一种无人机设备管理平台的制作方法
- 国知局
- 2024-09-19 14:32:43
本发明涉及无人机管控,尤其涉及一种无人机设备管理平台。
背景技术:
1、无人机经常需要到指定空域去执行飞行任务,比如巡视、信息采集等。目前对无人机飞行过程中的管控,主要是通过无人机的gps定位模块结合人工操控来实现,上述管控方式不够简便、高效,需要人工不断干预,给使用过程带来了一定的不便,降低了产品的使用体验,同时消耗了大量人力。
2、现如今急需一种可以智能化实时管控无人机的平台,一种可以智能化控制无人机飞行状态,以及预防无人机碰撞,时刻监视无人机的续航里程,智能化地将电量低的无人机停靠,尽可能减少人力干预无人机飞行的管控平台系统。
技术实现思路
1、针对上述问题,本发明提供一种无人机设备管理平台,可以根据无人机的飞行状态,智能管控无人机,实时地给出上升、下降以及加速等指令;同时无人机管理平台也可以结合周围环境因素及其自身电池剩余量,实时计算剩余可飞行里程,决策出无人机接下来是降落还是继续飞行。
2、本发明提供一种无人机设备管理平台,采用如下技术方案:
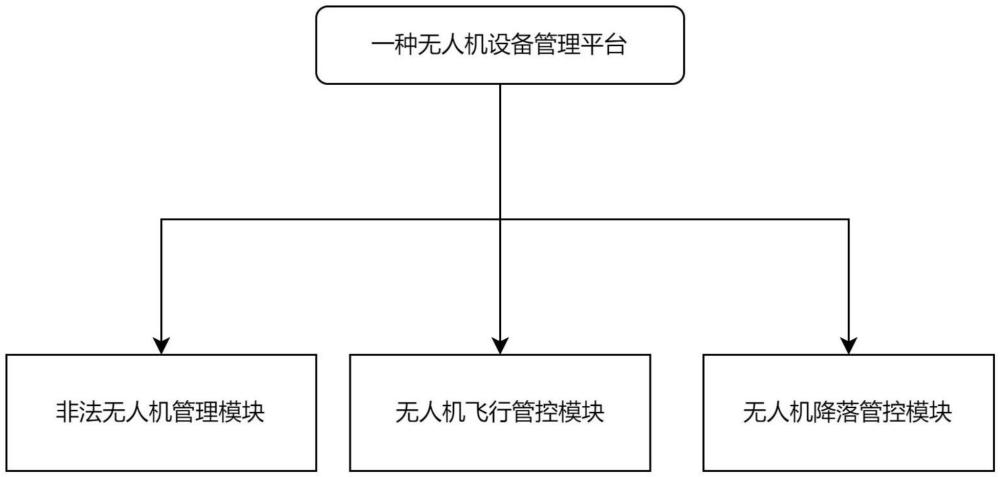
3、该管理平台包括非法无人机管理模块、无人机飞行管控模块、无人机降落管控模块;其中:
4、方案模块1:非法无人机管理模块判断在管控空域内,是否存在非法无人机,并对非法无人机进行管控;
5、方案模块2:无人机飞行管控模块对正在飞行的合法无人机进行管控;
6、方案模块3:无人机降落管控模块对收到降落指令的无人机进行管控。
7、基于方案模块1:非法无人机管理模块判断在管控空域内,是否存在非法无人机,并对非法无人机进行管控,包括:
8、电信号获取单元获取管控飞行空域内的无人机的电信号;
9、电信号判别单元辨别出未经登记或未经允许飞行的非法无人机;
10、非法无人机管理模块对非法无人机采取强制降落管控。
11、所述非法无人机分为两类:一类为在管控飞行空域飞行但未在管理平台登记的未知无人机;一类为在管理平台登记过但是并未获得飞行许可的无人机。
12、电信号获取单元获取管控飞行空域内的无人机的电信号,包括:
13、根据电信号获取单元接收的管控空域内的无人机信号,并将所述无人机电信号的信息以及据此判断的无人机的数量信息保存并上传至电信号判别单元。
14、电信号判别单元辨别出未经登记或未经允许飞行的非法无人机,包括:
15、电信号判别单元从平台数据库获取已存在的合法无人机的电信号信息,将电信号获取单元上传的无人机信息与所述合法无人机电信号信息进行比对判断,如果对比成功,则判定结果为合法无人机;如果所述上传的无人机电信号与所述合法无人机电信号信息均不匹配,则判定结果为非法无人机。
16、管理平台的显示模块主界面为二维地图,为基础空域图层;所述显示模块根据电信号获取模块上传的数量信息,将在线的合法无人机、非法无人机与总登记的无人机的数量实时显示;其中总登记数和在线数下方设置登记的单位/部门,可供选择;当选择相应单位/部门后,无人机的总登记数和在线数相应跟随变化。
17、单位/部门采用总-分结构显示,上一级单位/部门位于上方,下一级单位/部门陈列在下方,并初步显示无人机的总登记数和在线数。
18、非法无人机管理模块对非法无人机进行强制降落管控,包括:
19、所述非法无人机管理模块识别到非法无人机后,对非法无人机采取强制管控措施。
20、可选地,所述非法无人机管理模块获取无人机控制权,非法无人机控制单元关闭非法无人机的摄像头,并对无人机进行强制原地降落。
21、可选地,所述非法无人机管理模块获取无人机控制权,非法无人机控制单元关闭非法无人机的摄像头,强制无人机定点降落至无人机降落平台,数据采集单元将无人机中的数据、无人机电信号以及无人机型号等参数上传至管理平台。
22、基于方案模块2:无人机飞行管控模块对正在飞行的合法无人机进行管控,包括:
23、无人机飞行管控模块对无人机飞行状态进行管控;
24、无人机飞行管控模块对无人机安全飞行进行管控;
25、无人机飞行管控模块对无人机的续航管理进行管控。
26、所述无人机飞行管控模块对无人机飞行状态进行管控,包括:
27、地面设置多个无人机探测雷达,无人机探测雷达精确测量出无人机的位置、距离以及俯仰角。
28、所述无人机飞行管控模块对无人机的高度进行管控,计算出无人机的飞行高度,飞行高度的计算公式如下:
29、h=s×cosθ
30、其中,h为飞行高度,s为无人机与雷达之间的距离,θ为雷达测量出的俯仰角。
31、所述无人机飞行管控模块通过无人机探测雷达所测量的无人机飞行高度,对无人机的飞行状态管控:如果飞行高度大于第一高度阈值,则第一控制单元控制无人机下降直至到达第一高度阈值与第二高度阈值之间;如果飞行高度小于第一高度阈值大于第二高度阈值,则所述无人机飞行管控模块不对无人机进行高度管控;如果飞行高度小于第二高度阈值,则第一控制单元控制无人机上升直至到达第一高度阈值与第二高度阈值之间。
32、所述无人机飞行管控模块通过无人机探测雷达所测量的无人机的飞行速度,对无人机的飞行状态进行管控:如果无人机飞行速度大于第一速度阈值,则第一控制单元控制无人机减速,直至无人机飞行速度到达第一速度阈值以下。
33、所述无人机飞行管控模块对无人机安全飞行进行管控,包括:
34、所述无人机飞行管控模块对两架无人机是否会碰撞进行预测,并给出相应的警告信息或者做出避让管控。
35、地面设置的无人机探测雷达检测出无人机的位置,以无人机探测雷达为坐标原点,无人机飞行管控模块中的坐标计算单元,计算出无人机的坐标;所述管理平台对管控空域进行网格划分,将可飞行区域空间划分为若干个区域网格,第一距离计算单元对符合以下任一条件的无人机进行距离计算:
36、条件一,在同一网格内的两架无人机;
37、条件二,在相邻网格内的两架无人机。
38、两架无人机之间的距离计算公式如下:
39、
40、其中,x1,y1,z1表示第一架无人机的坐标,x2,y2,z2表示第二架无人机的坐标。
41、第一距离判断单元获取两架无人机之间的距离l并进行判断,如果距离l小于第一距离阈值,则碰撞预测单元对所述这两架无人机进行轨迹预测,进一步判断所述两架无人机是否有相撞的危险。
42、所述轨迹预测的方法如下:获取第一架无人机的若干个飞行坐标,通过支持向量回归方法,轨迹计算单元根据所获取的坐标数据计算出第一架无人机的运动关系函数,该运动关系函数曲线即为所预测的第一架无人机轨迹,同理计算出第二架无人机的运动关系函数,预测其轨迹;碰撞预测单元通过无人机的轨迹、运动速度与运动方向判断无人机在第一时间阈值是否有轨迹重合,如果存在重合,则说明有碰撞的风险,管控平台采取相应安全管控措施;如果不存在重合,则认为无人机处于安全飞行的状态,则不采取措施。
43、所述安全管控措施,包括:碰撞预测单元判断出无人机存在碰撞的风险,警告单元向平台管理者发出警告信息,所述显示模块将可能存在碰撞风险的无人机展示给系统管理者,安全控制单元接收系统管理者发出的避让指令,控制无人机避开碰撞路线;如果安全控制单元在第二时间阈值内没有接收到系统管理者的控制指令,则自动给无人机发出避让指令,控制无人机避开碰撞路线。
44、所述无人机飞行管控模块对无人机续航管理进行管控,包括:
45、所述无人机飞行管控模块对无人机的续航里程进行管控,里程计算单元获取无人机的剩余电量信息,通过剩余电量计算无人机剩余的可飞行里程。
46、当无人机处于正常工作状态时,无人机的剩余可飞行里程计算公式如下:
47、
48、其中r为剩余里程数,e为电池总容量(单位kwh),ω为电量的剩余百分比,表示平均每公里的能耗(单位kwh/km)。
49、所述正常工作状态,指在无人机运作过程中,无人机无负载,空中温度在第一与第二温度阈值之间,无大风或大雨大雪等极端天气。
50、当无人机飞行时遇到影响其正常运作的情况时,计算无人机的剩余可飞行里程的计算公式如下:
51、
52、其中r为剩余里程数,k1表示电池的温度影响系数,e为电池总容量(单位kwh),ω为电量的剩余百分比,k2表示负重影响系数,表示平均每公里的能耗(单位kwh/km)。k3表示风阻系数。
53、k1的计算公式如下:
54、
55、其中,t0表示第一温度阈值,t0>0,t1表示第二温度阈值,t1>0且t1>t0,最适温度在第一温度阈值与第二温度阈值之间,t表示当前温度。当t>2t1时,所述无人机飞行管控模块判定无人机存在飞行风险,对无人机采取迫降操作;当t≤-t0时,则认为温度过低,继续飞行会对电池造成损坏,所述无人机飞行管控模块对无人机采取迫降。
56、k2的计算公式如下:
57、
58、其中,m1表示无人机的重量,m2表示无人机当前的负重。
59、k3为风阻系数,不同的无人机在不同的风向、风速影响下有不同的取值,计算公式如下:
60、当风向与无人机飞行方向夹角小于90度,风力对无人机的飞行存在促进作用,k3计算公式如下:
61、
62、当风向与无人机飞行方向在90度到180度之间,风力对无人机的飞行存在阻碍作用,k3的计算公式如下:
63、
64、其中v1表示风速,v2表示无人机飞行速度,a,b,c是经验系数,可根据实际情况通过试验数据或领域专业知识对经验系数a、b、c进行调整,从而得到更准确的风阻系数。
65、第二距离计算单元获取最近可停靠点的位置,计算出无人机距离该停靠点的实时距离,第二距离判断单元将所述实时距离与所述里程计算单元计算出剩余可飞行里程数进行比较,如果所述剩余可飞行里程数大于所述实时距离且超过所述实时距离的第一比例值,则无人机继续正常飞行;如果所述剩余可飞行里程数大于所述实时距离但小于所述实时距离的第一比例值,则第二控制单元控制无人机飞往最近停靠点降落;如果所述剩余可飞行里程数小于所述实时距离,则第二控制单元控制无人机进行就地迫降,并在降落后控制无人机向所述管理平台发送位置信息,以供后续回收无人机。
66、基于方案模块3:无人机降落管控模块对收到降落指令的无人机进行管控。
67、无人机降落管控模块控制无人机向所指定的降落地点进行降落操作。
68、所述无人机降落管控模块控制无人机向所指定的降落地点进行降落操作,包括:
69、第三距离计算单元计算无人机与指定降落地点之间的实时距离,第三距离判断单元将所述实时距离与预设距离值进行比较判定,得到判定结果,无人机降落控制单元根据判定结果对无人机进行相应的控制;如果所述实时距离大于第二距离阈值,无人机降落控制单元控制无人机向降落点水平飞行;如果所述实时距离不大于第二距离阈值,无人机降落控制单元控制无人机向指定降落点直线飞行。
70、与现有技术相比,本发明方案提出的一种无人机设备管理平台,可以根据无人机的飞行状态,智能化地调整无人机飞行速度,飞行高度等,以及计算无人机的距离等信息;所述管理平台通过划分网格的方式,根据一定条件智能实时计算同一网格或相邻网格内的无人机之间的距离,预测无人机是否会相撞,相比于计算全部无人机之间的距离,可以很大程度的减少计算量,加快系统的计算以及预测速度,更快地得到结果以便更快的做出预警与避让;对无人机续航情况进行实时监控并智能化判断,当续航里程不足时自动采取相应措施,智能停靠在最近降落平台,避免事故,所述管理平台极大程度地减少了人工管理,节省了人力资源。
本文地址:https://www.jishuxx.com/zhuanli/20240919/298727.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。