无人驾驶混铁车制动控制方法和系统与流程
- 国知局
- 2024-09-14 14:22:52
本发明涉及一种混铁车运行控制技术,尤其涉及一种无人驾驶混铁车制动控制方法和系统。
背景技术:
1、目前,大型联合钢铁企业中都配置有混铁车,混铁车又称“鱼雷式铁水罐车”,其是一种专用于运输铁水的轨道运输车辆。在大型联合钢铁企业中,在炼铁厂与炼钢厂之间铺设有轨道,混铁车经由轨道往来于炼铁厂与炼钢厂之间,其作用是将炼铁厂生产出的铁水运输至炼钢厂。
2、目前的混铁车,其所采用的制动方式为机械制动方式。具体来说,在混铁车的车轮处设置有机械制动机构,该机械制动机构能够对车轮实施机械摩擦式的制动动作,从而实现对车辆的制动刹车。机械制动机构实施制动动作所需的驱动力通常由压缩空气提供。
3、机械制动方式有着诸多的缺点,具体来说有如下几点:1)当车辆紧急制动时,为达到快速停车的目标,在极短时间内制动系统会输出较大制动压力,使得车轮转速急剧下降至停转,车轮在钢轨上对由滚动模式转变为滑动摩擦模式,这样一来,不但使得制动距离延长(依据物理原理,滑动摩擦系数小于静止摩擦系数,由此造成摩擦力变小),而且加剧了车轮与钢轨的磨损;2)车辆制动时,动能转化为摩擦热能进行消耗,无法实现制动能量的回收利用;3)当车辆平缓制动时,考虑到混铁车自身载重量大、钢轨线路坡度大等情况,在车辆满罐行驶进行制动时,往往无法快速准确将车辆停靠到理想位置;4)混铁车一般要经过受铁、铁水预处理、扒渣、等待、倒铁和空罐同运等多个阶段完成一次铁水运输流程,车辆需要反复启停,由于混铁车自身载重量较大,厂内线路状况不佳等时有发生,车辆制动时容易发生机械制动机构将车轮抱死的情况。
4、随着科技的进步,现有的混铁车的驱动方式已经由“内燃机驱动”转变为“电机驱动”,并且已经开始向“无人驾驶模式”的方向转变。以某大型钢铁企业为例,其所配置的混铁车多采用电机驱动方式来运行,并且均采用的无人驾驶技术。在现有的技术条件下,则可以考虑用电机来实现扭矩制动。
5、以下是检索到的本领域的相关专利:
6、中国专利(cn2551528y)公开了一种铁路机车车辆的弹簧蓄能停车制动器,其中公开了一种有轨车辆的制动装置,包括缸体、活塞、弹簧、丝杆、轴承、棘轮、缓解手柄、弹簧座、托盘、螺套、连接座和楔块,结构简单、体积小、加工方便、制造成本低,并能和各种制动单元配套使用。
7、中国专利(cn207173570u)公开了一种机车使用液压制动控制装置,其中包括液压制动总泵、液压制动装置、制动控制模块,实时反应制动力分配情况,有效防止了车辆打漂、侧滑甚至翻车发生的可能性。
技术实现思路
1、本发明的目的在于提供一种无人驾驶混铁车制动控制方法,采用该制动控制方法和系统能够有效保证车辆制动时的平稳性。
2、为了实现上述技术目的,本发明采用如下技术方案:
3、一种无人驾驶混铁车制动控制方法,所述混铁车由电机驱动运行,车轮处设置有机械制动机构;
4、所述制动控制方法包括:
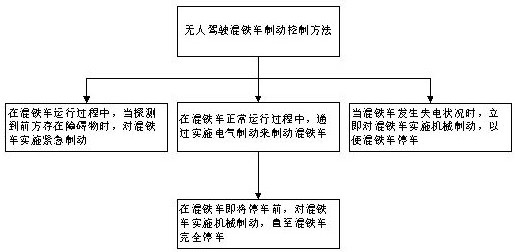
5、在混铁车正常运行过程中,当需要对混铁车制动以降低车速时,通过实施电气制动来制动混铁车;
6、在混铁车即将停车前,当混铁车的车速降低至预先设定的停车制动车速阈值时,对混铁车实施机械制动,直至混铁车完全停车;
7、所述电气制动是指,控制电机输出与混铁车行驶方向相反的力矩;
8、所述机械制动是指,控制机械制动机构对混铁车的车轮进行制动。
9、进一步地,所述混铁车的车头处设置有摄像头;
10、所述制动控制方法还包括:
11、在混铁车运行过程中,当摄像头探测到前方存在障碍物时,则对混铁车实施紧急制动;
12、所述紧急制动的具体实现方法包括:对混铁车同时实施电气制动和机械制动。
13、进一步地,所述制动控制方法还包括:
14、当混铁车发生失电状况时,立即对混铁车实施机械制动,以使混铁车停车。
15、进一步地,所述控制机械制动机构对混铁车的车轮进行制动,其具体实现的方法包括:所述机械制动机构由压缩空气来驱动实施制动动作,所述机械制动机构具有压缩空气输入管口,该压缩空气输入管口与压缩空气供给源连接,在压缩空气输入管口处设置有电控阀,通过控制电控阀的开关来控制压缩空气供给源提供的压缩空气进入机械制动机构,依靠压缩空气供给源提供的压缩空气来驱动实施制动动作。
16、进一步地,所述机械制动机构为闸瓦制动机构,所述电控阀为比例控制阀。
17、进一步地,在混铁车正常运行过程中实施电气制动之时,控制混铁车按照预先设定的正常行驶减速度来降低车速;在混铁车即将停车前实施机械制动之时,控制混铁车按照预先设定的停车制动减速度来降低车速;
18、当车辆满载进行制动时,正常行驶减速度控制在0.028m/s2~0.114m/s2的范围内,停车制动减速度控制在0.114m/s2~0.127m/s2的范围内;当车辆空载进行制动时,正常行驶减速度控制在0.050m/s2~0.226m/s2的范围内,停车制动减速度控制在0.226m/s2~0.240m/s2的范围内。
19、进一步地,
20、在对混铁车实施紧急制动之时,控制混铁车按照预先设定的紧急制动减速度来降低车速;
21、当车辆满载进行制动时,紧急制动减速度控制在0.075m/s2~0.137m/s2的范围内;当车辆空载进行制动时,紧急制动减速度控制在0.133m/s2~0.196m/s2的范围内。
22、进一步地,
23、在混铁车发生失电状况而对混铁车实施机械制动之时,控制混铁车按照预先设定的失电制动减速度来降低车速;
24、当车辆满载进行制动时,失电制动减速度控制在0.071m/s2~0.086m/s2的范围内;当车辆空载进行制动时,失电制动减速度控制在0.125m/s2~0.171m/s2的范围内。
25、进一步地,所述停车制动车速阈值在2km/h~4km/h的范围内取值。
26、一种无人驾驶混铁车制动控制系统,所述制动控制系统包括整车控制器,所述整车控制器中设置有实现上述的制动控制方法的程序。
27、在本发明的制动控制方法和系统中,在混铁车正常运行过程中,当需要对混铁车制动以降低车速时,通过实施电气制动来制动混铁车。由于电气制动所产生的制动力较为平稳,由制动产生的冲击力较小,且控制精度较高,车辆正常运行时依靠电气制动来进行速度控制,可以有效保证车辆制动时的平稳性,同时还能将车辆的动能转化为电能后回收,还能够避免车轮在钢轨上滑动摩擦所造成的车轮与钢轨的磨损。在混铁车即将停车前,当混铁车的车速降低至预先设定的停车制动车速阈值时,对混铁车实施机械制动。由于机械制动的可靠性较高,从而保证了车辆停车时的定位及时性和准确性。正常情况下采用电气制动,停车、紧急制动、失电制动等特殊情况下采用机械制动,这样可以大大降低机械制动机构的使用率。
28、本发明的制动控制方法相对现有技术,其有益效果在于:
29、1)在混铁车正常运行时依靠电气制动来进行速度控制,可以有效保证车辆制动时的平稳性;
30、2)在混铁车正常运行时依靠电气制动来进行速度控制,有利于回收车辆动能,有效降低了能耗;
31、3)在混铁车正常运行时依靠电气制动来进行速度控制,能够避免车轮与钢轨的磨损;
32、4)在混铁车即将停车前对混铁车实施机械制动,有利于车辆停车时的定位及时性和准确性;
33、5)大大降低机械制动机构的使用率,从而降低了车轮抱死情况的发生。
本文地址:https://www.jishuxx.com/zhuanli/20240914/293718.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表