一种机械臂装置的制作方法
- 国知局
- 2024-09-23 14:16:23
本技术涉及半导体,具体地说,涉及一种机械臂装置。
背景技术:
1、机械臂装置广泛的应用与各个领域,如汽车制造,半导体制造等,其用于实现代替人工操作,以降低劳动强度,增加工作效率。
2、专利号为cn213967415u的专利中公开了一种自动旋涂机,包括上料冶具、夹爪组精密注射泵、点胶组件、旋涂主体、曝光组成品冶具、双层密封机壳、控制面板。虽然该自动旋涂机能够非常有效的提高旋涂的良品率,也能够提高旋涂的效率,但是该旋涂机种的夹具组件有两片夹爪,且为横插式拿取硅片的方法,这样的拿取方式使硅片受到两片夹爪相对的力,其在实际夹取时,硅片可能会向未受力的方向倾斜,导致夹取不稳,故有待改进。
技术实现思路
1、针对现有技术中存在的夹具组件有两片夹爪,且为横插式拿取硅片的方法,这样的拿取方式使硅片受到两片夹爪相对的力,其在实际夹取时,硅片可能会向未受力的方向倾斜,导致夹取不稳的问题。
2、为实现上述目的,本实用新型提供如下技术方案:
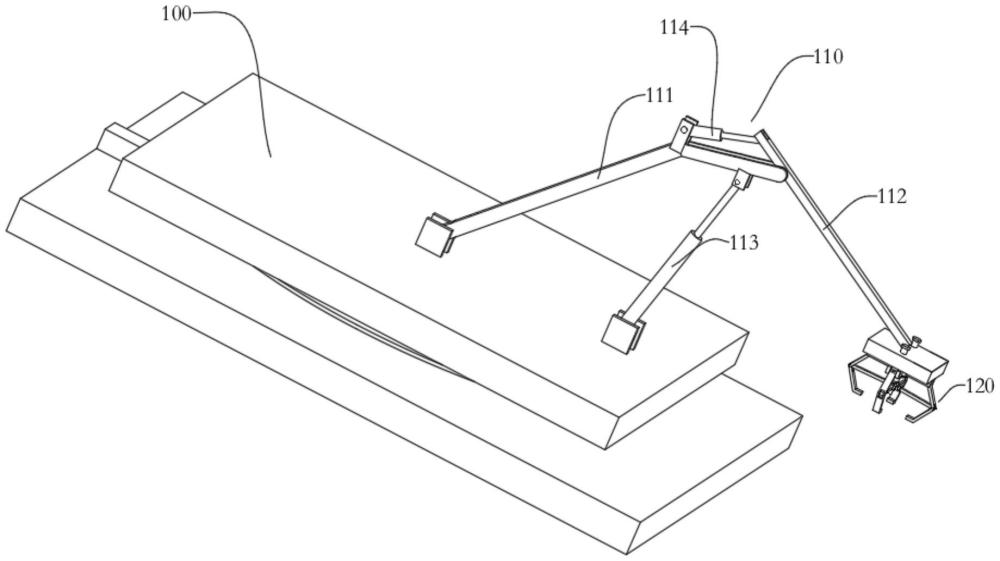
3、一种机械臂装置,包括底座、升降臂和夹持组件,升降臂可升降地设于底座上,夹持组件设于升降臂的一端上;夹持组件包括固连于升降臂一端的安装板,安装板的下端设有呈十字状的安装支架,安装支架的端部处铰接有夹爪,夹爪呈弯折状,夹爪的弯折处设有一端铰接连接于夹爪上的连接杆,连接杆的另一端均铰接连接于一升降支架上,安装支架的下端面且位于中部处设有用于驱动升降支架升降的驱动,升降支架上升用于驱动夹爪夹紧;安装板上设有用于对安装支架进行调平的调平组件。
4、进一步地,安装板内设有向下开口的安装腔,安装腔内设有连接轴和安装块,连接轴贯穿安装块设置,安装块的下端固连安装支架,调平组件包括螺栓和螺母,螺栓相对设于安装板两侧且贯穿安装板设置,螺母通过安装件安装在安装腔内,螺栓螺纹穿过对应的螺母抵紧安装支架的上端。
5、进一步地,座包括上底板和下底板,上底板通过转动轴转动连接于下底板,下底板上设有用于驱动上底板转动的驱动组件。
6、进一步地,驱动组件包括设于下底板上的电机,电机的输出轴上设有锥齿轮,上底板的底壁处设有安装环,安装环上设有锥齿,锥齿轮与锥齿相啮合。
7、进一步地,升降臂包括弯折的大臂和呈直线状的小臂,大臂的一端铰接连接于上底板,上底板铰接连接有第一伸缩杆,第一伸缩杆的伸缩端铰接连接于大臂的弯折部下端处,大臂的弯折处上端铰接连接有第二伸缩杆,小臂的一端固连安装板,小臂的另一端铰接连接于第二伸缩杆的输出端,小臂的中部铰接于大臂弯折部的端部处。
8、进一步地,安装支架的侧壁上设有水平仪。
9、进一步地,抓夹的底端弯折形成挤压部,挤压部上设有防滑纹。
10、与现有技术相比,本实用新型的有益效果是:
11、1、本实用新型,通过设置升降臂和四个相对的夹爪,使得夹取硅片时受力均匀,与现有的通过两片夹爪,且为横插式拿取相比,本实用新型能够通过设置升降臂和四个相对的夹爪,拿取硅片时,硅片四周受力更均匀,不会倾斜,且竖直拿取,从而保证拿取硅片时,硅片能够保持水平,后续旋涂时硅片上未固化的料浆不会滴落。
12、2、本实用新型,通过调平组件的设置,使得当安装支架歪斜时能够通过调平组件对安装支架进行调平,保证了安装支架的平衡,从而保证夹爪夹取物体的平衡。
技术特征:1.一种机械臂装置,其特征在于:包括底座(100)、升降臂(110)和夹持组件(120),升降臂(110)可升降地设于底座(100)上,夹持组件(120)设于升降臂(110)的一端上;夹持组件(120)包括固连于升降臂(110)一端的安装板(200),安装板(200)的下端设有呈十字状的安装支架(210),安装支架(210)的端部处铰接有夹爪(250),夹爪(250)呈弯折状,夹爪(250)的弯折处设有一端铰接连接于夹爪(250)上的连接杆(240),连接杆(240)的另一端均铰接连接于一升降支架(230)上,安装支架(210)的下端面且位于中部处设有用于驱动升降支架(230)升降的驱动件(220),升降支架(230)上升用于驱动夹爪(250)夹紧;安装板(200)上设有用于对安装支架(210)进行调平的调平组件。
2.根据权利要求1所述的一种机械臂装置,其特征在于:安装板(200)内设有向下开口的安装腔(300),安装腔(300)内设有连接轴(321)和安装块(320),连接轴(321)贯穿安装块(320)设置,安装块(320)的下端固连安装支架(210),调平组件包括螺栓(310)和螺母(311),螺栓(310)相对设于安装板(200)两侧且贯穿安装板(200)设置,螺母(311)通过安装件(312)安装在安装腔(300)内,螺栓(310)螺纹穿过对应的螺母(311)抵紧安装支架(210)的上端。
3.根据权利要求1所述的一种机械臂装置,其特征在于:底座(100)包括上底板(401)和下底板(402),上底板(401)通过转动轴(404)转动连接于下底板(402),下底板(402)上设有用于驱动上底板(401)转动的驱动组件。
4.根据权利要求3所述的一种机械臂装置,其特征在于:驱动组件包括设于下底板(402)上的电机(410),电机(410)的输出轴上设有锥齿轮(411),上底板(401)的底壁处设有安装环(403),安装环(403)上设有锥齿,锥齿轮(411)与锥齿相啮合。
5.根据权利要求4所述的一种机械臂装置,其特征在于:升降臂(110)包括弯折的大臂(111)和呈直线状的小臂(112),大臂(111)的一端铰接连接于上底板(401),上底板(401)铰接连接有第一伸缩杆(113),第一伸缩杆(113)的伸缩端铰接连接于大臂(111)的弯折部下端处,大臂(111)的弯折处上端铰接连接有第二伸缩杆(114),小臂(112)的一端固连安装板(200),小臂(112)的另一端铰接连接于第二伸缩杆(114)的输出端,小臂(112)的中部铰接于大臂(111)弯折部的端部处。
6.根据权利要求2所述的一种机械臂装置,其特征在于:安装支架(210)的侧壁上设有水平仪(211)。
7.根据权利要求1所述的一种机械臂装置,其特征在于:夹爪(250)的底端弯折形成挤压部,挤压部上设有防滑纹。
技术总结本技术涉及半导体技术领域,公开了一种机械臂装置,包括底座、升降臂和夹持组件,升降臂可升降地设于底座上,夹持组件设于升降臂的一端上;夹持组件包括固连于升降臂一端的安装板,安装板的下端设有呈十字状的安装支架,安装支架的端部处铰接有夹爪,夹爪的弯折处设有一端铰接连接于夹爪上的连接杆,连接杆的另一端均铰接连接于一升降支架上,安装支架的下端面且位于中部处设有用于驱动升降支架升降的驱动,升降支架上升用于驱动夹爪夹紧;安装板上设有用于对安装支架进行调平的调平组件。通过设置升降臂和四个相对的夹爪,使得夹取硅片时受力均匀,避免硅片倾斜,从而保证旋涂时硅片上未固化的料浆不会滴落。技术研发人员:鲁聪聪,陈慧受保护的技术使用者:上海邃铸科技有限公司技术研发日:20231027技术公布日:2024/9/19本文地址:https://www.jishuxx.com/zhuanli/20240923/301857.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表