最后给出一种针对复杂非凸动态障碍物规避约束的无损凸化方法,以提高凸优化方法在航天任务应用中的可行性和鲁棒性。本发明考虑到了序列凸优化对初值敏感以及迭代不可行问题,通过引入饱和函数和惩罚机制来降低了对初值的敏感度以及提高了收敛速度,使得凸优化对初值不敏感的优势得到保留。技术研发人员:师鹏,陈宇,郭思远,马力,温昊伟,龚胜平受保护的技术使用者:北京航空航天大学技术研发日:技术公布日:2024/9/9本文地址:https://www.jishuxx.com/zhuanli/20240911/292671.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。