船舶自动行驶方法、装置、设备及存储介质与流程
- 国知局
- 2024-09-19 14:29:54
本发明涉及船舶,尤其涉及一种船舶自动行驶方法、装置、设备及存储介质。
背景技术:
1、近年来,我国深海养殖业快速发展,网箱、工船等大型养殖装备在处于远离陆地的深远海海域,运输距离较远,海况较为复杂,现有的深海养殖渔资调配多依赖经验判断,缺乏对多种因素的考虑,导致海上物资补给及调配成本较高、效率较低。海洋运输在当前各国之间的贸易中扮演着极其重要的角色。而船舶的路径规划问题一直深刻影响着海洋运输的发展,并且其逐步向智能化方向发展。近年来,随着各种智能算法的提出和广泛应用,路径规划问题研究取得了较好成果,但也存在一些问题。
2、智能船舶路径规划是实现船舶自主航行的首要技术,具体为基于电子海图信息和船舶感知到的环境信息构建航行环境模型,然后基于航行环境模型和航行任务进行自主路径规划。但是目前基于智能船舶的实际运行情况,要求路径规划算法的执行效率高,在养殖船进行无人投喂过程中仍然难以根据船舶实时状况进行路径自动规划。
技术实现思路
1、本发明的主要目的在于提供一种船舶自动行驶方法、装置、设备及存储介质,旨在解决现有技术中养殖船进行无人投喂过程中难以根据船舶实时状况进行路径自动规划的技术问题。
2、为实现上述目的,本发明提供了一种船舶自动行驶方法,所述方法包括以下步骤:
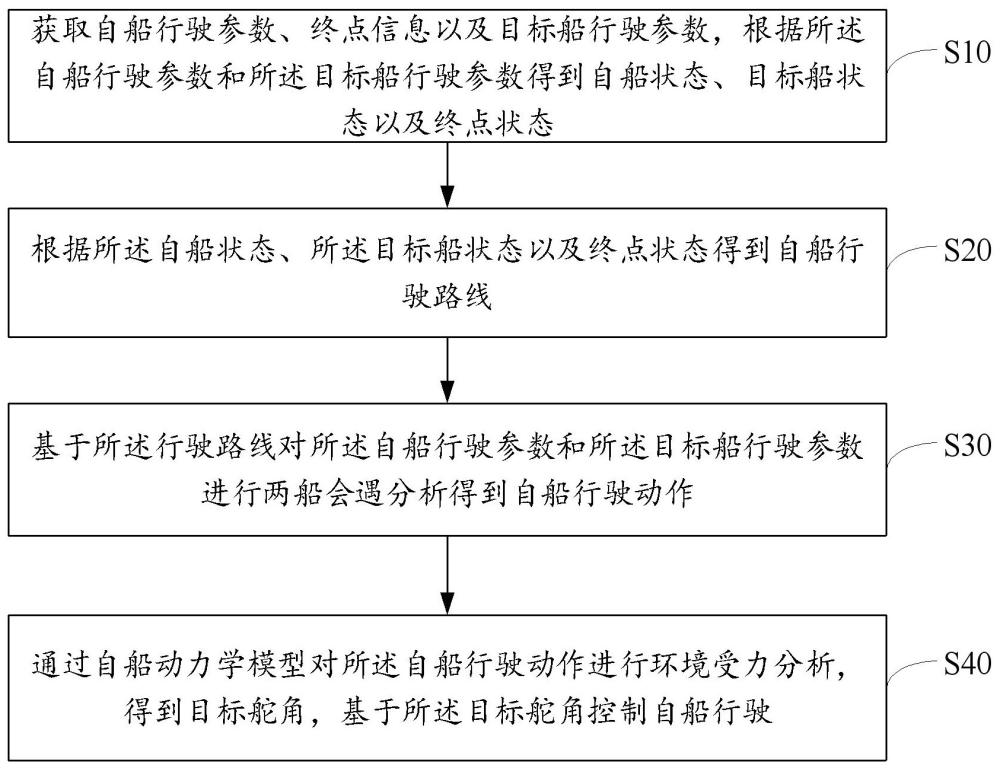
3、获取自船行驶参数、终点信息以及目标船行驶参数,根据所述自船行驶参数和所述目标船行驶参数得到自船状态、目标船状态以及终点状态;
4、根据所述自船状态、所述目标船状态以及所述终点状态得到自船行驶路线;
5、基于所述行驶路线对所述自船行驶参数和所述目标船行驶参数进行两船会遇分析得到自船行驶动作;
6、通过自船动力学模型对所述自船行驶动作进行环境受力分析,得到目标舵角,基于所述目标舵角控制自船行驶。
7、可选地,所述获取自船行驶参数、终点信息以及目标船行驶参数,根据所述自船行驶参数和所述目标船行驶参数得到自船状态、目标船状态以及终点状态,包括:
8、获取自船行驶参数、终点信息以及目标船行驶参数;
9、根据所述自船行驶参数构建自船运动模型,根据所述自船运动模型得到自船状态;
10、根据自船行驶参数和目标船行驶参数得到目标船状态;
11、根据自船行驶参数和终点信息得到终点状态。
12、可选地,所述根据所述自船状态、所述目标船状态以及所述终点状态得到自船行驶路线,包括:
13、对所述自船状态、所述目标船状态以及所述终点状态进行归一化处理,得到状态参数;
14、根据预设主线任务和预设辅线任务构建奖励函数;
15、根据所述状态参数和所述奖励函数得到自船行驶路线。
16、可选地,所述基于所述行驶路线对所述自船行驶参数和所述目标船行驶参数进行两船会遇分析得到自船行驶动作,包括:
17、根据自船行驶参数和目标船行驶参数得到两船会遇局面;
18、根据所述行驶路线和所述两船会遇局面得到自船和目标船的相对舷角、相对航向以及航速;
19、根据所述相对舷角、所述相对航向以及所述航速进行分析,得到自船行驶动作。
20、可选地,所述通过自船动力学模型对所述自船行驶动作进行环境受力分析,得到目标舵角,基于所述目标舵角控制自船行驶之前,还包括:
21、获取养殖环境下的自船试验参数;
22、根据所述自船试验参数进行流体动力和力矩进行分析,得到养殖环境影响参数;
23、基于所述养殖环境影响参数进行三自由度仿真试验,得到试验结果;
24、根据所述试验结果得到自船运动参量的关联等式;
25、根据所述关联等式构架自船动力学模型。
26、可选地,所述通过自船动力学模型对所述自船行驶动作进行环境受力分析,得到目标舵角,基于所述目标舵角控制自船行驶,包括:
27、基于自船动力学模型根据所述自船行驶参数得到自船航向变化量以及自船目标方位变化量;
28、根据所述自船航向变化量以及所述自船目标方位变化量得到目标舵角;
29、基于所述目标舵角控制自船行驶。
30、可选地,所述根据所述自船航向变化量以及所述自船目标方位变化量得到目标舵角,包括:
31、获取自动舵增益;
32、根据所述自船航向变化量以及所述自船目标方位变化量得到自船当前转艏角速度和目标航向;
33、根据所述自动舵增益、所述自船当前转艏角速度以及所述目标航向得到目标舵角。
34、此外,为实现上述目的,本发明还提出一种船舶自动行驶装置,所述船舶自动行驶装置包括:
35、参数获取模块,用于获取自船行驶参数、终点信息以及目标船行驶参数,根据所述自船行驶参数和所述目标船行驶参数得到自船状态、目标船状态以及终点状态;
36、线路规划模块,用于根据所述自船状态、所述目标船状态以及所述终点状态得到自船行驶路线;
37、自船自动行驶模块,用于基于所述行驶路线对所述自船行驶参数和所述目标船行驶参数进行两船会遇分析得到自船行驶动作;
38、所述自船自动行驶模块,还用于通过自船动力学模型对所述自船行驶动作进行环境受力分析,得到目标舵角,基于所述目标舵角控制自船行驶。
39、此外,为实现上述目的,本发明还提出一种船舶自动行驶设备,所述船舶自动行驶设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的船舶自动行驶程序,所述船舶自动行驶程序配置为实现如上文所述的船舶自动行驶方法的步骤。
40、此外,为实现上述目的,本发明还提出一种存储介质,所述存储介质上存储有船舶自动行驶程序,所述船舶自动行驶程序被处理器执行时实现如上文所述的船舶自动行驶方法的步骤。
41、本发明通过终点信息得到自船的完整行驶路径,但是基于行驶途中存在与其他船舶会遇的情况,可以进一步根据其他船舶的目标船行驶参数调整路径,并基于自船行驶路线上与目标船的会遇状况得到局部路径下自船的行驶动作,通过行驶动作在自船动力学模型下分析环境对该行驶动作的受力与影响得到自船的转向舵角,实现在局部路径下分析环境对自船行驶路径的影响,从而得到更加符合目标航向的目标舵角,控制自船更加准确地向终点行驶。
技术特征:1.一种船舶自动行驶方法,其特征在于,所述船舶自动行驶方法包括:
2.如权利要求1所述的船舶自动行驶方法,其特征在于,所述获取自船行驶参数、终点信息以及目标船行驶参数,根据所述自船行驶参数和所述目标船行驶参数得到自船状态、目标船状态以及终点状态,包括:
3.如权利要求1所述的船舶自动行驶方法,其特征在于,所述根据所述自船状态、所述目标船状态以及所述终点状态得到自船行驶路线,包括:
4.如权利要求1所述的船舶自动行驶方法,其特征在于,所述基于所述行驶路线对所述自船行驶参数和所述目标船行驶参数进行两船会遇分析得到自船行驶动作,包括:
5.如权利要求1所述的船舶自动行驶方法,其特征在于,所述通过自船动力学模型对所述自船行驶动作进行环境受力分析,得到目标舵角,基于所述目标舵角控制自船行驶之前,还包括:
6.如权利要求1所述的船舶自动行驶方法,其特征在于,所述通过自船动力学模型对所述自船行驶动作进行环境受力分析,得到目标舵角,基于所述目标舵角控制自船行驶,包括:
7.如权利要求6所述的船舶自动行驶方法,其特征在于,所述根据所述自船航向变化量以及所述自船目标方位变化量得到目标舵角,包括:
8.一种船舶自动行驶装置,其特征在于,所述船舶自动行驶装置包括:
9.一种船舶自动行驶设备,其特征在于,所述设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的船舶自动行驶程序,所述船舶自动行驶程序配置为实现如权利要求1至7中任一项所述的船舶自动行驶方法。
10.一种存储介质,其特征在于,所述存储介质上存储有船舶自动行驶程序,所述船舶自动行驶程序被处理器执行时实现如权利要求1至7任一项所述的船舶自动行驶方法。
技术总结本发明属于船舶技术领域,公开了一种船舶自动行驶方法、装置、设备及存储介质;该方法包括:根据自船行驶参数和目标船行驶参数得到自船状态、目标船状态以及终点信息;根据自船状态、目标船状态以及终点信息得到自船行驶路线;基于行驶路线进行两船会遇分析得到自船行驶动作;通过自船动力学模型对自船行驶动作进行环境受力分析,得到目标舵角,基于目标舵角控制自船行驶;本发明通过终点信息得到自船的完整行驶路径,基于路径中其他目标船行驶参数调整路径,得到调整后的行驶动作,通过行驶动作在自船动力学模型下分析环境对该行驶动作的影响,得到更加符合目标航向的目标舵角,控制自船更加准确地向终点行驶。技术研发人员:郑荣才,谢鸿伟,陈凯,元轲新,陈大勇,丁岚受保护的技术使用者:南方海洋科学与工程广东省实验室(湛江)技术研发日:技术公布日:2024/9/17本文地址:https://www.jishuxx.com/zhuanli/20240919/298437.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表