无人船与无人机协同导航方法
- 国知局
- 2024-09-14 14:33:23
本发明属于协同导航,具体涉及一种无人船与无人机协同导航方法。
背景技术:
1、无人机与无人船目前已获得广泛应用,特别是在应急救援环境下能够发挥较强的优势,可有效获取一些危险环境下的状态信息。无人机与无人船组合,可以充分发挥各自优势,实现对局部海域目标的监测和跟踪,并且可以深入复杂局部海域环境,获得更多有效观测信息,成为当前解决局部海域特殊目标监测和跟踪的首选技术手段。
2、在实际环境中,无人船在复杂航行条件下可能面临路径规划困难和障碍物避让不足的问题,仅依靠船体自身的感知系统难以实现高效的路径规划功能。
技术实现思路
1、针对上述背景技术介绍中存在的问题,本发明提出一种无人船与无人机协同导航方法,以实现无人船的高效避障与精确定位,该方法通过引入无人机作为辅助设备,有效提高了无人船的环境感知能力,在应对复杂航行条件时,能够精确引导无人船主动规划航线,躲避障碍。
2、本发明采用的技术方案是:
3、无人船与无人机协同导航方法,包括如下步骤:
4、s1,航行开始前,根据行驶任务的不同为无人船与无人机分别设定运行路线,导入先验地图信息;
5、s2,无人机与无人船建立通信链路,无人机实时采集下方图像信息,并传输发送至无人船,无人船对收集到的图像数据进行预处理,识别图像中的障碍物和相对位置,输出相应障碍物位置、分类信息和相对位置信息;无人船采集当前环境信息,并进行数据融合更新地图;
6、s3,无人船获取当前区域内的环境信息,无人船通过处理区域图像信息获取当前位置的地形数据,将地形数据与导入的先验地图进行匹配,获取实时测量地形在先验地图中的位置,计算得出当前设备的运行位置;
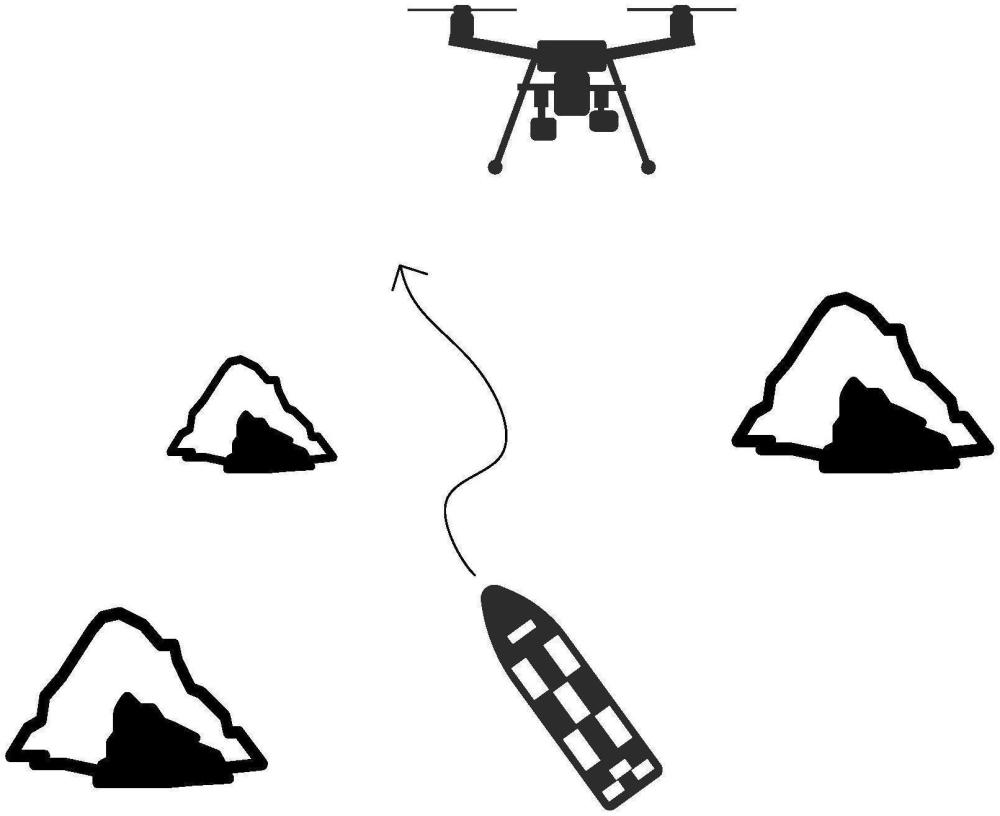
7、s4,无人船根据目标位置定向航行,并通过对当前区域内的环境信息进行判断来确定无人船的动作;若无人船识别出前方存在障碍物后,重新规划航行路线,控制推进器来改变航行的方向,不断更新航向路线,到达既定目标点;若无人船前方无障碍物,维持定向航行,到达既定目标点。
8、进一步,还包括s5,到达目标点后,通过视觉引导无人机降落在船体指定位置,预先在船体平台标定图案,一旦识别到船体上的指定降落位置,无人机将进入悬停状态,保持相对于船体的稳定悬停,通过视觉引导,无人机会实时调整其下降轨迹,确保无人机准确对准降落目标。
9、进一步,步骤s1中先验地图信息的建立包括:对工作水域的水体地形进行数字高程模型建模,在二维平面上进行等距分割处理,构建数字栅格地图。
10、进一步,步骤s2地图更新步骤如下:
11、无人船通过激光雷达、深度相机测量设备采集环境信息,使用贝叶斯估计进行数据融合;用o表示该区域内含有障碍物,表示无障碍可通行区域,e表示地图存在障碍物的情况;通过p(e|o)和得到多传感器的观测信息,从而更新占据栅格地图;
12、
13、上式中,p(e|o)和表示观测模型,p(e)表示先验概率;
14、假设每个栅格单元ci,j被占据的概率为po,栅格地图融合公式为:
15、
16、其中,表示观测后栅格处于被占据的概率,表示栅格单元被占据的概率,表示栅格单元未被占据的概率,po为贝叶斯估计融合后占据栅格的条件概率;
17、激光雷达与深度相机检测栅格占据概率公式
18、
19、数据融合公式
20、
21、表示激光雷达检测后栅格单元处于被占据的概率,表示激光雷达检测栅格单元未被占据的概率,po贝叶斯估计融合后占据栅格的条件概率;
22、栅格地图融合后,继续用融合后的局部地图去更新地图,从而得到融合后的全局地图;
23、
24、p(si|zt+1)表示融合了t+1时刻的观测值后栅格被占据的概率,p(si|zt)表示融合了t时刻的观测值后栅格被占据的概率,pobs(si|zt+1)表示根据t+1时刻的观测值判断栅格被占据的概率。
25、进一步,步骤s3中地图匹配过程如下:
26、无人机与无人船在指定水域通过测量设备获取环境信息,采用自适应蒙特卡洛定位(adaptive monte carlo localization,amcl)算法,在数字栅格地图中进行地形匹配;无人船的运动状态由当前在地图中的坐标(x,y)和朝向角θ组成,每个粒子就代表估计的无人船状态;预测过程如下所示
27、
28、当进行预测后根据观测值来对预测值进行修正,用于保证更接近无人船当前真实状态的粒子的权值更大;
29、
30、
31、重采样实现权值更高的粒子得到保存,权值低的粒子舍弃,将随机采样和kld采样应用于重采样过程且在重采样中添加长期似然度均值wslow和短期似然度均值wfast;
32、
33、αslow代表估计长期指数滤波器的衰减速率,αfast代表短期的衰减速率;随机采样的粒子增加依据为当短期似然优于长期似然时,判定粒子增加概率为零,则采样不增加粒子;当长期似然优于短期似然时,则按照的比例增加随机采样,amcl使用这种方法来改进重采样进而抵消重采样的误差;当amcl不知道无人船具体状态时,其会使用全局采样的方式来进行状态估计,粒子在全局范围内不断迭代更新后,实现收敛;计算已得到的粒子集合的加权平均值和协方差,通过此来得到系统的状态估计值。
34、进一步,步骤s4的无人船航行过程中,无人机始终在无人船周围环绕伴飞,无人船实时计算图像信息中自身的相对位置信息,同时定位与路线信息反馈至无人机,无人船出现在视野之中时,设备按原定路线保持运行,当无人船离开无人机视野时,主动修改无人机的飞行路线,靠近无人船移动,直至无人船出现在无人机视野设定范围内,根据无人机与无人船的相对位置进行飞行路线的更新,实时跟随无人船移动。
35、本发明与现有技术相比,其显著优点包括:无人船将实现优化定位航行,以较高精度实现航行控制。本发明使得无人船能够更灵活、智能地适应多样化的航行条件。这种协同导航方法的引入,不仅提高了自主航行系统的性能水平,也为未来自主导航技术的发展提供了有力的支持。
技术特征:1.无人船与无人机协同导航方法,包括如下步骤:
2.根据权利要求1所述的无人船与无人机协同导航方法,其特征在于:还包括s5,到达目标点后,通过视觉引导无人机降落在船体指定位置,预先在船体平台标定图案,一旦识别到船体上的指定降落位置,无人机将进入悬停状态,保持相对于船体的稳定悬停,通过视觉引导,无人机会实时调整其下降轨迹,确保无人机准确对准降落目标。
3.根据权利要求1所述的无人船与无人机协同导航方法,其特征在于:步骤s1中先验地图信息的建立包括:对工作水域的水体地形进行数字高程模型建模,在二维平面上进行等距分割处理,构建数字栅格地图。
4.根据权利要求3所述的无人船与无人机协同导航方法,其特征在于:步骤s2地图更新步骤如下:
5.根据权利要求4所述的无人船与无人机协同导航方法,其特征在于:步骤s3中地图匹配过程如下:
6.根据权利要求1所述的无人船与无人机协同导航方法,其特征在于:步骤s4的无人船航行过程中,无人机始终在无人船周围环绕伴飞,无人船实时计算图像信息中自身的相对位置信息,同时定位与路线信息反馈至无人机,无人船出现在视野之中时,设备按原定路线保持运行,当无人船离开无人机视野时,主动修改无人机的飞行路线,靠近无人船移动,直至无人船出现在无人机视野设定范围内,根据无人机与无人船的相对位置进行飞行路线的更新,实时跟随无人船移动。
技术总结无人船与无人机协同导航方法,包括如下步骤:S1,航行开始前,根据行驶任务的不同为无人船与无人机分别设定运行路线,导入先验地图信息;S2,无人机与无人船建立通信链路,无人机实时采集下方图像信息,并传输发送至无人船,无人船对收集到的图像数据进行识别,输出相应障碍物位置、分类信息和相对位置信息;S3,无人船获取当前区域内的环境信息,无人船通过处理区域图像信息获取当前位置的地形数据,计算得出当前设备的运行位置;S4,无人船根据目标位置定向航行,若无人船识别出前方存在障碍物后,重新规划航行路线,控制推进器来改变航行的方向,不断更新航向路线,到达既定目标点;若无人船前方无障碍物,维持定向航行,到达既定目标点。技术研发人员:屈家盛,史剑光,葛嘉伟,于海滨,彭时林受保护的技术使用者:杭州电子科技大学技术研发日:技术公布日:2024/9/12本文地址:https://www.jishuxx.com/zhuanli/20240914/294747.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表