基于动态卡尔曼和PID控制的激光器温度控制系统
- 国知局
- 2024-09-14 14:41:37
本发明公开基于动态卡尔曼和pid控制的激光器温度控制系统,属于温度控制。
背景技术:
1、可调谐半导体激光器一般是在一定的可变温度环境下进行工作,因为可调谐半导体激光器中光源的多路恒流源的电流注入产生的焦耳热效应以及各调谐节之间的热传导也会引起温度变化,同时也存在外部环境的温度变化,这些温度变化不仅会引起激光器功率的变化,也会引起激光器对于输出波长的波长漂移,温度每变化1℃,对应的输出波长漂移近100pm,对于激光器的输出波长是有剧烈影响。因此高精度温度控制方案对保证可调谐半导体激光器稳定长效的正常工作至关重要,所以对于可调谐半导体激光器进行高精度稳定的温度控制是亟需解决的。
2、由于可调谐激光器等光纤解调系统对于工作时的温度要求极高,常规的温度控制方案在温度采集过程中存在高分辨率区间的采集精度不够准确的问题,不能满足可调谐激光器的温控要求。造成这个现象的一个重要原因是在温度传感模块采集回温度信息后,没有精细化可靠的滤波算法,导致温度测量值和预测值不够高度精确,伴随这种现象的同时也就产生了对后续温度控制算法的闭环输入误差。针对可调谐激光器的工作特性尤其是热量特性,同时联系半导体制冷片的工作特点,在整定过程中高温偏移量较大,像目前常规的pid控制算法等,已经不能满足高精度温度控制要求,并且对于半导体制冷片的驱动控制不够精细。
技术实现思路
1、本发明的目的在于提供基于动态卡尔曼和pid控制的激光器温度控制系统,以解决现有技术中,可调谐激光器温度控制不够精细的问题。
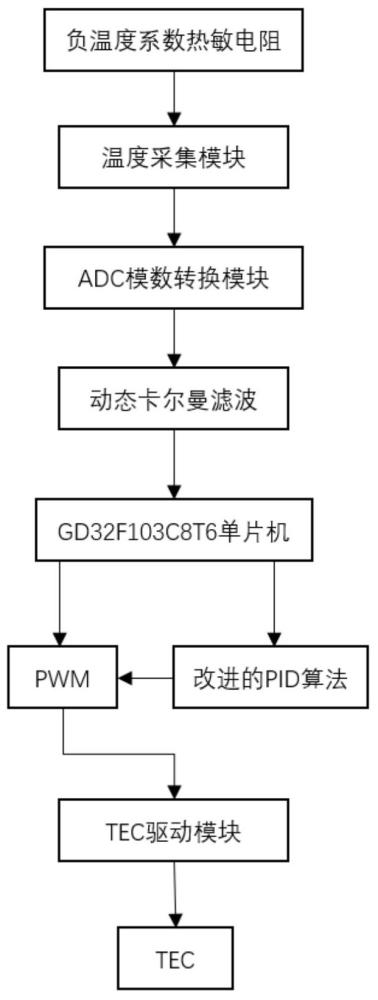
2、基于动态卡尔曼和pid控制的激光器温度控制系统,包括负温度系数热敏电阻、温度采集模块、模拟数字转换器、动态卡尔曼滤波模块、单片机、pid算法模块、脉冲宽度调制模块、半导体制冷片驱动模块和半导体制冷片;
3、温度采集模块采集负温度系数热敏电阻的温度输入至模拟数字转换器,模拟数字转换器的输出结果导入动态卡尔曼滤波模块进行温度预测,将温度预测结果导入单片机进行判断:
4、若瞬时温度变量与设定目标温度差值为正,通过pid算法模块控制半导体制冷片驱动模块进行降温;
5、若瞬时温度变量与设定目标温度差值为负,通过pid算法模块控制半导体制冷片驱动模块进行升温,继续进行判断,温度变量与设定目标温度差值为正,进行降温,温度变量与设定目标温度差值为负,进行升温;
6、单片机通过判断做出控制决定后,输出脉冲宽度调制信号至半导体制冷片驱动模块,半导体制冷片驱动模块控制半导体制冷片执行升温或者降温。
7、动态卡尔曼滤波包括,状态转移模型为:
8、;
9、式中,是时刻状态向量,是时刻状态向量,是时刻输入向量,输入向量为对半导体制冷片的加热和制冷功率的控制信息,是时刻过程噪声,的协方差为,是状态转移函数;
10、观测模型为:
11、;
12、式中,是时刻观测向量,是时刻观测噪声,的协方差为,是观测函数。
13、动态卡尔曼滤波包括,温度预测模型为:
14、;
15、式中,是由时刻向时刻的温度预测值,是时刻状态转移矩阵,是时刻的温度估计值,是时刻输入矩阵,输入矩阵是对温度变化的影响系数;
16、误差协方差预测模型为:
17、;
18、式中,是由时刻向时刻的误差协方差预测值,是时刻误差协方差。
19、动态卡尔曼滤波包括,动态卡尔曼增益计算为:
20、;
21、式中,是时刻的卡尔曼增益,卡尔曼增益权衡预测值和观测值的可信度,决定在更新时如何调整温度预测值,是时刻的观测矩阵的雅可比矩阵;
22、基于动态卡尔曼增益,进行状态更新:
23、;
24、式中,是基于动态卡尔曼增益的时刻状态向量的估值,是基于动态卡尔曼增益的时刻状态向量。
25、动态卡尔曼滤波包括,基于动态卡尔曼增益,温度估计模型为:
26、;
27、式中,是基于动态卡尔曼增益的时刻温度估计值,是时刻的温度测量值,温度测量值是温度采集模块采集到的瞬时温度测量值;
28、基于动态卡尔曼增益,误差协方差估计模型为:
29、;
30、式中,是基于动态卡尔曼增益的时刻误差协方差估计值,是单位矩阵。
31、计算温度采集模块采集到的瞬时温度测量值包括,温度采集模块的转换公式为:
32、;
33、式中,表示温度时的热敏电阻值,表示温度时的热敏电阻值,表示热敏电阻的热敏系数,是开尔文温度,是标准温度下的开尔文温度;
34、温度采集电路采集的瞬时模拟电压值为:
35、;
36、瞬时温度测量值为:
37、。
38、pid算法包括:
39、;
40、式中,是时刻pid控制增量,是比例增益,是时刻误差,是时刻误差,是积分增益,是微分增益。
41、pid算法的控制过程包括:
42、将设置为1,、均设置为0,绘制时间和温度的响应曲线;
43、调制时,增加,以5为步长,当稳态值满足稳态误差后,再以1为步长回调,寻找最优响应曲线;
44、调制时,增加,以0.0002为步长,寻找最优响应曲线,降温过程的大于升温过程的;
45、调制时,增加,以0.0000004为步长,寻找最优响应曲线。
46、升温时,设置死区参数为0.001℃。
47、降温时,不设置死区参数。
48、相对比现有技术,本发明具有以下有益效果:本发明利用温度传感电路和高分辨率的adc模数转换模块结合动态卡尔曼滤波有效提升分辨率区间的采集精度,结合改进的pid算法和后续的驱动模块,使温度控制曲线更加平滑精准;有效补偿了在可调谐激光器正常工作时产生的热效应以及半导体制冷片工作时产生的热量抵消现象,控制高温误差偏移量,减小高精度温控区间的稳态误差。
技术特征:1.基于动态卡尔曼和pid控制的激光器温度控制系统,其特征在于,包括负温度系数热敏电阻、温度采集模块、模拟数字转换器、动态卡尔曼滤波模块、单片机、pid算法模块、脉冲宽度调制模块、半导体制冷片驱动模块和半导体制冷片;
2.根据权利要求1所述的基于动态卡尔曼和pid控制的激光器温度控制系统,其特征在于,动态卡尔曼滤波包括,状态转移模型为:
3.根据权利要求2所述的基于动态卡尔曼和pid控制的激光器温度控制系统,其特征在于,动态卡尔曼滤波包括,温度预测模型为:
4.根据权利要求3所述的基于动态卡尔曼和pid控制的激光器温度控制系统,其特征在于,动态卡尔曼滤波包括,动态卡尔曼增益计算为:
5.根据权利要求4所述的基于动态卡尔曼和pid控制的激光器温度控制系统,其特征在于,动态卡尔曼滤波包括,基于动态卡尔曼增益,温度估计模型为:
6.根据权利要求5所述的基于动态卡尔曼和pid控制的激光器温度控制系统,其特征在于,计算温度采集模块采集到的瞬时温度测量值包括,温度采集模块的转换公式为:
7.根据权利要求1所述的基于动态卡尔曼和pid控制的激光器温度控制系统,其特征在于,pid算法包括:
8.根据权利要求7所述的基于动态卡尔曼和pid控制的激光器温度控制系统,其特征在于,pid算法的控制过程包括:
9.根据权利要求8所述的基于动态卡尔曼和pid控制的激光器温度控制系统,其特征在于,升温时,设置死区参数为0.001℃。
10.根据权利要求9所述的基于动态卡尔曼和pid控制的激光器温度控制系统,其特征在于,降温时,不设置死区参数。
技术总结本发明公开基于动态卡尔曼和PID控制的激光器温度控制系统,属于温度控制技术领域,用于可调谐激光器温度控制,包括负温度系数热敏电阻、温度采集模块、模拟数字转换器、动态卡尔曼滤波模块、单片机、PID算法模块、脉冲宽度调制模块、半导体制冷片驱动模块和半导体制冷片。本发明利用温度传感电路和高分辨率的ADC模数转换模块结合动态卡尔曼滤波有效提升分辨率区间的采集精度,结合改进的PID算法和后续的驱动模块,使温度控制曲线更加平滑精准;有效补偿了在可调谐激光器正常工作时产生的热效应以及解决了半导体制冷片工作时产生的热量抵消现象,控制高温误差偏移量,减小高精度温控区间的稳态误差。技术研发人员:杜立彬,刘恒瑞,袁一博,孟祥谦,柳佳浩,王子奕,梁光信受保护的技术使用者:山东科技大学技术研发日:技术公布日:2024/9/12本文地址:https://www.jishuxx.com/zhuanli/20240914/295552.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表