一种基于RFID的机器人防碰撞调度方法及系统
- 国知局
- 2024-09-19 14:30:19
本发明涉及机器人调度,尤其涉及一种基于rfid的机器人防碰撞调度方法及系统。
背景技术:
1、在智能仓储系统中,多个搬运机器人之间的协调和调度需要更好的鲁棒性和容错能力,才能够提高执行任务的能力和效率。
2、传统的中央调度方案,虽然能够有效分配任务和离线规划轨迹,但是无法有效保障大量搬运机器人在无红绿灯路口等场景下的实时安全。
3、集中式调度方案,虽然通过在路口附近设置类似区域控制器的设施,来收集区域内的所有机器人的运行信息,从而逻辑上同步地为可操控的机器人进行决策规划,但是会因为车辆数目的增加而加重计算的负担。
4、与此同时,分布式调度方案逐渐成为一种重要的研宄方案。在该分布式调度方案中,所有机器人会以广播的方式收集信息并在机器人上进行独立决策。其中,虽然结点的决策是分布式的,但是为了保障通信的可靠性和调度的准确性,往往仍然需要中央结点处理通信碰撞和分发策略网络模型等,导致整体成本高昂。
5、因此,现有技术还有待改进。
技术实现思路
1、针对现有技术缺陷,本发明提供一种基于rfid的机器人防碰撞调度方法及系统,旨在解决目前的分布式调度方案往往需要中央结点处理通信碰撞和分发策略网络模型等,导致成本高昂的技术问题。
2、本发明解决上述技术问题所采用的技术方案如下:
3、第一方面,本发明提供一种基于rfid的机器人防碰撞调度方法,包括步骤:
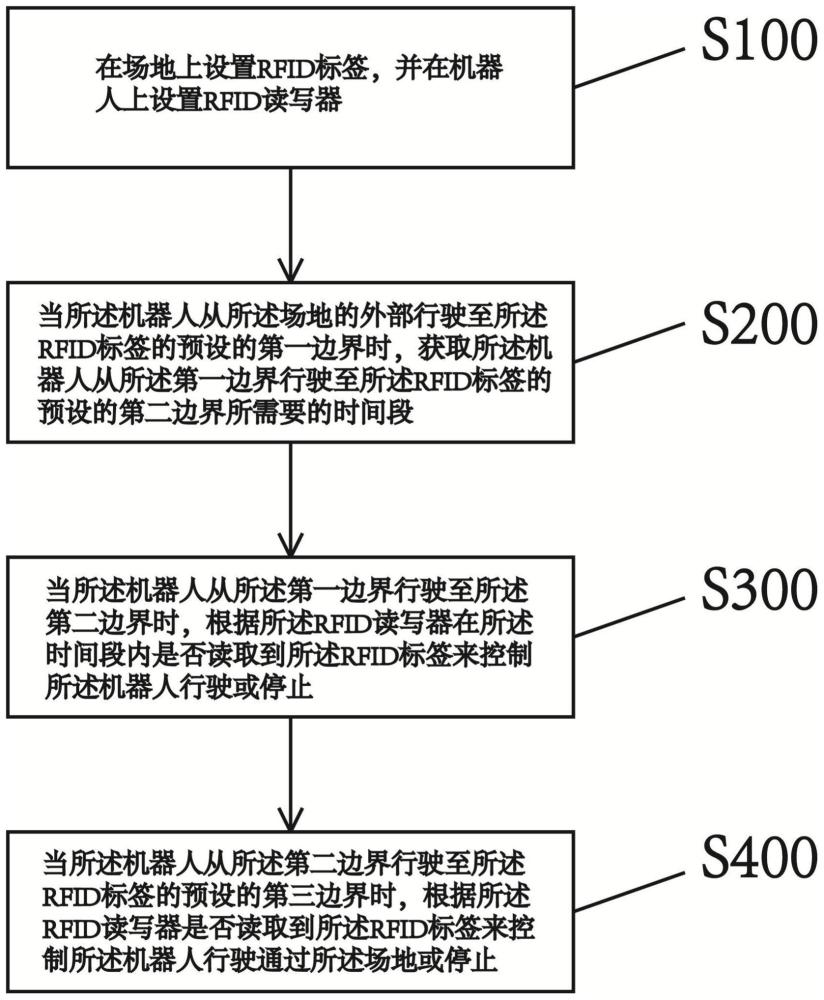
4、在场地上设置rfid标签,并在机器人上设置rfid读写器;
5、当所述机器人从所述场地的外部行驶至所述rfid标签的预设的第一边界时,获取所述机器人从所述第一边界行驶至所述rfid标签的预设的第二边界所需要的时间段;
6、当所述机器人从所述第一边界行驶至所述第二边界时,根据所述rfid读写器在所述时间段内是否读取到所述rfid标签来控制所述机器人行驶或停止;
7、当所述机器人从所述第二边界行驶至所述rfid标签的预设的第三边界时,根据所述rfid读写器是否读取到所述rfid标签来控制所述机器人行驶通过所述场地或停止。
8、在一些实施例中,所述第一边界、所述第二边界、以及所述第三边界依次以所述rfid标签为中心。
9、在一些实施例中,在所述当所述机器人从所述第一边界行驶至所述第二边界时,根据所述rfid读写器在所述时间段内是否读取到所述rfid标签来控制所述机器人行驶或停止的步骤之前还包括:
10、将所述rfid读写器的会话设置为单目标方式并关注所述rfid标签的a状态。
11、在一些实施例中,所述当所述机器人从所述第一边界行驶至所述第二边界时,根据所述rfid读写器在所述时间段内是否读取到所述rfid标签来控制所述机器人行驶或停止的步骤包括:
12、若所述rfid读写器在所述时间段内未读取到所述rfid标签,控制所述机器人停止;
13、若所述rfid读写器在所述时间段内读取到所述rfid标签且所述rfid标签的rssi值大于预设的阈值,控制所述机器人停止;
14、若所述rfid读写器在所述时间段内读取到所述rfid标签且所述rssi值小于或等于所述阈值,控制所述机器人行驶。
15、在一些实施例中,若所述rfid读写器在所述时间段内读取到所述rfid标签且所述rssi值大于所述阈值,将所述rfid标签的会话设置为双目标方式并关注所述rfid标签的a状态,控制所述机器人停止。
16、在一些实施例中,当所述机器人从所述第二边界行驶至所述第三边界时,将所述rfid读写器的会话设置为单目标方式并关注所述rfid标签的a状态,根据所述rfid读写器是否读取到所述rfid标签来控制所述机器人行驶通过所述场地或停止。
17、在一些实施例中,所述当所述机器人从所述第二边界行驶至所述rfid标签的预设的第三边界时,根据所述rfid读写器是否读取到所述rfid标签来控制所述机器人行驶通过所述场地或停止的步骤包括:
18、若所述rfid读写器读取到所述rfid标签,控制所述机器人行驶通过所述场地;若所述rfid读写器未读取到所述rfid标签,控制所述机器人停止,直至所述rfid读写器读取到所述rfid标签。
19、在一些实施例中,所述获取所述机器人从所述第一边界行驶至所述rfid标签的预设的第二边界所需要的时间段的步骤包括:
20、获取所述机器人的当前速度,利用所述当前速度计算所述时间段。
21、在一些实施例中,所述机器人的数量为多个,且所述机器人与所述rfid读写器一一对应。
22、第二方面,本发明提供一种基于rfid的机器人防碰撞调度系统,包括:
23、rfid标签,设置在场地上;
24、rfid读写器,设置在机器人上,用于读取所述rfid标签的信号;
25、控制终端,设置在所述机器人上,与所述rfid读写器通信连接,用于从所述rfid读写器接收所述rfid标签的所述信号;用于当所述机器人从所述场地的外部行驶至所述rfid标签的预设的第一边界时,获取所述机器人从所述第一边界行驶至所述rfid标签的预设的第二边界所需要的时间段;用于当所述机器人从所述第一边界行驶至所述第二边界时,根据所述rfid读写器在所述时间段内是否读取到所述rfid标签来控制所述机器人行驶或停止;并用于当所述机器人从所述第二边界行驶至所述rfid标签的预设的第三边界时,根据所述rfid读写器是否读取到所述rfid标签来控制所述机器人行驶通过所述场地或停止。
26、有益效果:本发明提供的基于rfid的机器人防碰撞调度方法,根据基于rfid的状态切换协议和三个边界的设定,使得搬运机器人能够根据本地信息自主协调在无红绿灯路口等场景下的调度,无需额外的协调单元和复杂昂贵的中央结点来处理通信碰撞和分发策略网络模型等,实现多机器人的自主调度,从而大幅度降低成本。
技术特征:1.一种基于rfid的机器人防碰撞调度方法,其特征在于,包括:
2.根据权利要求1所述的基于rfid的机器人防碰撞调度方法,其特征在于,所述第一边界、所述第二边界、以及所述第三边界依次以所述rfid标签为中心。
3.根据权利要求1所述的基于rfid的机器人防碰撞调度方法,其特征在于,在所述当所述机器人从所述第一边界行驶至所述第二边界时,根据所述rfid读写器在所述时间段内是否读取到所述rfid标签来控制所述机器人行驶或停止的步骤之前还包括:
4.根据权利要求1所述的基于rfid的机器人防碰撞调度方法,其特征在于,所述当所述机器人从所述第一边界行驶至所述第二边界时,根据所述rfid读写器在所述时间段内是否读取到所述rfid标签来控制所述机器人行驶或停止的步骤包括:
5.根据权利要求4所述的基于rfid的机器人防碰撞调度方法,其特征在于,若所述rfid读写器在所述时间段内读取到所述rfid标签且所述rssi值大于所述阈值,将所述rfid标签的会话设置为双目标方式并关注所述rfid标签的a状态,控制所述机器人停止。
6.根据权利要求1所述的基于rfid的机器人防碰撞调度方法,其特征在于,当所述机器人从所述第二边界行驶至所述第三边界时,将所述rfid读写器的会话设置为单目标方式并关注所述rfid标签的a状态,根据所述rfid读写器是否读取到所述rfid标签来控制所述机器人行驶通过所述场地或停止。
7.根据权利要求1所述的基于rfid的机器人防碰撞调度方法,其特征在于,所述当所述机器人从所述第二边界行驶至所述rfid标签的预设的第三边界时,根据所述rfid读写器是否读取到所述rfid标签来控制所述机器人行驶通过所述场地或停止的步骤包括:
8.根据权利要求1所述的基于rfid的机器人防碰撞调度方法,其特征在于,所述获取所述机器人从所述第一边界行驶至所述rfid标签的预设的第二边界所需要的时间段的步骤包括:
9.根据权利要求1-8任一项所述的基于rfid的机器人防碰撞调度方法,其特征在于,所述机器人的数量为多个,且所述机器人与所述rfid读写器一一对应。
10.一种基于rfid的机器人防碰撞调度系统,其特征在于,包括:
技术总结本发明涉及机器人调度技术领域,公开了一种基于RFID的机器人防碰撞调度方法及系统。方法包括步骤:在场地上设置RFID标签,并在机器人上设置RFID读写器;当机器人从场地的外部行驶至RFID标签的预设的第一边界时,获取机器人从第一边界行驶至RFID标签的预设的第二边界所需要的时间段;当机器人从第一边界行驶至第二边界时,根据RFID读写器在时间段内是否读取到RFID标签来控制机器人行驶或停止;当机器人从第二边界行驶至RFID标签的预设的第三边界时,根据RFID读写器是否读取到RFID标签来控制机器人行驶通过场地或停止。本方法根据基于RFID的状态切换协议和三个边界的设定,实现多机器人的自主调度,从而大幅度降低成本。技术研发人员:张旭,林志赟,郭静受保护的技术使用者:南方科技大学技术研发日:技术公布日:2024/9/17本文地址:https://www.jishuxx.com/zhuanli/20240919/298479.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表