一种水体中实时控制拖鱼离底高度的系统及方法与流程
- 国知局
- 2024-09-14 14:24:19
本发明涉及海底废弃井口或海底埋藏通信电缆测量,尤其是涉及一种水体中实时控制拖鱼离底高度的测量系统及方法。
背景技术:
1、目前,在海洋工程海底废弃井口或海底埋藏通信电缆测量中,使用海洋磁力梯度仪和海洋磁力仪等设备,能够测量海底埋藏的废弃井口、海底电缆、海底管道、人类遗弃的金属障碍物等。在测量中保持拖鱼的离底高度稳定性是保证测量数据质量的重要前提。目前在近海测量中无法使用带自动控制拖曳系统的专业调查船,通常使用20m-30m的小型调查船。现有的控制拖鱼离底高度主要是通过控制船速和人工收放铠装电缆长度,虽然能控制拖鱼的离底高度,但是拖鱼离底高度变化较大,不能根据海底地形和坡度实时动态稳定的控制拖鱼的离底高度。其中的不足有:
2、(1)在海洋工程调查中走航式测量时,海洋磁力梯度仪和海洋磁力仪的水下拖鱼与调查船通过电缆柔性连接,调查船加减速时带动水下拖体上下起伏运动,其拖鱼的离底高度变化较大;在现场应用中存在因电缆释放过长拖鱼触碰海底,导致拖鱼损坏;若拖鱼入水浅,采集的数据精度较差,无法达到甲方规定的技术需求;
3、(2)控制拖鱼离底高度的装置结构复杂,需要多装置相互配合;并且拖鱼的入水深度受托体重量、地形、坡度和电缆的长度的影响很大,海流流速较大时,拖鱼的离底高度变化较大,数据质量变差;
4、(3)在海洋工程调查中走航式测量时,海洋磁力梯度仪和海洋磁力仪的水下拖鱼与调查船通过缆绳柔性连接,测量区域内存在漂浮的渔网,拖鱼被渔网缠住,加大了海上测量的难度,降低了采集数据的精度。
技术实现思路
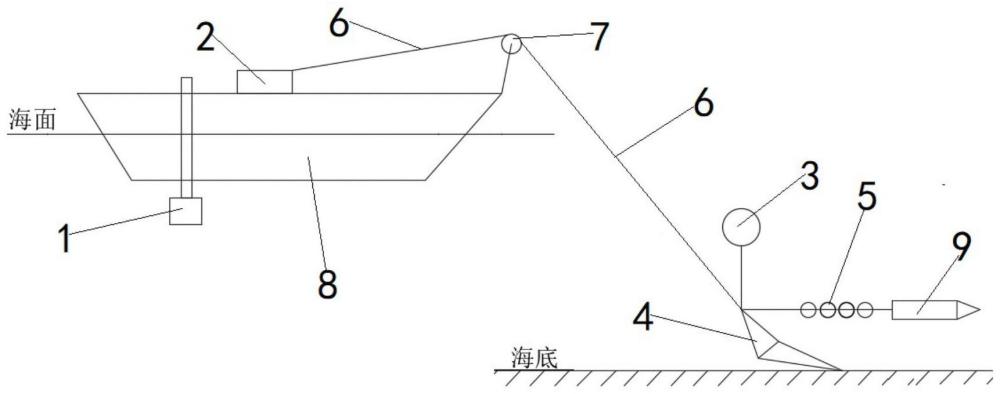
1、针对现有技术存在的不足,本发明一方面提供一种水体中实时控制拖鱼离底高度的系统,包括:
2、多波束测量系统,其设于船体底部,用于测量拖鱼航经路线的水
3、深
4、及地形,并实时记录数据;
5、电动绞车,其设于船体上,其依据多波束测量系统记录的数据来
6、实
7、时控制其连接的铠装电缆的收放长度,所述铠装电缆的自由端连接拖体;
8、浮体,其连接于所述铠装电缆上,用于给提供一个向上的浮力;
9、配重块,其连接于所述铠装电缆上,其连接所述铠装电缆的位置
10、与所述
11、浮体的连接位置紧挨,用于提供一个向下的重力;
12、配重环,其套设于所述铠装电缆的自由端,并紧邻所述拖体设置。进一步地,所述配重环、所述配重块及所述浮体均由无磁性材料
13、制
14、成。具体而言,通过设置的多波束测量系统的实时数据反馈可及时通过电动绞车调整铠装电缆的放线速度及角度,通过设置的配重环、配重块及浮体,可以使拖体的各个方向的受力保持相对平衡,从而在水体中穿梭时保持相对稳定的速度、减少了摆动幅度过大的情况。
15、进一步地,所述电动绞车还配套设置支架;所述支架设于船体尾部,用于配合所述电动绞车控制所述铠装电缆的收放角度。具体而言,通过设置的支架,能够控制铠装电缆的收放角度。
16、优选地,所述支架为a形架,a形架包括底座、定滑轮、横撑及支撑臂;所述底座设置在船体尾部,所述支撑臂包括两个、设置在所述底座上,所述横撑的两端分别连接一个所述支撑臂,所述定滑轮与横撑相连接;其中,铠装电缆穿过定滑轮放入水体中。
17、进一步地,所述配重环包括两个半圆环;两个所述半圆环上设置螺孔,通过使用螺栓旋拧于所述螺孔能够将两个所述半圆环套设于所述铠装电缆上。具体而言,通过设置的配重环,能够很好的控制拖体入水深度,进一步保证拖体在水中前行时摆动幅度不会太大。
18、进一步地,所述浮体包括依次连接设置的球体、第一绳索及第一连接块;所述球体为空心球体,所述第一连接块上设置第一连通孔,所述铠装电缆通过所述第一连通孔连接所述浮体。具体而言,通过设置的浮体给拖体提供一个浮力,保证拖体在水中不会沉底。
19、进一步地,所述配重块包括依次连接设置的第二连接块、第二绳索及v形配重体;所述第二连接块上设置第二连通孔,所述铠装电缆通过所述第二连通孔连接于所述配重块。具体而言,通过设置的配重块为拖体提供一个向下的力,并配合浮体保持拖体在水体中的平衡。
20、进一步地,所述电动绞车包括底座、轮盘、电机、及排缆器;所述轮盘及所述排缆器并排设于所述底座内,所述电机设于所述底座一侧,并连接于所述轮盘的盘轴;所述排缆器用于电动绞车的自动排缆,并能够避免所述铠装电缆出现乱绳咬绳的问题。
21、进一步地,所述电动绞车还包括滑环;所述滑环设置在所述底座的另一侧,用于收放铠装铠装电缆。
22、进一步地,所述电动绞车还包括电子计米器,其设置于所述底座的一侧;所述计米器与所述轮盘联通设置,用于实时监测铠装电缆线的放缆长度。
23、进一步地,所述电机还连通设置控制器及变频器;所述控制器及所述变频器设置在所述底座一侧,用于控制所述电机的转动速度。
24、进一步地,所述多波束测量系统包括换能器、姿态仪、声速仪、导航定位系统、显示装置,所述换能器、所述姿态仪、所述声速仪、所述导航定位系统与所述显示系统连接,所述导航定位系统采用北斗卫星通信模式进行测线定位,所述显示装置,用于实时显示地形和坡度变化。
25、本发明的有益技术效果为:采用电动绞车、多波束测量系统、无磁性的配重环、浮体及配重块,以及船尾支架和铠装电缆进行相互配合,提供一种水体中实时控制拖鱼离底高度的测量系统,能够有效控制磁力梯度仪的拖鱼在海底保持稳定的离底高度;在4级海况及以下浅水区使用小型调查船进行海底废弃井口或海底电缆调查作业时,能够有效控制磁力梯度仪的拖鱼在海底保持稳定的离底高度,使水下拖鱼测量设备的姿态保持相对稳定,拖鱼上下起伏运动行程在±50cm内,减小坡度和海流对测量数据的影响,可以提高数据测量精度和数据质量,提供更加准确可靠的数据资料。
26、本发明的另一方面,提供了一种水体中实时控制拖鱼离底高度的测量方法,包括:
27、步骤一、安装电动绞车,将电动绞车在船尾和船中分别进行焊接加固,并进行滑环的安装,对铠装电缆进行加工切断,并将铠装电缆通过排缆器缠绕在电动绞车的轮盘上;
28、步骤二、多波束测量系统安装,提前在船侧进行安装,并且对换能器的姿态进行校准;
29、步骤三、支架安装,在船尾和船中分别进行焊接加固,保证铠装电缆和拖鱼收放的安全;
30、步骤四、在拖鱼入水前,距离拖鱼预设距离的铠装电缆处根据水深进行配重环安装,配重环设有预设重量及预设数量,安装预设数量及预设重量的配重块,配重直接卡在缆上;
31、步骤五、拖鱼测量,采用走航式调查的方法进行拖鱼测量,通过观察多波束测量系统,通过通信设备向操作电动绞车的人员提供实时变化的水深、地形和坡度,利用绞车实时收放铠装电缆长度。
32、进一步地,拖鱼测量完成后进行收尾工作,测量完成之后,断电收回铠装电缆,将测量设备提出水面,同时调整电动绞车,使排缆器将铠装电缆缠绕在轮盘上,清洗拖体并进行养护。
33、进一步地,所述步骤四中,距离拖鱼预设深度的铠装电缆处根据水深进行配重环安装,配备预设数量及预设重量的配重环,并直接卡在铠装电缆上。
34、优选地,所述步骤四中,距离拖鱼5m的铠装电缆处根据水深进行配重环安装,配重环每个重2.5kg,共有25个,配重环直接卡在铠装电缆上。
35、进一步地,所述步骤五中,拖鱼测量时,拖体入水深度计算公式为:h=(g/v)*(al+bl2),式中,h为拖体入水深度,单位:m;g为拖体重量,单位:kg;l为拖缆长度,单位:m;v为船速,单位:kn;a为加常数,单位:m;b为乘常数。其中,托体重量g的数值包含拖体本身重量及增加的配重环及配重块的重量。
36、进一步地,所述步骤五中,拖鱼测量时,控制拖体离底高度在3.5~4.5m之间,船速≤4kn,铠装电缆长度≤100m,拖体、配重环及配重块三者的总重量≤100kg。
37、优选地,所述步骤六中,对拖体的养护步骤为:淡水冲洗,晾干,在转动部件、螺栓均匀涂上黄油。具体而言,通过涂抹黄油起到防锈润滑的作用。
38、综上所述,本发明的测量方法的有益技术效果为:采用电动绞车、多波束测量系统、配重块及配重环、支架和铠装电缆进行相互配合,提供一种水体中实时控制拖鱼离底高度的测量方法,能够有效控制磁力梯度仪的拖鱼在海底保持稳定的离底高度。在4级海况及以下浅水区使用小型调查船进行海底废弃井口或海底电缆调查作业时,能够有效控制磁力梯度仪的拖鱼在海底保持稳定的离底高度,使水下拖鱼测量设备的姿态保持相对稳定,拖鱼上下起伏运动行程在±50cm内,减小坡度和海流对测量数据的影响,可以提高数据测量精度和数据质量,提供更加准确可靠的数据资料。
本文地址:https://www.jishuxx.com/zhuanli/20240914/293889.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。