一种面向环岛观测任务的水面无人艇路径规划方法
- 国知局
- 2024-09-19 14:28:41
本发明涉及机器人路径规划领域,具体的说是一种面向环岛观测任务的水面无人艇路径规划方法。
背景技术:
1、水面无人艇作为目前主要的海上自主移动平台在水文测量、水质监测、海上巡逻等场景中广泛应用。将水面无人艇应用于环岛观测任务,对于岛礁长期规划和可持续发展至关重要。路径规划作为水面无人艇的关键技术之一,能否根据任务需求及环境条件设计一条有效和最优的路径是一个关键问题,其有效性不仅决定了水面无人艇自主性,也影响任务执行的可靠性和效率。然而,由于岛礁地理环境的特殊性对水面无人艇路径规划带来了新的挑战:首先,针对于旅行商问题多数路径规划方法将任务点视为质点,进而获取合适路径,岛礁具有较大的几何尺寸,任务点处的资源消耗,将影响路径的可行性,规划路径中入岛点及出岛点位置选择也将导致岛礁间航行距离变化;其次,近海浅水环境中,海岸的大小随潮汐动态变化,不同时刻的航行成本与能否通行也将随之变化;此外,由于时空动态变化和出入点选择的耦合效应,岛礁观测次序与出入点选择将随时间动态变化。在诸多挑战下,目前,针对环岛观测任务路径规划算法研究较少,大多用于环岛观测任务的水面无人艇仍需依靠人工设定搜索路径,无法实现自动化作业,对环岛观测任务的高效性及安全性产生较大的影响。因此,设计一种面向环岛观测任务的水面无人艇路径规划方法对岛礁可持续发展是至关重要的。
技术实现思路
1、针对现有路径规划方法无法满足环岛观测任务需求,本文发明提供了一种面向环岛观测任务的水面无人艇路径规划方法。通过把环绕岛礁的待观测区域从时间和空间角度离散为一组环绕岛礁的路径节点,将强时空耦合的多岛礁近岛观测任务转为旅行商问题,然后使用改进蚁群算法对其求解,有效的选择水面无人艇的入岛点和出岛点位置,从而降低航行成本。
2、本发明的技术方案如下:一种面向环岛观测任务的水面无人艇路径规划方法,包括以下步骤:
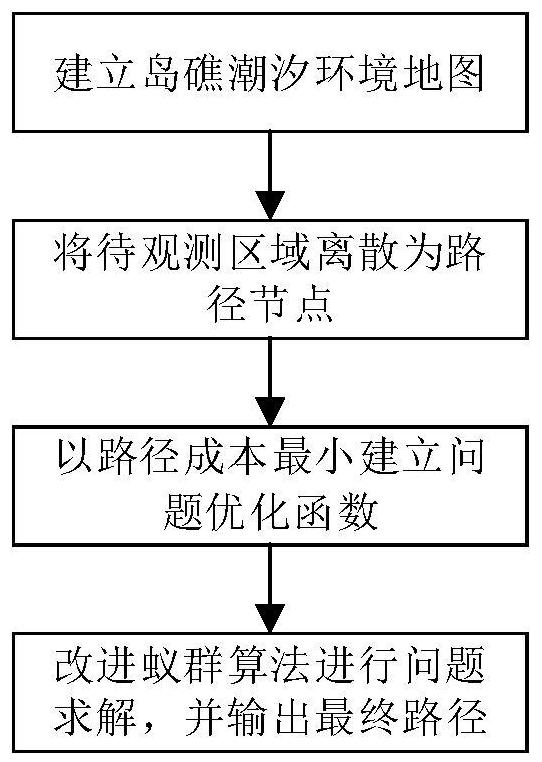
3、步骤1:获取海图数据和潮汐数据,利用栅格法建立岛礁潮汐环境地图;
4、步骤2:利用岛礁潮汐环境地图,将环绕岛礁的待观测区域从时间和空间角度离散为一组环绕岛礁的路径节点,完成所有路径节点遍历,即可完成任务观测,以将潮汐环境下多岛礁近距离环岛观测任务转为求解旅行商问题;
5、步骤3:以路径成本最小建立旅行商问题优化函数;
6、步骤4:通过改进状态转移规则,并增加局部优化策略,得到改进蚁群算法,采用改进蚁群算法求解步骤3建立的旅行商问题优化函数,获取全局最优路径。
7、所述步骤1中,获取海图数据和潮汐数据,利用栅格法建立岛礁潮汐环境地图,包括以下步骤:
8、利用电子海图得到包含水深点、等深线的水深数据;
9、按照地图尺寸对应关系,在栅格图对应位置添加水深数据,通过最近邻插值法对栅格图中水深点、等深线进行插值,以填充栅格图数据,建立静态水深栅格地图d;
10、获取潮汐数据,将潮汐数据离散化处理,得到潮汐在t时刻潮位值t(t),通过将潮汐数据与静态水深栅格地图数据叠加,建立岛礁潮汐环境地图。
11、所述步骤2,具体如下:
12、步骤2.1:在静态水深栅格地图中,由岛礁b确定的岛礁a中初始出入点位置为:
13、
14、
15、
16、其中:为岛礁a中初始出入点,xa_b为岛礁a海岸边界上距离岛礁b最近的节点,为岛礁a已获取的初始出入点中分别距离最近的节点;r为设定的两个相邻初始出入点之间路径长度;l为初始出入点间最短路径长度,0<l<r;
17、重复此过程直至获取所有岛礁在岛礁a中确定的初始出入点位置;
18、步骤2.2:在静态水深栅格地图中,通过判断岛礁a中两相邻初始出入点间距离是否大于2l1获取岛礁的初始非出入点区域u,其中l1为设定的两个相邻初始非出入点之间距离;在初始非出入点区域u中,沿顺时针方向,以距离为l1依次切割,获取初始非出入点,直至剩余区域小于l1;
19、重复此过程直至获取岛礁a中所有的初始非出入点位置;
20、步骤2.3:将岛礁a中初始出入点与初始非出入点引入岛礁潮汐环境地图,分别在所引入的初始出入点与初始非出入点处建立垂直于岛礁海岸边界的直线,将t时刻安全水深边界向海洋方向以l2距离进行膨胀,则膨胀后边界与直线交点,为初始出入点与初始非出入点在t时刻所对应的出入点与非出入点,即可获取岛礁a中路径节点集合;其中l2为水面无人艇与安全水深边界需保持的安全距离;
21、重复步骤2.1至步骤2.3,,直至获取所有岛礁的出入点与非出入点都被建立。所述步骤2.3中,t时刻安全水深边界为:
22、f(t)={s(t)|s(t)=hsafe}
23、其中:hsafe为水面无人艇的最小安全水深值,s(t)为t时刻岛礁潮汐环境地图。
24、所述步骤3中,以路径成本最小建立旅行商问题优化函数,具体如下:
25、给定n个任务目标,由步骤2获得的每个岛出入点与非出入点数量之和的集合为z=(z1,z2,...,zn)以及各点间的距离d;通过分别建立t时刻各岛礁内和岛礁间的路径成本,以建立水面无人艇旅行商问题的路径成本,优化函数为:
26、
27、其中,表示水面无人艇是否从与移动到是则值为1,否则值为0;分别表示t时刻岛礁a的第n个路径节点与第m个路径节点;表示t时刻岛礁b的第m个路径节点。xa_b为岛礁a海岸边界上距离岛礁b最近的节点,为岛礁a已获取的初始出入点中分别距离最近的节点;r为设定的两个相邻初始出入点之间路径长度;l为初始出入点间最短路径长度,0<l<r;
28、所述步骤4中,改进蚁群算法包括以下步骤:
29、步骤4.1:设定蚁群算法初始化参数,包括最大迭代次数ite、蚁群数量m、信息素偏重系数α、启发式函数的偏重系数β、信息素挥发因子ρ、常系数q、出发时间t0、水面无人艇航行速度v以及出入点选择概率q0;
30、步骤4.2:通过改进状态转移规则,计算下一路径节点选择概率;
31、步骤4.3:采用轮盘赌法选择下一路径节点,计算蚂蚁当前经过路径长度,并更新时间t,重复步骤4.2和步骤4.3直至所有蚂蚁构建完成路径;
32、步骤4.4:选择前10%距离最短的路径,采用局部优化策略进行优化,更新优化后路径以及路径长度;
33、步骤4.5:更新信息素浓度,记录当前迭代中最优解;
34、步骤4.6:判断是否达到最大迭代次数,达到则迭代终止,并输出规划路径,若否则返回步骤4.2。
35、所述步骤4.2中,改进状态转移规则具体包括:
36、通过在出入点处设置出入点选择概率q0,其中q0∈[0,1],并结合路径节点间对应关系,确定下一点选择路径节点候选集:
37、定义二维矩阵sign,sign(i,j)表示路径节点i与路径节点j对应关系:
38、
39、其中,po表示所有出入点组成的路径节点集合;ci_j表示连接路径节点i与路径节点j的直线段是否穿过岛礁;若穿过值为0,反之则为1;pn表示点i左侧和右侧邻域点所组成的路径节点集合;
40、t时刻,蚂蚁m从点i到点j由改进状态转移规则计算的概率为:
41、
42、
43、
44、
45、其中,pr表示蚂蚁m可选择的路径节点集合;pc表示蚂蚁m未访问的路径节点集合;pd表示二维矩阵sign的第i行中满足sign>0的可访问路径节点集合;pe表示二维矩阵sign的第i行中满足sign=1的可访问路径节点组成的集合;pf表示二维矩阵sign的第i行中满足sign=0的可访问路径节点组成的集合;q表示一个随机数,0≤q≤1;τ(i,j)为从点i到点j的信息浓度;η(i,j,t)为t时刻从点i到点j的启发式函数,η=1/d;d表示每个岛出入点与非出入点各点间的距离。
46、所述步骤4.4中,局部优化策略具体包括:
47、对每次迭代中前10%距离最短的路径进行局部优化,规划的路径从空间角度分为岛礁内路径及岛礁间路径;
48、岛礁间路径优化为优化路径交叉问题,采用2-opt算子进行解决;
49、岛礁内路径优化为优化重复观测问题,借助岛礁内点的空间特性,提出最优路径搜索算法进行求解;所述最优路径搜索算法,包括以下步骤:
50、a.通过步骤2分别获取不同岛礁中路径节点集合,在不同岛礁中,任意选择一点作为该岛礁内路径起始点,采用距离最短获取下一路径节点,直至将该岛礁内所有路径节点组成一条完整路径,以此获取不同岛礁内的最优路径中路径节点访问顺序,不同岛礁路径集合表示为x={x1,x2,...,xn};
51、b.选择待优化路径,根据该路径中路径节点的访问顺序,从该路径选择一段从入岛至出岛的连续路径pb,并确保组成该路径的路径节点,能在x中组成一段连续路径;
52、c.记pb中路径节点在x中对应的一段连续路径的两端点分别为x1、x2,将待优化路径中pb路径段分别采用由节点顺序为x1至x2所组成的路径以及由节点顺序为x2至x1所组成的路径进行替换,并分别计算路径长度,以距离最短更新路径及路径长度;
53、d.判断整条路径是否全部完成优化,完成则结束,未完成则返回步骤b继续选取进行优化。
54、一种面向环岛观测任务的水面无人艇路径规划系统,包括:
55、岛礁地图构建模块,用于获取海图数据和潮汐数据,利用栅格法建立岛礁潮汐环境地图;
56、任务转化模块,用于利用岛礁潮汐环境地图,将环绕岛礁的待观测区域从时间和空间角度离散为一组环绕岛礁的路径节点,完成所有路径节点遍历,即可完成任务观测,以将潮汐环境下多岛礁近距离环岛观测任务转为求解旅行商问题;
57、优化函数构建模块,用于以路径成本最小建立旅行商问题优化函数;
58、路径优化模块,用于通过改进状态转移规则,并增加局部优化策略,得到改进蚁群算法,采用改进蚁群算法求解步骤3建立的旅行商问题优化函数,获取全局最优路径。
59、一种面向环岛观测任务的水面无人艇路径规划装置,包括存储器和处理器;所述存储器,用于存储计算机程序;所述处理器,用于当执行所述计算机程序时,实现所述的一种面向环岛观测任务的水面无人艇路径规划方法。
60、本发明具有以下有益效果及优点:
61、本发明通过分别从时空角度将环岛待观测区域分解为t时刻出入点与非出入点集,为后续全局路径规划正确选择水面无人艇的入岛点和出岛点位置提供了可能;通过改进状态转移规则,有效选择出入点位置,增强算法寻优能力,从而降低路径成本;此外,采用局部优化策略对前10%距离最短的路径进行优化,降低重复观测及路径交叉问题。该方法可以有效选择水面无人艇的入岛点和出岛点位置,增强算法寻优能力,降低重复观测及路径交叉问题,从而降低路径成本,得到最优路径。
本文地址:https://www.jishuxx.com/zhuanli/20240919/298300.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表