用于实现无人矿卡进入和离开作业点的方法和控制装置与流程
- 国知局
- 2024-09-14 14:26:24
本发明涉及一种用于实现无人矿卡进入和离开作业点的方法和控制装置。
背景技术:
1、目前,在矿山作业中越来越多地使用无人矿卡进行矿业资源的运输。为此,无人矿卡必须经常驶入矿区的作业点(例如装载点、卸载点以及加油点),完成作业任务,然后又从该作业点驶离,去往下一个作业点,并再次重复上述进入-离开过程。然而,与人工驾驶的情况相比,一些惯常的操作、尤其是在矿卡在作业点的准确就位方面,对于无人矿卡都变得困难。例如,在人工驾驶的情况下,在矿卡从位于装载点附近的等候区驶向装载点时,操作手可通过装载车辆的铲斗的摆动来向矿卡驾驶员示意作业点的位置,从而驾驶员能相应地驾驶矿卡就位于适于装载的合适位置。然而,这对于无人矿卡而言很难实现,因为无人矿卡即使检测到了铲斗的挥动,也难以辨别或判断这是在指挥就位,还是准备开始装载作业,或干脆是无意中的动作。因此,人工驾驶矿卡在作业点处的入场和离场的传统管理方法不能直接转用于无人矿卡。当无人矿卡在从配设给某个作业点的等候区出发准备去往该作业点或完成了作业任务准备从该作业点离开时,如果不能有效地快速管理,会造成无人矿卡响应不及时、或无人矿卡无法准确就位、或无人矿卡车队堵塞在某个作业点的情况,从而影响生产效率和现场安全。
技术实现思路
1、为了克服上文中所提及的现有技术中存在的至少一个缺陷,本发明提出一种有效实现无人矿卡自动进入和自动离开作业点的方法和控制装置。
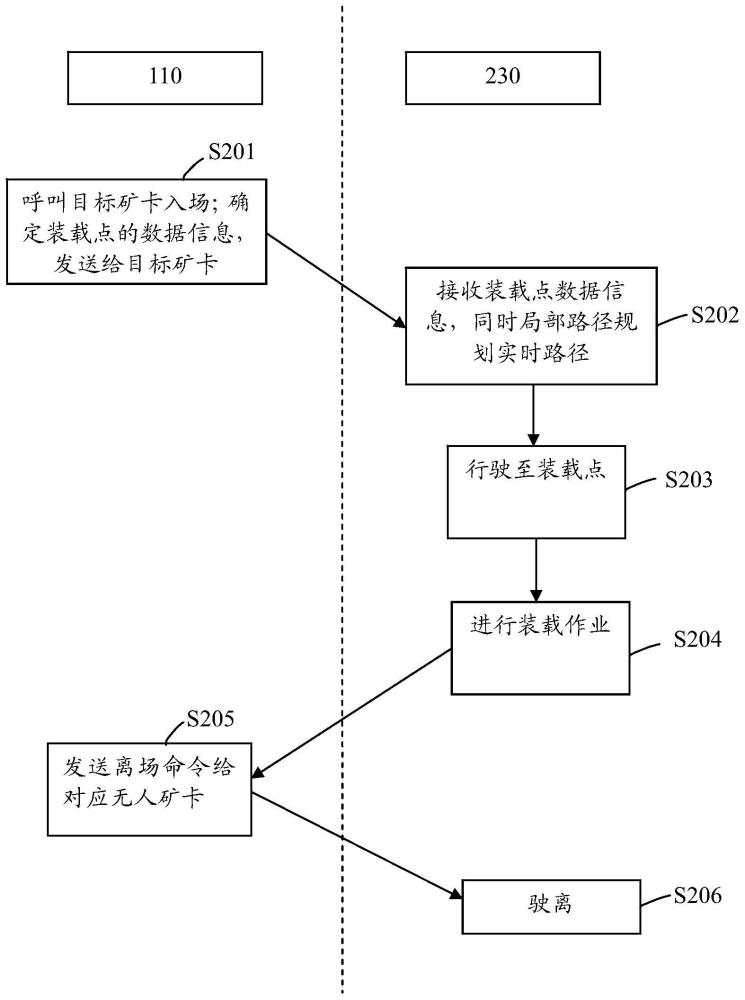
2、根据本发明的一方面,提出一种用于实现无人矿卡进入和离开作业点的方法,该方法包括:检测或接收与作业点的状态有关的信息,基于所检测或接收到的信息确定作业点的状态;相应于所确定的作业点的状态,向无人矿卡发送相应的信息,以实现无人矿卡的自动入场和自动离场。
3、根据本发明的另一方面,提出一种控制装置,该控制装置被设计用于执行如上所述的方法。
4、在此优点是,通过公共的控制装置、例如后台服务器与无人矿卡之间的交互,实现了无人矿卡安全高效地自动驶入作业点并在完成作业任务后又自动离开作业点,形成了对作业点和无人矿卡的有效管理,提高了生产效率和现场安全。
5、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本发明的保护范围。
技术特征:1.一种用于实现无人矿卡进入和离开作业点的方法,其特征在于,该方法包括:
2.根据权利要求1所述的方法,其特征在于,作业点至少具有空闲、作业和准备离场状态,特别地,作业点还具有入场和就位状态;和/或作业点包括装载点、卸载点和加油点。
3.根据权利要求1或2所述的方法,其特征在于,所述方法由公共的控制装置来实施,特别地,所述公共的控制装置是后台服务器。
4.根据权利要求1至3中任一项所述的方法,其特征在于,作业点的状态由作业点区域内的传感器来检测,优选地,作业点区域内的传感器包括设置在作业点处的作业车辆上的传感器、设置在无人矿卡上的传感器、设置作业点区域中其他位置处的传感器。
5.根据权利要求4所述的方法,其特征在于,传感器的传感器数据被直接传输给公共的控制装置,或者传感器数据经作业点侧的控制装置处理后,处理结果被传输给所述公共的控制装置,特别地,作业点侧的控制装置包括作业点处的作业车辆的控制器、无人矿卡的控制器。
6.根据权利要求1至5中任一项所述的方法,其特征在于,通过检测在作业点的位置上是否存在无人矿卡、无人矿卡的作业进度,以及作业点周围预定范围内是否存在无人矿卡及其行驶方向,来确定作业点的状态。
7.根据权利要求1至6中任一项所述的方法,其特征在于,在作业点处设置信号装置,使信号装置相应于作业点的不同状态切换成发射不同的信号,优选地,不同的信号是不同颜色的光信号或者不同波长和/或频率的声信号。
8.根据权利要求2所述的方法,其特征在于,在作业点处于空闲状态时,向无人矿卡发送入场呼叫信号,确定作业点的数据信息并发送所述数据信息至该无人矿卡,所述数据信息至少包括与作业点的位置有关的数据,特别地,所述数据信息包括作业点的位置、目标矿卡驶入作业点的航向角范围和目标矿卡驶入作业点的驶入方式。
9.根据权利要求8所述的方法,其特征在于,在接收到所述无人矿卡对入场呼叫信号的应答信号后,才将作业点的数据信息发送给所述无人矿卡。
10.根据权利要求8或9所述的方法,其特征在于,装载点的位置根据配设给装载点的装载车辆的当前位置和装载点相对于该装载车辆的期望位置来确定,在无人矿卡位于所述期望位置上时,便于装载车辆对无人矿卡进行装载。
11.根据权利要求8至10中任一项所述的方法,其特征在于,卸载点的位置根据卸载点类型和所检测到的卸载点现场情况来设定。
12.根据权利要求2至11中任一项所述的方法,其特征在于,在作业点处于无人矿卡完成了作业后的准备离场状态时,向无人矿卡发送离场命令。
13.根据权利要求8至12中任一项所述的方法,其特征在于,所述方法由公共的控制装置来实施,该公共的控制装置、无人矿卡和作业点处的作业车辆通过5g和/或wifi无线连接相互通信。
14.一种用于实现无人矿卡进入和离开作业点的控制装置,其特征在于,所述控制装置被配置用于执行根据权利要求1至13中任一项所述的方法。
15.根据权利要求14所述的控制装置,其特征在于,所述控制装置被设计成后台服务器。
技术总结本发明涉及一种用于实现无人矿卡进入和离开作业点的方法,该方法包括:检测或接收与作业点的状态有关的信息,基于所检测或接收到的信息确定作业点的状态;相应于所确定的作业点的状态,向无人矿卡发送相应的信息,以实现无人矿卡的自动入场和自动离场。本发明还涉及用于实施所述方法的控制装置。技术研发人员:陈维军,吕根波,吴向昌,宋建平,顾小石,党琦受保护的技术使用者:卡特彼勒公司技术研发日:技术公布日:2024/9/12本文地址:https://www.jishuxx.com/zhuanli/20240914/294076.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表