一种爬较大斜坡的光伏清扫机器人的制作方法
- 国知局
- 2024-09-14 14:32:34
本发明涉及光伏清扫机器人的,具体而言,涉及一种爬较大斜坡的光伏清扫机器人。
背景技术:
1、随着经济的蓬勃发展,电力需求持续增长,利用太阳能发电成为可持续且高效的能源解决优选方案,由于沙漠地区具有丰富的太阳能资源、日照时间长,太阳辐射强度高,成为建设光伏发电站的理想场所,但沙漠地区的尘埃污染严重,极大影响光伏组件接受的光辐照量、降低发电量,局部遮蔽还会引起热斑效应、影响组件的寿命,因此在光伏发电站运行和维护中,光伏组件的清扫工作尤为重要。
2、目前的光伏清扫机器人分为主动爬坡和被动爬坡两类,主动爬坡是通过设置履带或轮式行走机构实现爬坡和越障功能,但于履带和轮式行走机构与光伏板表面接触时所能产生的摩擦力存在物理限制,使得此类光伏清扫机器人只能适应于最大倾斜角度不超过15度的光伏组件;被动爬坡是通过设置夹持组件对光伏板上下两侧夹紧卡接,对光伏组件的倾斜角度适应性更强,可用于倾斜角度大于60度的光伏板清扫工作,但此类光伏清扫机器人无法根据光伏板的尺寸和形状灵活地调整夹持组件的间距,且夹持组件在夹紧光伏板的过程中容易对其表面造成一定的划伤和压痕,影响光伏板的使用寿命和发电效率。
3、因此,需要设计一种比主动爬坡的光伏清扫机器人爬坡倾斜角度更大、相对于被动爬坡清扫机器人实现自由爬坡且不损伤光伏板的光伏清扫机器人以解决上述问题。
技术实现思路
1、本发明的目的在于提供一种爬较大斜坡的光伏清扫机器人,以解决上述现有技术的问题。
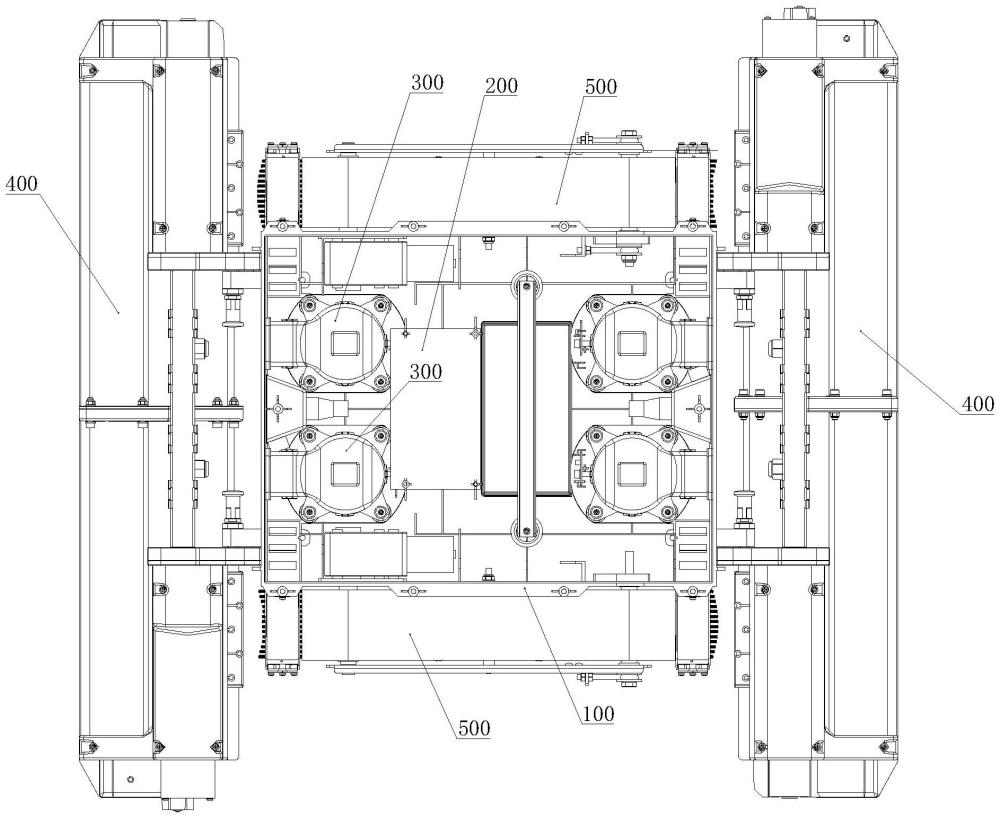
2、为实现上述目的,本发明提供如下技术方案:一种爬较大斜坡的光伏清扫机器人,包括控制单元和设有清扫单元的机体,所述机体通过行走单元行进作业,所述机体上设有若干个由控制单元控制的吸附单元,所述吸附单元包括浮板、用于使浮板与待清扫面产生负压而相吸附的负压风机以及用于检测所述浮板与待清扫面之间吸附状态的气压检测传感器,所述负压风机和气压检测传感器均与控制单元电性连接,所述控制单元根据气压检测传感器提供的检测信号控制负压风机的工作状态,即控制所述负压风机的占空比;所述负压风机的吸入口、浮板与待清扫面形成负压腔,所述负压风机的吸入口与浮板的连接处设有一气腔口,所述气腔口与所述负压腔连通,所述气腔口处安装所述气压检测传感器,用于检测负压腔内的气压。
3、作为本发明的优选技术方案,所述机体包括底座和包覆整个底座的机盖,所述底座上分布有若干个开有贯通孔的凸台,每个凸台上安装一个所述吸附单元;所述凸台的腰部设有台阶,所述负压风机下端的吸入口插装至所述凸台的贯通孔,所述负压风机外壳体搭接并固定在所述台阶上;所述凸台正下方开有安装所述浮板的容置腔,所述容置腔内具有自贯通孔壁往外径向延伸围合形成的环形槽,在所述环形槽与所述容置腔内壁形成的空间顶部均布设有若干导向柱;
4、所述浮板的上部自外向中心分为外层插接部和内层环形腔体,它们之间设有与所述导向柱数量相同、位置相对的安装部,所述安装部设有阶梯通孔,所述导向柱的底端插接至所述阶梯通孔内,通过限位连接件将所述导向柱底端限制在所述阶梯通孔的肩部,所述外层插接部插装在所述容置腔的内壁,所述内层环形腔体顶部插装至所述环形槽内;所述导向柱上套接有弹簧,在负压风机及弹簧作用下,浮板实现上下浮动。
5、进一步地,所述负压腔分为外腔室和内腔室,所述浮板的下部凸缘、底平面与待清扫面围设形成所述外腔室,所述浮板的底平面均布多个通气孔,所述负压风机的吸入口与所述内层环形腔体围合成所述内腔室。
6、进一步地,所述内层环形腔体的顶部设有密封圈。
7、作为本发明的优选技术方案,所述浮板底部外缘面设有缓冲垫。
8、作为本发明的优选技术方案,所述行走单元包括履带、驱动电机以及驱动轮;驱动电机与驱动轮连接,驱动轮与履带连接,并带动履带转动;所述行走单元设有两个,分别设置于所述机体的左右两侧,所述控制单元控制所述驱动轮顺时针或逆时针转动,带动所述履带转动使得所述机体前进或后退。
9、作为本发明的优选技术方案,所述清扫单元设有两个,分别设置于机体前进和后退的两端。
10、作为本发明的优选技术方案,所述机体上设有两个或两个以上的吸附单元。
11、作为本发明的优选技术方案,爬较大斜坡的光伏清扫机器人的控制方法,包括以下步骤:
12、s101初始化设置:启动所述光伏清扫机器人,对每一所述吸附单元的风机占空比进行初始化设置,并设定目标气压值p设;
13、s102气压检测:通过所述气压检测传感器实时检测所述吸附单元的气压值p实;
14、s103判定漏气:对比实时检测得到的气压值p实与设定的目标气压值p设,当某个所述吸附单元的气压值p实低于目标气压值p设,判定该吸附单元漏气;
15、s104漏气响应:当检测到其中一个吸附单元漏气时,则加大其余吸附单元的风机占空比以提高气压至安全阈值;
16、s105漏气报警:当步骤s104的响应在一定时间内仍无法将气压提高至安全阈值,则发出漏气报警;
17、s106动态调整和控制:持续监控所述吸附单元的气压值和负压风机的工作状态,在所述光伏清扫机器人进行剩余清扫任务时,持续重复步骤s102至s105直至完成所有清扫任务。
18、作为本发明的优选技术方案,步骤s103判断漏气的情况具体为遇到缝隙或障碍物的时候。
19、本发明的有益效果是:
20、1、光伏清扫机器人通过在履带爬坡的基础上增设若干个吸附单元提供额外的爬坡支持,使得光伏机器人在爬行过程中重量分布更均匀,减少了在不平坦表面上倾斜或滑动的风险,同时吸附单元产生的负压增加了光伏清扫机器人与工作表面的正压力,增大了履带与工作表面的摩擦力和抓地力,实现在较大斜坡上自由行走和工作,最大爬坡角度可达45度,在太阳能光伏板的最佳放置倾斜角度,即45度的斜坡上实现自由爬坡且不损伤光伏板。
21、2、光伏清扫机器人所设置的若干个吸附单元内均设有气压检测传感器,用于实时检测和反馈吸附单元的气压状态,判断是否存在漏气的情况,控制单元迅速根据检测结果自动调整其余吸附单元的风机占空比,以补偿漏吸附单元的吸附力,确保机器人在光伏板表面的吸附力始终保持在安全水平,防止因漏气导致的跌落或滑动,实现清扫过程的智能控制,减少人工的参与和干预,提高了作业的自动化程度,同时也降低了运维成本和工作强度,通过智能化的实时反馈和调节机制,光伏清扫机器人能够更加高效、可靠地完成清扫任务。
22、3、本发明的光伏清扫机器人利用履带和可升降的吸附单元结合,可以根据不同尺寸的障碍物进行调整吸附单元的高度以实现跨越光伏板之间的缝隙或其他障碍物。
技术特征:1.一种爬较大斜坡的光伏清扫机器人,包括控制单元和设有清扫单元的机体,所述机体通过行走单元行进作业,其特征在于,所述机体上设有若干个由控制单元控制的吸附单元,所述吸附单元包括浮板、用于使浮板与待清扫面产生负压而相吸附的负压风机以及用于检测所述浮板与待清扫面之间吸附状态的气压检测传感器,所述负压风机和气压检测传感器均与控制单元电性连接,所述控制单元根据气压检测传感器提供的检测信号控制负压风机的工作状态,即控制所述负压风机的占空比;所述负压风机的吸入口、浮板与待清扫面形成负压腔,所述负压风机的吸入口与浮板的连接处设有一气腔口,所述气腔口与所述负压腔连通,所述气腔口处安装所述气压检测传感器,用于检测负压腔内的气压。
2.根据权利要求1所述的爬较大斜坡的光伏清扫机器人,其特征在于:所述机体包括底座和包覆整个底座的机盖,所述底座上分布有若干个开有贯通孔的凸台,每个凸台上安装一个所述吸附单元;所述凸台的腰部设有台阶,所述负压风机下端的吸入口插装至所述凸台的贯通孔,所述负压风机外壳体搭接并固定在所述台阶上;所述凸台正下方开有安装所述浮板的容置腔,所述容置腔内具有自贯通孔壁往外径向延伸围合形成的环形槽,在所述环形槽与所述容置腔内壁形成的空间顶部均布设有若干导向柱;
3.根据权利要求2所述的爬较大斜坡的光伏清扫机器人,其特征在于:所述负压腔分为外腔室和内腔室,所述浮板的下部凸缘、底平面与待清扫面围设形成所述外腔室,所述浮板的底平面均布多个通气孔,所述负压风机的吸入口与所述内层环形腔体围合成所述内腔室。
4.根据权利要求3所述的爬较大斜坡的光伏清扫机器人,其特征在于:所述内层环形腔体的顶部设有密封圈。
5.根据权利要求2所述的爬较大斜坡的光伏清扫机器人,其特征在于:所述浮板底部外缘面设有缓冲垫。
6.根据权利要求1所述的爬较大斜坡的光伏清扫机器人,其特征在于:所述行走单元包括履带、驱动电机以及驱动轮;驱动电机与驱动轮连接,驱动轮与履带连接,并带动履带转动;所述行走单元设有两个,分别设置于所述机体的左右两侧,所述控制单元控制所述驱动轮顺时针或逆时针转动,带动所述履带转动使得所述机体前进或后退。
7.根据权利要求1所述的爬较大斜坡的光伏清扫机器人,其特征在于:所述清扫单元设有两个,分别设置于机体前进和后退的两端。
8.根据权利要求1所述的爬较大斜坡的光伏清扫机器人,其特征在于:所述机体上设有两个或两个以上的吸附单元。
9.根据权利要求1至8所述的任一爬较大斜坡的光伏清扫机器人的控制方法,其特征在于包括以下步骤:
10.根据权利要求9所述的爬较大斜坡的光伏清扫机器人的控制方法,其特征在于:步骤s103判断漏气的情况具体为遇到缝隙或障碍物的时候。
技术总结本发明提出了一种爬较大斜坡的光伏清扫机器人,属于光伏清扫机器人领域。本发明的爬坡光伏清扫机器人包括包括控制单元、设有清扫单元的机体和设有若干个由控制单元控制的吸附单元,吸附单元包括浮板、用于使浮板与待清扫面产生负压而相吸附的负压风机以及用于检测浮板与待清扫面之间吸附状态的气压检测传感器。通过在履带爬坡的基础上增设若干个可升降的吸附单元提供额外的爬坡支持,实现在较大斜坡上自由行走和清扫工作,最大爬坡角度可达45度;控制单元根据气压检测传感器实时反馈的信号自动调整其余吸附单元的风机占空比,确保机器人在光伏板表面的吸附力始终保持在安全水平,可实现安全跨越缝隙或障碍物,减少人工的参与和干预。技术研发人员:李孟钦,曹一波受保护的技术使用者:广州创源机器人有限公司技术研发日:技术公布日:2024/9/12本文地址:https://www.jishuxx.com/zhuanli/20240914/294644.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。