一种基于最优群特征参数辅助的密集目标检测方法
- 国知局
- 2024-09-11 15:00:13
本发明属于信息处理领域,特别涉及雷达检测和跟踪领域。
背景技术:
1、集群目标诸如鸟群、无人机群等通常具有群体智能现象,其表现出不同的群体外形。不同外形对应着不同的群内个体空间分布,因此在雷达视线方向上的相对位置也不同,群内个体之间存在相互干扰。现有公开的文献对集群目标检测的系统性论述较少,目前尚未有统一说法。传统的检测器诸如ca-cfar、go-cfar等无法很好适应集群目标检测这类密集、高动态场景,由遮蔽效应带来的漏检问题时有发生。另一方面,集群目标在运动过程中,群内个体的空间分布位置都是随机的,因此检测时目标峰值出现的位置也是高动态变化的。诸如论文《intelligent cfar processor based on data variability》(smith m e,varshney p k.ieee transactions on aerospace and electronic systems,2000,36(3):837-847.)提出的vi-cfar等自适应类检测器可以自动适应于干扰的变化,在复杂环境背景中具有良好的检测效果。但当干扰目标数目较大时检测性能均会发生下降,未能有效利用群目标空间分布的先验统计知识。
技术实现思路
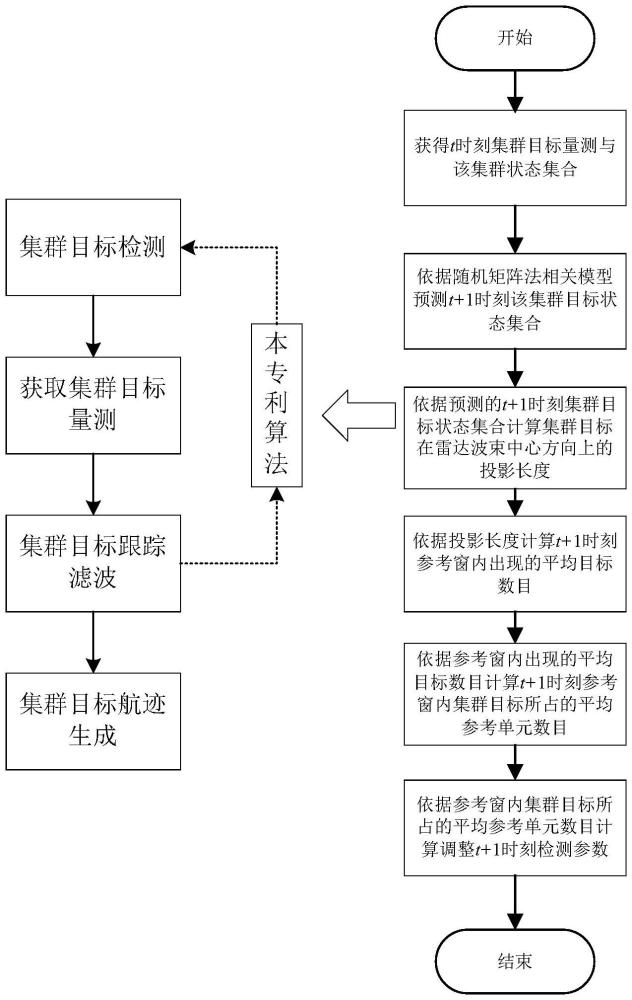
1、为克服集群目标高分辨检测场景下,由于目标散射点数量与密度高度动态变化导致检测器参数失配发生目标漏检的问题,本发明提出了一种基于最优群特征参数辅助的密集目标检测方法。利用随机矩阵法得到集群目标对应的群特征参数信息,并将其用于辅助检测器最优参数的确定,避免因检测参数不适配发生的目标漏检,提高集群目标的检测概率。本发明的技术方案为:
2、一种基于最优群特征参数辅助的密集目标检测方法,包括以下步骤:
3、步骤1.设雷达在一次扫描过程中对回波进行脉冲压缩、恒虚警检测等处理后得到第t个时刻扫描空间内的集群目标一组有效量测集合zt={z1,z2,…,zk},其中zj(j=1,2,…,k)是第j个目标的状态向量,包括目标的位置、速度、加速度等信息。该量测可有效建模为其中,为t时刻集群编号为i的状态集合(增广项),表示该集群的量测率,表示该集群的质心状态向量,为一随机矩阵,表示该集群的扩展状态;
4、步骤2.计算t+1时刻的集群目标的状态随机矩阵法将量测集合建模为ggiw(伽马高斯逆威沙特)分布,在t时刻的预测分布可以表示为:
5、
6、上式中,各项被表示为:
7、
8、
9、
10、其中,νt+1∣t和vt+1∣t由下式给出更新:
11、νt+1∣t=2d+4+e-t/τ(νt∣t-2d-4)
12、
13、其中,t表示预测时间间隔,τ为设计参数,表示时间衰减常数,d表示维度;
14、步骤3.利用预测的t+1时刻集群状态计算t+1时刻集群目标在雷达波束中心方向上的投影长度,以此预测t+1时刻集群目标在距离维度上的分布范围。假设雷达位于坐标原点,其波束中心指向椭球的质心。可表示质心向量,设为椭球最长半轴方向上的向量。假设距离单元长度为δr,投影的长度可以被表示为:
15、
16、其中,||·||2表示2-范数,·表示hadamard积。其中lo与可以通过对进行特征值分解得到:
17、
18、其中o2表示最大特征值,而lo∝o,实际使用中取lo=3o。
19、步骤4.由量测率与量测率调整系数δγ可以进一步等比例折算参考窗内出现的平均目标数目nav,具体步骤如下:
20、步骤4-1.计算量测率调整系数δγ,δγ的计算与t时刻和t-1时刻的标准化的量测点迹的ospa值有关,即:
21、
22、其中,表示t时刻标准化的量测点迹,具体而言:
23、
24、门限值θ刻画该时刻量测与上一时刻的相似度,门限值以下表明相邻时刻量测仅在空间相对位置上存在一定差异,数量相对稳定。
25、对于给定的随机有限集x和y,x和y之间的p阶ospa距离dp,c(·,·)的计算方式如下:
26、
27、其中阶参数p反映了dp,c(·,·)对于误差值的敏感性,而截断参数c则决定了dp,c(·,·)对漏检与虚假目标的惩罚距离。
28、步骤4-2.按照如下方式计算参考窗内出现的平均目标数目nav:
29、
30、其中n为检测器的参考窗长,pl为步骤3中计算的投影长度;
31、步骤5.计算t+1时刻在参考窗内集群目标所占的平均参考单元数目。由于处理目标实际场景的过程中会高分辨一维距离像进行插值使其平滑,假设每个目标所占的平均参考单元数目为η,t+1时刻参考窗内集群目标所占的平均参考单元数目ψ由下式计算:
32、
33、其中,表示向上取整。
34、步骤6.利用预测的t+1时刻参考窗内集群目标所占的平均参考单元数目计算t+1时刻os-cfar的最优检测参数k′:
35、
36、其中,
37、
38、
39、其中,为门限阈值的期望,为参考窗内门限阈值的概率密度函数,αos为乘积因子,阈值为门限阈值,qm(a,b)为marcum q函数,β为指数分布参数,λ为非中心χ2分布的非中心参数,ξ为目标在参考窗内所占的参考单元数目,k为os-cfar检测器的排序参数,图2为os-cfar检测器算法示意图。
40、将步骤5中得到参考窗内集群目标所占的平均参考单元数目ψ代入,令ξ=ψ,计算得到对应的检测参数k′。
41、本发明具有如下有益效果:
42、(1)本发明通过将随机矩阵法得到集群目标的特征信息用于辅助集群目标检测参数的确定,提高集群目标探测过程中的检测性能;
43、(2)本发明不需要更改现有的雷达数据处理结构。计算集群目标特征信息和最优检测参数的步骤并未改变数据维度,因此本专利可以在不改变现有雷达数据处理结构的前提下用于群目标的检测跟踪流程中。
技术特征:1.一种基于最优群特征参数辅助的密集目标检测方法,其特征在于,包括如下步骤:
2.如权利要求1所述的方法,其特征在于,基于随机矩阵法的群滤波将集群目标量测集合建模为ggiw(伽马高斯逆威沙特)分布,其在t时刻的预测分布可以表示为:
3.如权利要求1所述的方法,其特征在于,对于集群目标在雷达波束中心方向上的投影长度,其计算方式为:
4.如权利要求1所述的方法,其特征在于,参考窗内集群目标所占的平均参考单元数目ψ的计算方法为:
5.如权利要求4所述的方法,其特征在于,量测率调整系数δγ的计算方法为:
6.如权利要求1所述的方法,其特征在于,利用平均参考单元数目计算确定下一时刻的检测参数k′的计算方法为:
技术总结本发明公开了一种基于最优群特征参数辅助的密集目标检测算法;可用于集群目标检测跟踪处理流程,可有效利用群特征参数辅助确定检测器的最优参数,减少了现有技术手段对集群目标进行检测时产生的漏检。本发明首先根据当前时刻的集群目标量测确定该时刻的集群状态集合,基于随机矩阵法相关模型预测下一时刻的集群状态集合,然后利用下一时刻的集群状态集合计算集群目标在雷达波束中心方向上的投影长度,并依此计算参考窗内集群目标所占的平均参考单元数目,最后利用平均参考单元数目计算确定下一时刻的检测参数;本发明利用实测数据验证了其有效性,克服了现有技术手段中未能有效利用集群目标空间分布先验统计知识的弊端,提升集群目标的检测概率。技术研发人员:王锐,姜琦,史孟鑫,窦立斌,李卫东,胡程受保护的技术使用者:北京理工大学技术研发日:技术公布日:2024/9/9本文地址:https://www.jishuxx.com/zhuanli/20240911/292829.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表