用于有人无人可选线控制动装置的标定及故障识别方法与流程
- 国知局
- 2024-09-11 14:46:03
本发明属于车辆操纵与控制,具体涉及一种用于有人无人可选线控制动装置的标定及故障识别方法。
背景技术:
1、现有履带车辆多采用机械液压制动阀,无法满足无人化及有人无人可选车辆操控的需求,此外,机械阀的阀口开度和压差流量特性决定了机械阀的输出流量随踏板开度增大而增大,导致在踏板小开度情况下系统充油时间较长的问题。依靠电磁减压阀可实现制动的线控操纵,但存在由于电控系统故障等因素导致的安全风险,因此,亟需开展高安全性线控制动装置的研究工作。
技术实现思路
1、(一)要解决的技术问题
2、本发明要解决的技术问题是:如何开发一种线控冗余制动装置的的标定及故障识别方法,在实现履带车辆线控制动的基础上通过机械备份保证制动功能的可靠性,同时根据机械阀及电液比例减压阀的流量特性差异,通过提出的标定方法缩短制动系统响应时间,提升操控品质。
3、(二)技术方案
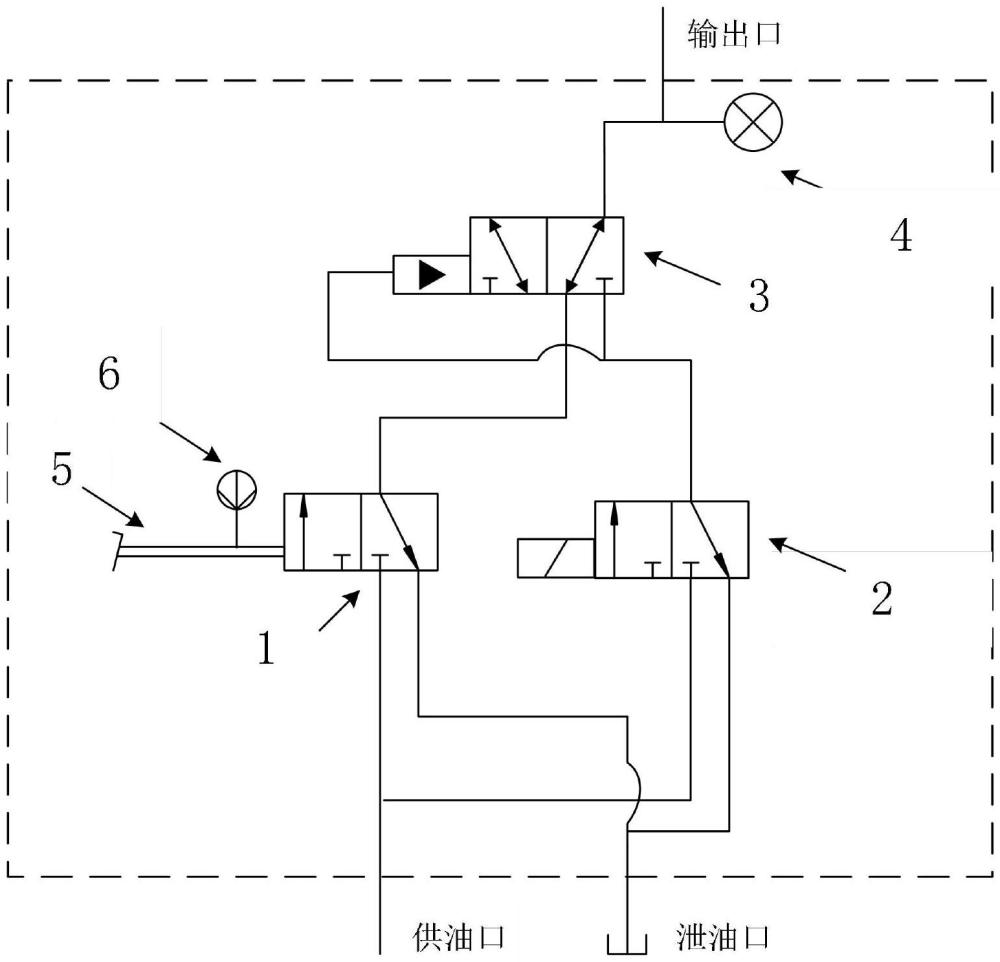
4、为解决上述技术问题,本发明提供一种用于有人无人可选线控制动装置的标定方法,所述有人无人可选线控制动装置包括:机械减压阀(1)、电液比例减压阀(2)、液控方向阀(3)、压力传感器(4)、制动踏板(5)、转角传感器(6);其中,所述机械减压阀(1)为三通减压阀,包括第一供油口、第一泄油口、第一输出油口;所述机械减压阀(1)的阀芯分别与制动踏板(5)、转角传感器(6)相连;所述电液比例减压阀(2)为三通电液比例减压阀,包括第二供油口、第二泄油口、第二输出油口;所述液控方向阀(3)为液控两位三通阀,包括两个供油口、一个敏感腔、第三输出油口;其中两个供油口分别与机械减压阀(1)和电液比例减压阀(2)的第一输出油口及第二输出油口相连,敏感腔与电液比例减压阀(2)的第二输出油口相连,第三输出油口与制动装置的输出口及压力传感器(4)相连;
5、所述标定方法包括如下步骤:
6、步骤1:测试机械减压阀(1)与电液比例减压阀(2)的压差流量特性;根据电液比例减压阀(2)和机械减压阀(1)的压差流量特性,找到不同压力下电液比例减压阀(2)和机械减压阀(1)输出流量特性重合点对应的输出压力pa;
7、步骤2:测试机械减压阀(1)的踏板开度-输出压力特性;根据机械减压阀(1)的踏板开度-输出压力特性,找到机械减压阀(1)对应输出压力pa的制动踏板(5)的转角位置α;将该转角位置α定义为临界点;
8、步骤3:在控制工具中标定电液比例减压阀(2)输出压力与制动踏板(5)转角的对应关系,使制动踏板(5)转角小于该临界点α的区间内,电液比例减压阀(2)输出压力略大于机械减压阀(1)输出压力,此时通过液控方向阀(3)的切换,制动装置由电液比例减压阀(2)输出制动压力;在制动踏板(5)转角大于该临界点α的区间内,使电液比例减压阀(2)输出压力小于机械减压阀(1)输出压力,则此时通过液控方向阀(3)的切换,制动装置由机械减压阀(1)输出制动压力。
9、其中,所述压力传感器(4)用于测量制动系统输出压力。
10、其中,所述制动装置设有壳体,壳体设有外连供油口、外连泄油口。
11、其中,所述第一供油口与制动装置的外连供油口相连,第一泄油口与制动装置的外连泄油口相连。
12、其中,所述第二供油口与制动装置的外连供油口相连,第二泄油口与制动装置的外连泄油口相连。
13、其中,有人模式下,该制动装置能够在小开度下具有较大输出流量,从而缩短系统充油时间。
14、此外,本发明还提供一种用于有人无人可选线控制动装置的故障识别方法,所述有人无人可选线控制动装置包括:机械减压阀(1)、电液比例减压阀(2)、液控方向阀(3)、压力传感器(4)、制动踏板(5)、转角传感器(6);其中,所述机械减压阀(1)为三通减压阀,包括第一供油口、第一泄油口、第一输出油口;所述机械减压阀(1)的阀芯分别与制动踏板(5)、转角传感器(6)相连;所述电液比例减压阀(2)为三通电液比例减压阀,包括第二供油口、第二泄油口、第二输出油口;所述液控方向阀(3)为液控两位三通阀,包括两个供油口、一个敏感腔、第三输出油口;其中两个供油口分别与机械减压阀(1)和电液比例减压阀(2)的第一输出油口及第二输出油口相连,敏感腔与电液比例减压阀(2)的第二输出油口相连,第三输出油口与制动装置的输出口及压力传感器(4)相连;
15、所述故障识别方法包括:
16、有人模式下的故障识别过程,以及无人模式下的故障识别过程。
17、其中,所述有人模式下的故障识别过程如下:
18、步骤b1:有人模式下,转角传感器(6)采集制动踏板(5)转角和制动装置输出压力,并校验实际输出压力是否与预设策略中对应制动踏板(5)转角下的输出压力值一致;
19、步骤b2:若差值小于给定值,则认为制动装置无故障;
20、步骤b3:若差值大于给定值,则认为制动装置的线控回路存在故障,上传故障信息。
21、其中,所述无人模式下的故障识别过程如下:
22、步骤c1:采集上层控制器制动指令,根据制动装置正常工况下的响应时间设定时间边界条件;
23、步骤c2:若给定时间内制动装置无输出油压,或输出油压与预设定油压差值过大,则认为制动装置的线控回路存在故障,提醒乘员采用机械制动进行操作。
24、其中,所述步骤b2中,所述给定值为0.1mpa;
25、所述步骤c1中,所述时间边界条件为0.2s;
26、所述步骤c2中,所述输出油压与预设定油压差值为0.3mpa以上。
27、(三)有益效果
28、与现有技术相比较,本发明提供的线控冗余制动装置的标定及故障识别方法,能够在实现履带车辆无人模式下线控制动操控的同时提升有人操控模式下制动系统的响应时间,同时能够保证线控支路故障情况下驾驶员能够通过机械方式实现制动,保证车辆的制动安全性。
29、本发明技术方案可用于有人及无人驾驶车辆,根据线控制动的安全需求,利用机械减压阀对电液比例减压阀进行备份;通过提出的标定方法提升踏板小开度情况下装置的输出流量,缩短充油时间;通过提出的故障识别方法,分别在无人控制模式及有人模式下识别系统内线控回路的故障,对提高线控制动安全性具有积极作用。
技术特征:1.一种用于有人无人可选线控制动装置的标定方法,其特征在于,所述有人无人可选线控制动装置包括:机械减压阀(1)、电液比例减压阀(2)、液控方向阀(3)、压力传感器(4)、制动踏板(5)、转角传感器(6);其中,所述机械减压阀(1)为三通减压阀,包括第一供油口、第一泄油口、第一输出油口;所述机械减压阀(1)的阀芯分别与制动踏板(5)、转角传感器(6)相连;所述电液比例减压阀(2)为三通电液比例减压阀,包括第二供油口、第二泄油口、第二输出油口;所述液控方向阀(3)为液控两位三通阀,包括两个供油口、一个敏感腔、第三输出油口;其中两个供油口分别与机械减压阀(1)和电液比例减压阀(2)的第一输出油口及第二输出油口相连,敏感腔与电液比例减压阀(2)的第二输出油口相连,第三输出油口与制动装置的输出口及压力传感器(4)相连;
2.如权利要求1所述的用于有人无人可选线控制动装置的标定方法,其特征在于,所述压力传感器(4)用于测量制动系统输出压力。
3.如权利要求1所述的用于有人无人可选线控制动装置的标定方法,其特征在于,所述制动装置设有壳体,壳体设有外连供油口、外连泄油口。
4.如权利要求3所述的用于有人无人可选线控制动装置的标定方法,其特征在于,所述第一供油口与制动装置的外连供油口相连,第一泄油口与制动装置的外连泄油口相连。
5.如权利要求3所述的用于有人无人可选线控制动装置的标定方法,其特征在于,所述第二供油口与制动装置的外连供油口相连,第二泄油口与制动装置的外连泄油口相连。
6.如权利要求1所述的用于有人无人可选线控制动装置的标定方法,其特征在于,有人模式下,该制动装置能够在小开度下具有较大输出流量,从而缩短系统充油时间。
7.一种用于有人无人可选线控制动装置的故障识别方法,其特征在于,所述有人无人可选线控制动装置包括:机械减压阀(1)、电液比例减压阀(2)、液控方向阀(3)、压力传感器(4)、制动踏板(5)、转角传感器(6);其中,所述机械减压阀(1)为三通减压阀,包括第一供油口、第一泄油口、第一输出油口;所述机械减压阀(1)的阀芯分别与制动踏板(5)、转角传感器(6)相连;所述电液比例减压阀(2)为三通电液比例减压阀,包括第二供油口、第二泄油口、第二输出油口;所述液控方向阀(3)为液控两位三通阀,包括两个供油口、一个敏感腔、第三输出油口;其中两个供油口分别与机械减压阀(1)和电液比例减压阀(2)的第一输出油口及第二输出油口相连,敏感腔与电液比例减压阀(2)的第二输出油口相连,第三输出油口与制动装置的输出口及压力传感器(4)相连;
8.如权利要求7所述的用于有人无人可选线控制动装置的故障识别方法,其特征在于,所述有人模式下的故障识别过程如下:
9.如权利要求8所述的用于有人无人可选线控制动装置的故障识别方法,其特征在于,所述无人模式下的故障识别过程如下:
10.如权利要求9所述的用于有人无人可选线控制动装置的故障识别方法,其特征在于,所述步骤b2中,所述给定值为0.1mpa;
技术总结本发明属于车辆操纵与控制技术领域,具体涉及一种用于有人无人可选线控制动装置的标定及故障识别方法,所述线控制动装置包括制动踏板、转角传感器、液压减压阀、电液比例减压阀、液控方向阀,能够同时满足电控、及人力机械操作需求,所述标定方法能够根据液压减压阀和电液比例减压阀的流量特性,最大限度减小充油时间的同时使制动阀具备故障识别能力。该线控制动装置及标定方法能够在保证线控安全性的基础上提高制动响应时间,并具备故障识别功能。技术研发人员:简洪超,陶天朗,胡铮,邹武俊,毛福合,张万昊,汪银风,欧阳巍受保护的技术使用者:中国北方车辆研究所技术研发日:技术公布日:2024/9/9本文地址:https://www.jishuxx.com/zhuanli/20240911/292085.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。