一种插秧机侧深施肥液体肥控制方法及控制系统与流程
- 国知局
- 2024-10-09 16:15:33
本发明涉及施肥控制,特别是涉及一种插秧机侧深施肥液体肥控制方法及控制系统。
背景技术:
1、目前农业生产中主要使用固体颗粒肥料,颗粒肥料易结块、易堵塞的问题一直没有得到充分解决,施肥机具使用过程中易出现堵塞导致漏施的作业事故;使用液体肥料,通过直流电机驱动液泵实现排肥及输送。肥箱及排肥装置安装在插秧机底盘上,通过软管将液体肥料输送到后方栽植机构处。控制系统调节直流电机转速,控制液泵流量,实现按需变量施肥。液体输送系统结构简单,生产成本低;堵塞几率极小,作业效率高,维护保养方便。
2、此外施肥过程中靠机手经验操作,容易导致施肥不均匀;液体肥施肥机如果能够随前进速度的变化,实时改变施肥量大小,就既节约了化肥,又减少土壤和水资源污染。可能会因施肥量不均匀,导致局部肥量不足或烧苗。一款能够随速度变化实时调节出肥量的液体肥施肥机是非常需要的。
3、为了实现液体肥的自适应排肥,对液体肥进行流量标定以及对机具进行测速都是关键环节。现有技术中,对于液体肥排肥流量的标定都较为简单,标定的数值不够精确,若需要标定出准确的数值,需要花费较长的时间。另外,如专利cn 112913388 a等现有技术中,需要根据施肥机的移动速度具体计算车速再根据车速调节液泵运转,也即地轮测速与调节液泵的环节是相互独立的,这具有较大的计算与控制难度。此外,该专利中对于机具速度的计算是对地轮测得的速度与gps测得的速度进行比较,看两者的差值是否小于预设阈值,是则采用地轮测得的速度,否则采用卫星测得的速度,这种方式得到的速度的可信度低,无法满足更精确的测速要求,此外地轮测速适用于旱地测速,对于插秧机作业的泥泞田地中基于地轮进行测速不仅需要额外增加设施,而且测速不准确。
技术实现思路
1、发明目的:为了克服现有技术中存在的不足,本发明提供一种能够准确自适应调节液体肥的排肥量且控制难度较低的插秧机侧深施肥液体肥控制方法及控制系统。
2、技术方案:为实现上述目的,本发明的插秧机侧深施肥液体肥控制方法,该方法由控制系统实施,所述方法包括:
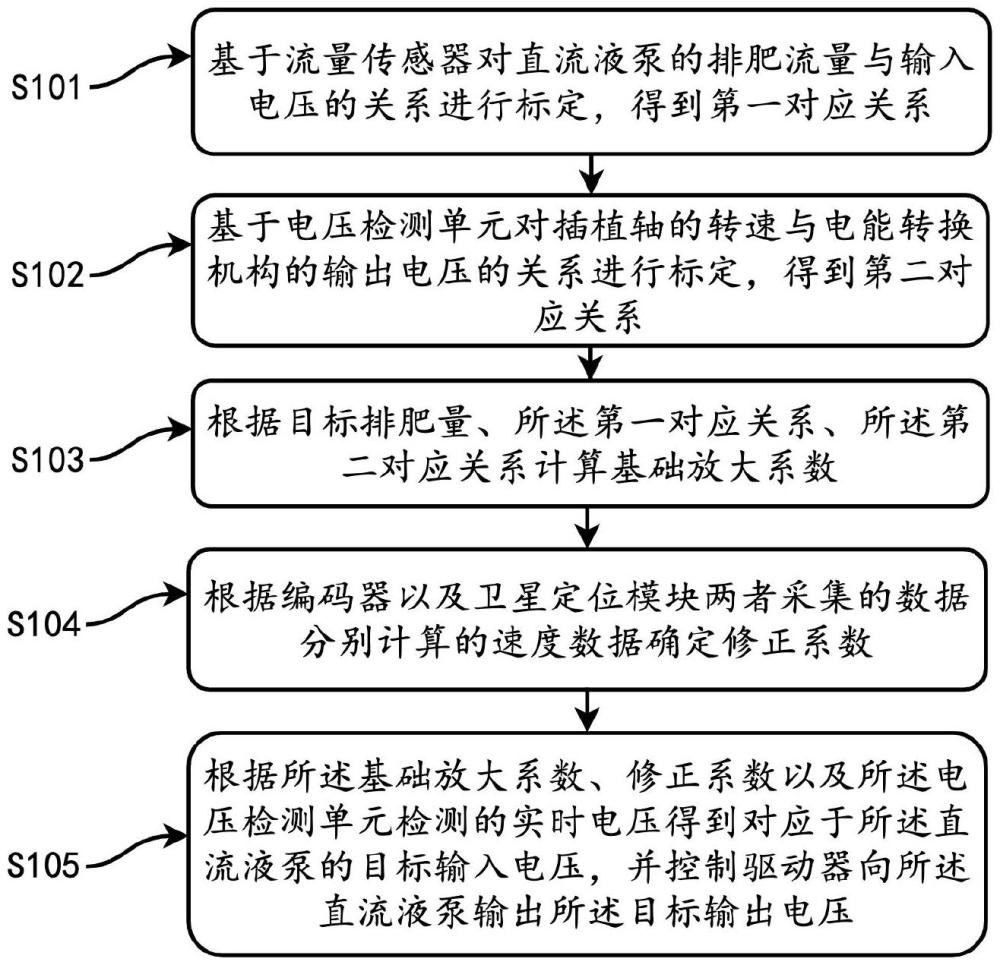
3、基于流量传感器对直流液泵的排肥流量与输入电压的关系进行标定,得到第一对应关系;
4、本步骤中,输入电压与排肥流量呈正比关系,输入电压越大,直流液泵的运转速度越大,排肥流量也即越大。
5、基于电压检测单元对插植轴的转速与电能转换机构的输出电压的关系进行标定,得到第二对应关系;
6、本步骤中,插植轴的转速与电能转换机构的输出电压也呈正比关系,插植轴转速越快,电能转换机构的转速越快,产生的电压也即越大。
7、根据目标排肥量、所述第一对应关系、所述第二对应关系计算基础放大系数;
8、本步骤中,目标排肥量为机具每移动单位距离排出的肥料的体积。为了保证土地上施肥机经过的位置的施肥量较为均匀且达到目标排肥流量,因此,直流液泵的运转速度需要随着机具的前进速度而相应改变。基于机具的移动位移与排肥量确定关系的原则,机具速度快时就需要提升直流液泵的排肥流量,机具速度慢时就需要降低直流液泵的排肥流量。基于所述第二对应关系能够计算出机具以速度v移动时插植轴的转速,也即能够确定机具以速度v移动时电能转换机构能够产生的理想输出电压;基于第一对应关系能够计算出理想状态下机具以速度v移动单位距离需要达到目标排肥量时,直流液泵的理想输入电压,具体地,以速度v移动单位距离s所需的时间为t=s/v,而需要在t的时间内排出目标排肥量l,则可知需要直流液泵的排肥流量为l/t,也即lv/s,基于第一对应关系可以得到该排肥流量对应的理想输入电压。理想输入电压与理想输出电压的比值即为基础放大系数,由上述推导可知,上述基础放大系数为只与目标排肥量相关的常数。
9、根据编码器以及卫星定位模块两者采集的数据分别计算的速度数据确定修正系数;
10、本步骤中,此处通过两种测速装置分别测速并进行优势互补,可以得到可信度更高的速度数据,基于可信度更高的速度数据对插植轴可能产生的偏差进行修正,可以有效提升排肥的准确度。
11、根据所述基础放大系数、修正系数以及所述电压检测单元8检测的实时电压得到对应于所述直流液泵的目标输入电压,并控制驱动器向所述直流液泵输出所述目标输出电压。
12、实际实施中,控制系统内可以存储有计算模型,计算模型的输入为电压检测单元测得的实时电压,输出为直流液泵的目标输入电压,所述输入与输出之间具有两级数值放大计算器,控制系统将其中一级数值放大计算器的放大数值设定为上述基础放大系数,该数值为常数,控制系统只需要根据修正系数动态控制另一级数值放大计算器的放大数值即可,控制简单。
13、进一步地,所述基于流量传感器对直流液泵的排肥流量与输入电压的关系进行标定,得到第一对应关系,包括:
14、设定控制寄存器,使得控制数据0-4096线性映射到控制信号0-5v,并进一步转换为直流电机驱动电压0-24v;
15、将所述控制数据0-4096均匀划分为64级,每级代表控制数据的等间距增加;
16、逐步提升控制级别与电压:每隔2s时间,控制数据自动递增1级,相应地,驱动电压提升至下一预定级别,同时所述直流液泵的驱动电压同步以每2秒提升1级的方式,从0v平缓上升至24v,实现所述直流液泵排肥流量的逐步增加;
17、实时流量监测与记录:在标定过程中,流量传感器以200毫秒的间隔周期性采集直流液泵的流量数据,每个2秒时间段内累积10次测量值,并计算该时间段内的平均流量值,该平均流量值随后被存储于预设的寄存器中;
18、将64级控制数据对应的平均流量值与控制电压的参照关系存入所述寄存器中,形成第一参照数据库,并基于所述第一参照数据库进行数据拟合第一对应关系。其中控制电压即对应于对直流液泵的输入电压。
19、在实际作业过程中,所述的计算基础放大系数时,即通过根据第一参照数据库拟合得到的第一对应关系确定理想输入电压。
20、进一步地,所述基于电压检测单元对插植轴的转速与电能转换机构的输出电压的关系进行标定,得到第二对应关系,包括:
21、在0到预设最大机具速度之间按等步距选择多档测试速度;
22、本步骤中,测试速度为插秧机自身的理论移动速度,插秧机具有控制机具前进速度的控制装置(如控制手柄),通过控制装置能够测试各种各档理论移动速度,插植轴的转速会随着机具理论移动速度的改变而对应改变,如此,可以间接实现对插植轴转速的多档调节。
23、在所述插秧机处于架起的状态下,使插秧机的控制装置从第一档开始每隔特定时间增加一档测试速度,以驱动所述插植轴运转;
24、对应于每一档测试速度,通过所述编码器获取所述插植轴的转速数据,并通过所述电压检测单元每隔一个间隔时间检测一次所述电能转换机构的输出电压,以在对每一档所述测试速度的测试时段内得到对应于该档测试速度的多个输出电压,并求得平均值得到对应于该档所述测试速度的平均输出电压;
25、将各档所述测试速度与所述平均输出电压一一对应存入寄存器中,形成第二参照数据库,并基于所述第二参照数据库进行数据拟合得到所述第二对应关系。
26、在实际作业过程中,所述的计算基础放大系数时,即通过根据上述第二参照数据库拟合得到的第二对应关系确定理想输出电压。
27、进一步地,所述根据编码器以及卫星定位模块两者采集的数据分别计算的速度数据确定修正系数,包括:
28、基于由所述编码器采集的数据计算的第一速度v1以及由所述卫星定位模块采集的数据计算的第二速度v2两者计算综合速度vc;
29、基于所述综合速度vc以及所述第一速度v1计算所述修正系数,所述修正系数表示如下:
30、
31、其中,k为修正系数。
32、进一步地,中所述综合速度vc基于如下公式计算:
33、vc=αv1+(1-α)v2;
34、其中,α为的v1的权重;(1-α)为v2的权重。
35、上述自适应调整权重α的方法能够实现权重的自适应平滑过渡,保证速度在任何值时,均能够计算出可信度高的综合速度。
36、进一步地,计算所述目标输入电压之前,先对电压检测单元获得的电压数据进行平滑处理。如此,可以防止电压频繁跳动,增加控制难度。
37、一种插秧机侧深施肥液体肥控制系统,所述控制系统连接流量传感器、电压检测单元、编码器以及卫星定位模块,并能够实施上述的插秧机侧深施肥液体肥控制方法。
38、有益效果:本发明的插秧机侧深施肥液体肥控制方法及控制系统,具有如下有益效果:
39、(1)通过对直流液泵与插植轴的相关参数分别进行标定,利用电能转换机构产生的电压结合基础放大系数与修正系数直接实时改变直流液泵的输入电压,即可实时根据机具速度实时改变直流液泵的排肥流量。
40、(2)基于电能转换机构产生的电压数值进行放大,基于放大的数值通过驱动器控制直流液泵运转,且基础放大系数为常数只需要计算一次,控制系统只需要确定实时修正系数即可,计算简单,因此,上述方法是一种带有修正的驱动直流液泵运转的方法,本发明的方案相比于插植轴9直接机械连接直流液泵而言,具有能够满足更宽范围的排肥流量调节需要的优点,且能够实时对插植轴9产生的偏差进行修正补偿,相比于根据实时速度计算所需电压再控制驱动器输出相应电压的情况,本技术的方案具有基本无延迟的优点。
41、(3)对直流液泵进行标定的过程中,进行频繁采样,在每一级控制数据控制直流液泵运转过程中,采样10次得到10个流量值并求平均值的方式,可以有效避免流量波动造成测得的流量数据可能不准的情况,提升标定数据的准确度。
42、(4)对插植轴与电能转换机构输出电压之间关系进行标定过程中,采用频繁采样,在每一档测试速度驱动插植轴运转的测试时段中,采样多次得到多个测试电压并求平均值的方式,可以有效避免电压波动造成测得的电压数据可能不准的情况,提升了电压数据标定的准确度。
43、(5)基于综合速度对编码器产生的数据计算的速度进行修正,可以消除累积误差并避免机具打滑使得施肥量不够,自适应调整权重α的方法能够实现权重的自适应平滑过渡,保证速度在任何值时,均能够计算出可信度高的综合速度。
本文地址:https://www.jishuxx.com/zhuanli/20240929/312449.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表