一种湖泊生物群落生态模拟舱
- 国知局
- 2024-09-11 14:58:53
本发明属于人工生态环境模拟,具体是一种湖泊生物群落生态模拟舱。
背景技术:
1、湖泊生态系统是流域与水体生物群落、各种有机和无机物质之间相互作用与不断演化的产物。与河流生态系统相比,流动性较差,含氧量相对较低,更容易被污染。湖泊生态系统由水陆交错带与敞水区生物群落所组成。湖泊生态系统具有多种多样的功能——调蓄、改善水质、为动物提供栖息地、调节局部气候、为人类提供饮水与食物等。
2、湖泊生物群落生态模拟舱能在舱内模拟湖泊生态系统的运行,以供实验人员对相应的数据进行研究。
3、现目前的模拟舱在对水生低等生物进行图像采集时使用的仿生机器人大多为一体式结构,但采用一体式结构的仿生机器人可能会出现因为仿生机器人被其他水生低等生物捕食,从而无法继续进行图像采集的情况,为此有必要提出一种湖泊生物群落生态模拟舱。
技术实现思路
1、为了解决上述仿生机器人可能会被其他水生低等生物捕食,导致无法继续采集图像信息的问题,本发明的目的是提出一种湖泊生物群落生态模拟舱,通过水下相机与可食用身体脱离,拍摄可食用身体被消耗的图像信息,得出湖泊生物群落内部、生物群落与环境之间的作用过程,并为研究古湖泊生物群落的组成、结构、动态提供现实依据。
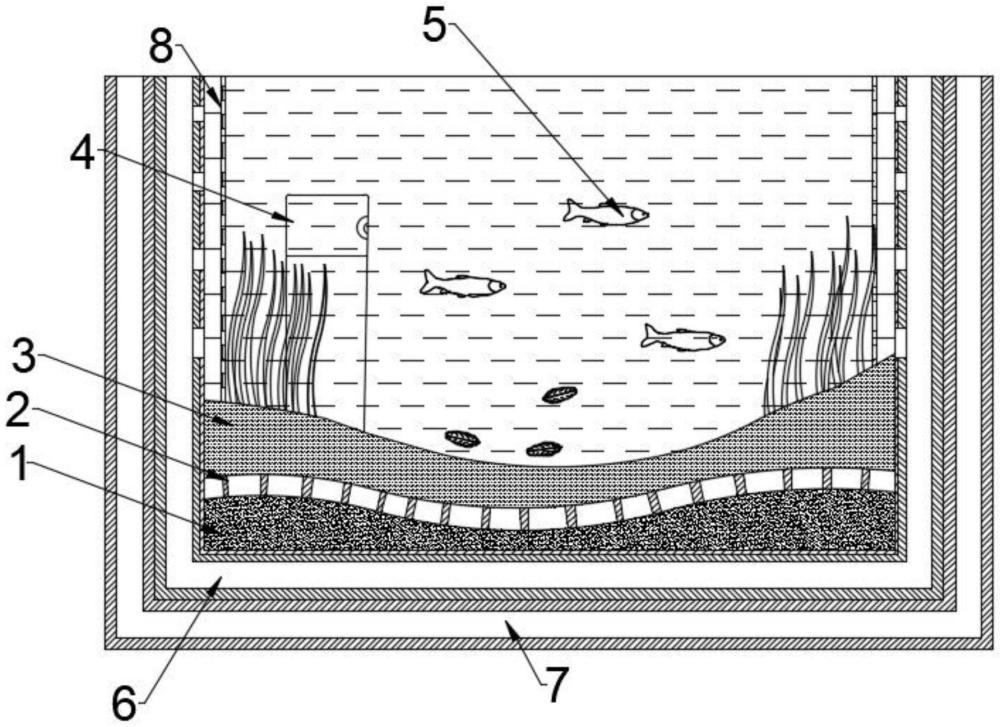
2、为了实现上述目的,本发明的技术方案如下:一种湖泊生物群落生态模拟舱,包括舱体,舱体顶部设有若干led灯,led灯信号连接有控制器,舱体内壁设有温度控制层和流速控制层,舱体底部设有氧气注入层,氧气注入层顶部设有壳体,壳体内部填充有砂石层,砂石层顶部设有生长架,生长架顶部设有淤泥层,淤泥层顶部设有水生层,水生层内部放有若干的检测装置、水生低等生物和仿生鱼。仿生鱼包括智能系统、机械骨架和可食用身体,机械骨架固定连接有水下相机,水下相机与控制器信号连接,机械骨架两侧设有伸缩限位块,可食用身体内壁两侧设有与伸缩限位块对应的限位槽。
3、基础方案的原理是:首先对led灯进行光照调节,模拟太阳的光照,将砂石填充进舱体形成砂石层,并将生长架放置于砂石层上,再将带有微生物和水生植物种子的淤泥填充进舱体中,形成淤泥层,最后向舱体中加入湖水,并将水生低等生物、检测装置和仿生鱼添加进舱中,完成湖泊生物群落生态模拟舱的安装。当仿生鱼即将被捕食时,伸缩限位块收缩,机械骨架与可食用身体脱离,水下相机随机械骨架一同脱离,并继续对可食用身体所涉及水体进行图像采集。
4、基础方案的有益效果是:1.仿生鱼和检测装置能够通过水下相机和水下摄像头对各自所涉及水体内的水生低等生物进行拍摄,相较于只通过水下摄像头对水生低等生物进行拍摄,水下相机通过和仿生鱼一同移动,能调整水下相机与水生低等生物之间的距离,进而提升拍摄精度。
5、2.伸缩限位块的设计,使得仿生鱼的可食用身体与机械骨架可以脱离,减少了因水生低等生物在捕食仿生鱼的过程中将机械骨架一同吞食的可能性。
6、3.机械骨架在脱离后,仿生鱼可食用身体会留在原处,此时可食用身体被水生低等生物捕食的可能性会更高,进而减少了机械骨架被水生低等生物捕食,从而导致水下相机被水生低等生物吞下,从而不能拍摄的情况。
7、4.水下相机和机械骨架固定连接的设计,使得在机械骨架脱离可食用身体后能拍摄到可食用身体被捕食的图像信息,进而判断仿生鱼种的被捕食关系。
8、5.机械骨架的重量相较于可食用身体更重,从而使得机械骨架在与可食用身体脱离后能够迅速与可食用身体分开,减少被捕食的可能性。
9、6.机械骨架脱离可食用身体后,通过机械骨架的游动可控制机械骨架自身的掉落速度,便于水下相机更清晰地拍摄到可食用身体被捕食的图像信息。
10、进一步,检测装置包括智能系统、温度传感器、二氧化碳检测器、氧含量检测器和水下摄像头,温度传感器、二氧化碳检测器、氧含量检测器和水下摄像头均与控制器信号连接,温度控制层包括加热水泵,加热水泵连通有加热装置,加热装置连通有升温管道,加热装置和加热水泵均与控制器信号连接。
11、基础方案的原理及有益效果是:温度传感器、二氧化碳检测器、氧含量检测器能对舱体内的温度、二氧化碳含量和氧含量进行实时检测,便于工作人员对舱内情况进行调控;水下摄像头能够对所涉及的水体进行图像采集;智能系统能够对水下摄像头所采集到的图像信息进行处理。当舱内温度过低时,温度传感器发送温度输入信号到控制器,此时控制器会发送温度输出信号到加热水泵和加热装置,由加热装置对湖水进行加热,并通过加热水泵将热水送入升温管道,对舱体进行升温。
12、进一步,氧气注入层连通有换气泵,流速控制层连通有流速水泵,换气泵和流速水泵均与控制器信号连接。
13、基础方案的原理及有益效果是:当氧含量检测器检测到水体中氧含量不足时,换气泵开始运作,对水体内部进行换气操作,同时换气泵的工作效率高,能够实现能量的有效利用;流速水泵能模拟不同情况下湖水的流速,带给水生低等生物更适宜的生活环境。
14、进一步,仿生鱼机械骨架底部设有配重块,且仿生鱼机械骨架上设有速度传感器,速度传感器与控制器信号连接。
15、基础方案的原理及有益效果是:配重块的设计,能使得仿生鱼骨架顶部的水下相机的拍摄角度能够根据仿生鱼骨架进行调整,从而处于能够拍摄到目标水体的状态;速度传感器的设计,使得当其他水生低等生物快速靠近仿生鱼时,控制器能收到速度输入信号,进而控制仿生鱼骨架与可食用身体进行脱离。
16、进一步,智能系统包括采集模块、分析模块和判断模块。
17、基础方案的原理及有益效果是:采集模块通过采集模块对鱼类图像信息进行采集,并将采集到的鱼类图像信息发送到分析模块,由分析模块根据采集到的鱼类图像信息进行各水下相机或水下摄像头拍摄到的水生低等生物的出现频率,最后交由判断模块进行不同水生低等生物生态位的判断。
18、进一步,采集模块,用于对水生低等生物图像的拍摄,并将拍摄到的图像信息传递到控制器中,采集模块与水下相机和水下摄像头信号连接。
19、基础方案的原理及有益效果是:通过各个水下相机和水下摄像头分别进行采集的操作,使得各单位水体内的水生低等生物能被清晰呈现,减少了因涉及水体过大导致水下相机或水下摄像头拍摄精度降低的情况发生。
20、进一步,分析模块,用于对水下相机和水下摄像头拍摄到的图像信息进行分析处理,以各水下相机或水下摄像头所涉及水体为标准,通过控制器记录各个水下相机或水下摄像头所涉及水体内的水生低等生物出现的频率。
21、基础方案的原理及有益效果是:对每个水下相机或水下摄像头所涉及水体分别进行频率计算的操作,减少了因涉及水体过大导致记录精度降低的情况出现。
22、进一步,判断模块,用于分析各水下相机或水下摄像头所涉及水体中的各水生低等生物的出现频率,以物种为分类标准,进行出现频率由高到低的分类,并与上一次分析得出的数据进行对比,根据水生低等生物出现频率的变化得出各水下相机和水下摄像头所涉及水体内的水生低等生物的生态位。
23、基础方案的原理及有益效果是:将分析模块得出的数据与上一次的数据进行对应比对的操作,能将水生低等生物在单位水体下的出现频率进行直观的呈现,从而根据水生低等生物在单位水体内出现频次的变化进行水生低等生物生态位的推算。
24、进一步,当速度传感器感受到有物体快速接近时,速度传感器向控制器发送速度输入信号,控制器接收到速度输入信号后向限位块发送限位输出信号,限位块解除限位,机械骨架与可食用身体脱离,水下相机和机械骨架一同脱离,并拍摄可食用身体的被捕食的图像信息,得出水生低等生物之间的相互作用关系。
25、基础方案的原理及有益效果是:水下相机和机械骨架一同脱离的设计,使得水下相机能在机械骨架的重量下快速与可食用身体脱离,减少了水下相机被水生低等生物吞下,从而无法继续进行信息采集的可能性。
26、进一步,水下相机和水下摄像头内部均设有报警装置,报警装置与控制器信号连接。
27、基础方案的原理及有益效果是:当水下相机或水下摄像头收到损坏时,报警装置会发送报警信号到控制器,此时工作人员可将发出报警的水下相机或水下摄像头回收,进行维修或更换。
本文地址:https://www.jishuxx.com/zhuanli/20240911/292761.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表