一种船用可收放弹簧摆翼增推装置及设计方法
- 国知局
- 2024-09-14 14:31:42
本发明涉及船舶节能,具体地说是一种船用可收放弹簧摆翼增推装置及设计方法。
背景技术:
1、众所周知,摆翼推进器是一种模仿水下鱼的游动而发明的仿生水下推进器结构,当有外力驱动其升沉运动时,摆翼能够形成适当的迎角,产生推力,因而可以用于波浪中航行船舶的增推。即,将摆翼安装于船首水下处,当迎面来浪时,船体产生纵摇和垂荡,带动摆翼升沉运动,产生推力。
2、目前人们对摆翼推进器的研究已经颇深,时至今日,摆翼推进器已经发展了许多形式,如主动式复合运动摆翼、柔性翼摆、半主动式摆翼、串列摆翼及三维结构摆翼等。研究者们通过展开大量的实验数值研究,探索摆翼推进器高效率的机理。摆翼按自由度又可分为单自由摆翼和两自由度摆翼,其中,两自由度摆翼需要同时控制摆动运动和转动运动,机构较难实现;单自由度摆翼仅需控制摆动运动,因而机构更易实现。弹簧约束俯仰运动的摆翼,即半主动摆翼,就是一种单自由度摆翼,机构易于实现。
3、值得注意的是,摆翼的类型、船舶的类型以及安装在船舶的位置都会影响摆翼的工作效率,如何便捷地将摆翼安装在船舶上,以及如何根据船舶及其航行海况设计合适的摆翼,实现摆翼效率和推力系数的最大化,是摆翼增推工程应用的重要问题。
技术实现思路
1、本发明的目的是解决上述现有技术的不足,提供一种结构简单、推进效率高、机动性高、单自由度、启动推力大的船用可收放弹簧摆翼增推装置及设计方法。
2、本发明解决其技术问题所采用的技术方案是:
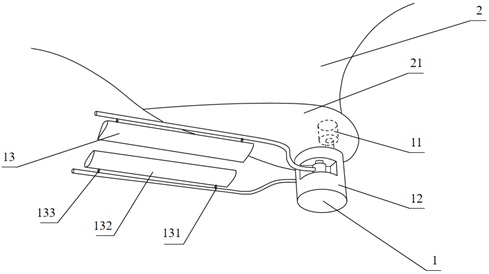
3、一种船用可收放弹簧摆翼增推装置,其特征在于该摆翼增推装置包括筒体、驱动电机、水翼组件、传动系统,所述的水翼组件包括支撑架、摆翼和弹簧,传动系统包括驱动齿轮、从动齿轮、对转轴、对转齿轮、轴承,所述的筒体内部下端经轴承与两个竖直的对转轴转动连接,两个对转轴的下部分别固定连接对转齿轮,两个对转齿轮相啮合,其中一个对转齿轮的上方的对转轴上连接从动齿轮,从动齿轮与筒体内的驱动齿轮啮合,驱动齿轮固定在驱动电机的输出轴上,驱动电机固定在筒体或船体上,所述的筒体侧面设有窗口,支撑架设有两个,两个支撑架的一端分别与两个对转轴连接,支撑架的另一端通过筒体的窗口伸出,伸出筒体的支撑架的内侧分别经弹簧连接摆翼。
4、本发明所述的弹簧的两端分别设有内连接套和外连接套,外连接套固定在支撑架上,内连接套固定在摆翼上,弹簧的两端分别插入内连接套和外连接套内与内连接套和外连接套固定连接。
5、一种船用可收放弹簧摆翼增推装置的设计方法,其特征在于设计方法的步骤如下:
6、(1)、确定海况和船舶参数:确定船舶的船长l、航速v、船宽bv、弹簧摆翼增推装置的安装位置到船体重心的距离y,根据船舶的航行海况确定航行海况的波浪条件的波长λ、波幅a、波浪圆频率ω、航向线与来流方向夹角β;
7、(2)、确定弹簧摆翼增推装置的工作范围:根据海况主要波长λ、船长l确定弹簧摆翼增推装置的工作范围,即λ/l∈[0.8~2.0],在此波浪条件下,船体有明显的纵摇和垂荡运动,此时打开摆翼,波浪减阻增推效果最为明显,对于其他情况可收起摆翼;
8、(3)、确定摆翼的进速系数j:根据上述步骤(1)中的参数,当船舶以偏浪角β航行时,求得(λ/cosβ)/l,通过查找船舶在波浪中的垂荡振幅图像和船舶在波浪中的纵摇摆幅图像得到z0/a和θl/2a,由此可得到z0和θ,根据航海实践可知,在该适配海况下,船舶垂荡达到最大幅值时即是当船首达到波浪最高点时,因此,此时的实际的船舶重心位置的垂荡幅值为则摆翼的升沉幅度z可由公式计算,即即得到升沉幅度z,则此时摆翼的垂荡高度b=2z,根据公式f=ω/(2π)得到波浪频率f,再根据公式c=f·λ,得到波速c,进而得到摆翼的遭遇周期其中,v·cosβ为船舶航速在顶浪方向上的分量。根据进速系数表示式j=v/(fe b)得,此时摆翼的进速系数j;
9、(4)、确定摆翼的弦c长、展长h、弹簧刚度系数k’及摆翼的推力系数kt
10、和预计产生的平均推力tave:设计摆翼的弦长c的取值范围应满足设计要求z/c∈[1.0~3.0],由上述步骤(3)得到z,对c进行取值,满足上述设计要求;
11、设计摆翼的展长h的取值范围应满足设计要求h/c∈[2.0~4.0],取h,满足设计要求;
12、设计弹簧刚度k应满足弹簧刚度系数k’的取值范围,其应满足设计要求k’∈[0.8~2.0],取k’,根据上述步骤(3)得到b,再由公式k=k’[ρ(fe b)2(b h)
13、c],其中当前海水密度ρ,得到k,满足上述设计要求;
14、当满足上述设计要求范围内时,即h/c∈[2.0~4.0]、z/c∈[1.0~3.0]、k’∈[0.8~2.0],根据推力系数kt与进速系数j拟合曲线公式如下:
15、kt(j)=
16、0.71159-0.46541j+0.26749j2-0.06474j3+0.00736j4-(3.99767e-4)j5+(8.36436e-6)j6,在j取步骤(3)中数值时,求得kt;
17、顶浪航行时,由公式tave=ktρ(fe b)2(b h)得,摆翼产生的平均推力大小为tave,由于弹簧摆翼增推装置是由两片摆翼构成,则该装置产生的总平均推力约为t=2tave;
18、(5)、确定弹簧摆翼增推装置的技术参数:设计摆翼展长h的满足2c≤h≤bv,步骤(4)中确定了展长h,该展长h的取值在上述范围内,不需要二次设计,若不在上述范围内,需要二次设计,在适用海况条件确定时,通过控制弦长c,来调整升沉比z/c,在满足设计要求范围z/c∈[1.0~3.0]内,根据展弦比h/c的设计要求范围h/c∈[2.0~4.0],对弦长c和展长h进行调整,以此来对装置进行优化,使得装置获得较大的推力tave;
19、设计筒体的横截面直径d的取值范围应满足d<bv/2,确保给摆翼的展长h
20、设计预留足够的空间,若安装在球鼻艏位置,则筒体的横截面直径d的设计应当小于球鼻艏宽度,取d的值;
21、从工程结构强度角度出发,对转轴和传动系统的设计应满足摆翼的受力要求,设计摆翼在竖直方向最大承受力系数kfz=20,设计摆翼在工作状态下,在竖直方向最大承受力fz由公式fz=kfzρ(fe b)2(b h)确定,得到fz,则对于对转轴和传动系统的设计应满足其能够在竖直方向承受至少fz大小的力;
22、设计摆翼支撑架的首端到末端的水平距离l的取值范围应1.25h≤l≤bv,以保证摆翼支撑架有足够的空间安装摆翼,并且在装置完全展开工作时不至于过宽,对l取值;
23、设计摆翼支撑架的型宽度b的取值范围应满足设计要求且2c<d0+2b<bv,即c-d0/2<b<(bv-d0)/2,其中d0为左右两根对转轴之间的水平距离,且d0=d/2,这样即保证装置在收起时两摆翼支撑架前段横杆间的距离(d0+2b)大于两个摆翼的总弦长2c,以容纳摆翼,又保证小于船舶型宽bv,不影响船舶正常航行,进而对b取值;
24、(6)通过修改摆翼尺寸实现推力的优化:在适用海况条件及适用航行器性能确定时,根据平均推力公式tave=ktρ(fe b)2(b h)可知,通过控制弦长c,来调整升沉比z/c,在满足设计要求范围z/c∈[1.0~3.0]内,根据展弦比h/c的设计要求范围h/c∈[2.0~4.0],对弦长c和展长h进行调整,在弹簧刚度系数k’的设计要求范围[0.8~2.0]内,再通过调整弹簧刚度k,以此对装置进行二次设计,使得本装置在限定范围内获得更大推力系数kt,进而获得较大推力,因此,在优化时可根据应用船舶的航速性能及适用海况,确定合适的参数。
25、本发明由于采用上述结构,具有结构简单、推进效率高、机动性高、单自由度、启动推力大等优点。
本文地址:https://www.jishuxx.com/zhuanli/20240914/294575.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。