一种PDC控制器的跟踪控制方法、装置、介质及产品
- 国知局
- 2024-09-19 14:33:08
本发明涉及跟踪控制,特别是涉及一种基于事件触发条件下改进的用于网络化t-s模糊系统的pdc控制器的跟踪控制方法、装置、介质及产品。
背景技术:
1、t-s模糊控制作为控制领域中的一种模糊控制方法,目前已经大量应用在机械臂、无人小车等对象上。相比于传统的pid控制,t-s模糊控制的优势在于通过制定多条模糊规则,可以更好的发现非线性因素的规律,解决一些非线性的问题,具体表现为将非线性系统分为若干个线性子系统,通过if-then的规则将每个线性子系统与隶属度函数统一,然后将每个线性子系统光滑的连接起来,此时需要对每个线性子系统都设计一个子控制器,控制器需满足pdc(并行分布补偿)设计原则。
2、近年来,将t-s模糊控制与网络化结合成为热点,但在二者结合得到的网络化t-s模糊系统下,由于量化、丢包等因素会导致在设计控制器时很难遵循pdc设计原则,无法实现稳定的跟踪控制。
技术实现思路
1、本发明的目的是提供一种pdc控制器的跟踪控制方法、装置、介质及产品,可在事件触发条件下设计适用于网络化t-s模糊系统的pdc控制器,实现稳定的跟踪控制。
2、为实现上述目的,本发明提供了如下方案:
3、一种pdc控制器的跟踪控制方法,应用于网络化t-s模糊系统,网络化t-s模糊系统包括被控对象系统、参考系统、事件触发器、模糊跟踪控制器和缓冲器,被控对象系统和参考系统分别与事件触发器相连接,事件触发器通过第一网络通道与模糊跟踪控制器相连接,模糊跟踪控制器通过第二网络通道与缓冲器相连接,缓冲器分别与被控对象系统和参考系统相连接,包括:
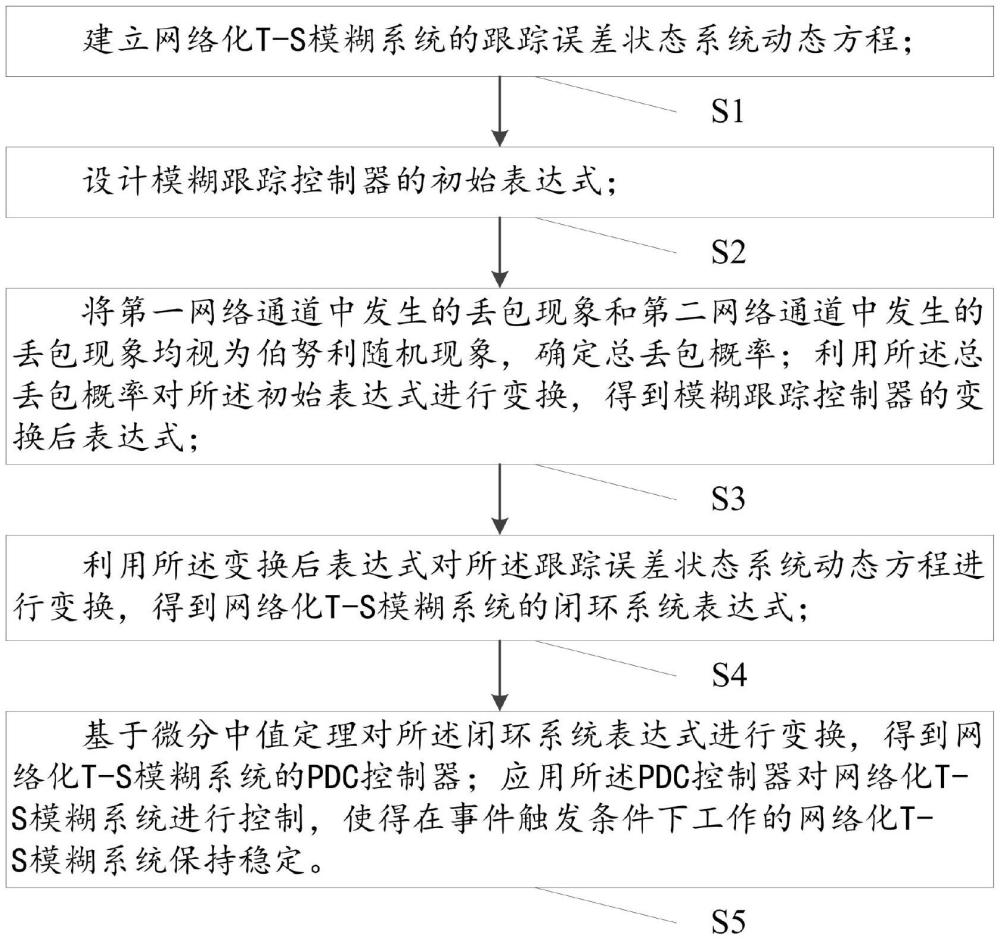
4、建立网络化t-s模糊系统的跟踪误差状态系统动态方程;
5、设计模糊跟踪控制器的初始表达式;
6、将第一网络通道中发生的丢包现象和第二网络通道中发生的丢包现象均视为伯努利随机现象,确定总丢包概率;利用所述总丢包概率对所述初始表达式进行变换,得到模糊跟踪控制器的变换后表达式;
7、利用所述变换后表达式对所述跟踪误差状态系统动态方程进行变换,得到网络化t-s模糊系统的闭环系统表达式;
8、基于微分中值定理对所述闭环系统表达式进行变换,得到网络化t-s模糊系统的pdc控制器;应用所述pdc控制器对网络化t-s模糊系统进行控制,使得在事件触发条件下工作的网络化t-s模糊系统保持稳定。
9、一种计算机装置,包括:存储器、处理器以及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序以实现上述一种pdc控制器的跟踪控制方法的步骤。
10、一种计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现上述一种pdc控制器的跟踪控制方法的步骤。
11、一种计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现上述一种pdc控制器的跟踪控制方法的步骤。
12、根据本发明提供的具体实施例,本发明公开了以下技术效果:
13、本发明提供一种pdc控制器的跟踪控制方法、装置、介质及产品,建立网络化t-s模糊系统的跟踪误差状态系统动态方程,设计模糊跟踪控制器的初始表达式,将第一网络通道中发生的丢包现象和第二网络通道中发生的丢包现象均视为伯努利随机现象,确定总丢包概率,利用总丢包概率对初始表达式进行变换,得到模糊跟踪控制器的变换后表达式,利用变换后表达式对跟踪误差状态系统动态方程进行变换,得到网络化t-s模糊系统的闭环系统表达式,基于微分中值定理对闭环系统表达式进行变换,得到网络化t-s模糊系统的pdc控制器,应用pdc控制器对网络化t-s模糊系统进行控制,使得在事件触发条件下工作的网络化t-s模糊系统保持稳定,从而可在事件触发条件下设计适用于网络化t-s模糊系统的pdc控制器,实现稳定的跟踪控制。
技术特征:1.一种pdc控制器的跟踪控制方法,应用于网络化t-s模糊系统,网络化t-s模糊系统包括被控对象系统、参考系统、事件触发器、模糊跟踪控制器和缓冲器,被控对象系统和参考系统分别与事件触发器相连接,事件触发器通过第一网络通道与模糊跟踪控制器相连接,模糊跟踪控制器通过第二网络通道与缓冲器相连接,缓冲器分别与被控对象系统和参考系统相连接,其特征在于,包括:
2.根据权利要求1所述的一种pdc控制器的跟踪控制方法,其特征在于,所述跟踪误差状态系统动态方程包括:被控对象系统的空间状态方程、参考系统的空间状态方程和跟踪误差状态方程;
3.根据权利要求1所述的一种pdc控制器的跟踪控制方法,其特征在于,所述初始表达式为:
4.根据权利要求1所述的一种pdc控制器的跟踪控制方法,其特征在于,所述总丢包概率的表达式为:
5.根据权利要求1所述的一种pdc控制器的跟踪控制方法,其特征在于,所述闭环系统表达式为:
6.根据权利要求5所述的一种pdc控制器的跟踪控制方法,其特征在于,基于微分中值定理对所述闭环系统表达式进行变换,得到网络化t-s模糊系统的pdc控制器,具体包括:
7.一种计算机装置,包括:存储器、处理器以及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序以实现权利要求1-6中任一项所述一种pdc控制器的跟踪控制方法的步骤。
8.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该计算机程序被处理器执行时实现权利要求1-6中任一项所述一种pdc控制器的跟踪控制方法的步骤。
9.一种计算机程序产品,包括计算机程序,其特征在于,该计算机程序被处理器执行时实现权利要求1-6中任一项所述一种pdc控制器的跟踪控制方法的步骤。
技术总结本发明公开一种PDC控制器的跟踪控制方法、装置、介质及产品,涉及跟踪控制技术领域,方法包括:将网络通道中发生的丢包现象视为伯努利随机现象,确定总丢包概率,利用总丢包概率对模糊跟踪控制器的初始表达式进行变换,得到变换后表达式,利用变换后表达式对网络化T‑S模糊系统的跟踪误差状态系统动态方程进行变换,得到闭环系统表达式,基于微分中值定理对闭环系统表达式进行变换,得到PDC控制器,应用PDC控制器对网络化T‑S模糊系统进行控制,使得在事件触发条件下工作的网络化T‑S模糊系统保持稳定,从而可在事件触发条件下设计适用于网络化T‑S模糊系统的PDC控制器,实现稳定的跟踪控制。技术研发人员:陈自然,田一凡,张正强,谭成受保护的技术使用者:曲阜师范大学技术研发日:技术公布日:2024/9/17本文地址:https://www.jishuxx.com/zhuanli/20240919/298774.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表