一种支撑弹簧模型的制备方法及一体化干涉仪装置
- 国知局
- 2024-10-09 16:23:56
本发明涉及红外光谱仪,特别是涉及一种支撑弹簧模型的制备方法及一体化干涉仪装置。
背景技术:
1、光谱分析在现代化工业生产与科学研究领域一直占有重要地位,它广泛应用于半导体工业、成分分析、环境监测等领域。作为光谱分析的核心,具有高灵敏度的红外光谱仪已经实现,但存在成本高、不易携带的问题,因此小型化是当前红外光谱仪研究的重要方向。基于微电子机械系统(micro-electro-mechanical system,mems)技术是实现红外光谱仪小型化的重要手段。
2、红外光谱仪一般分为色散型与干涉型两种。色散型红外光谱仪存在光通量低、光源能量损耗大、数据采集慢等缺点。干涉型红外光谱仪是基于对干涉后红外光进行傅里叶变换的原理,也被称为傅里叶红外光谱仪(fouriertransform infrared spectrometer,ftir spectrometer)。傅里叶红外光谱仪较色散型红外光谱仪具有分辨率高、波数精确度高、扫描速度快、灵敏度高等优点,因此傅里叶红外光谱仪是当前光谱仪研究的重点。
3、当前,对于傅里叶红外光谱仪,光谱仪中干涉仪形成的光程差越小,则红外光谱仪的分辨率越低,那么进一步获取的光谱信息准确率也会越低。而由于干涉仪中的支撑弹簧是限制干涉仪光程差的最大因素,而现有的叉骨式干涉仪依靠传统mems驱动器中的蛇形弹簧支撑,这种支撑弹簧适合传统驱动器x,y正交方向的位移,而不适合旋转驱动,导致驱动的位移角度小,反射镜光程差小。此外,反射镜安装困难,安装反射镜面不垂直,会导致反射光与入射光不平行,进而,使得红外光谱仪的分辨率低。因此,现有技术中的红外光谱仪中干涉仪形成的光程差较小,使得红外光谱仪的分辨率低,并进一步导致对物质结构和成分的分析精度低。
技术实现思路
1、本发明的目的是提供一种支撑弹簧模型的制备方法及一体化干涉仪装置,以解决现有技术中,红外光谱仪中中干涉仪形成的光程差较小,使得红外光谱仪的分辨率低,并进一步导致对物质结构和成分的分析精度低,以及反射镜安装困难的问题。
2、为实现上述目的,本发明提供了如下方案:
3、一种支撑弹簧模型的制备方法,包括:
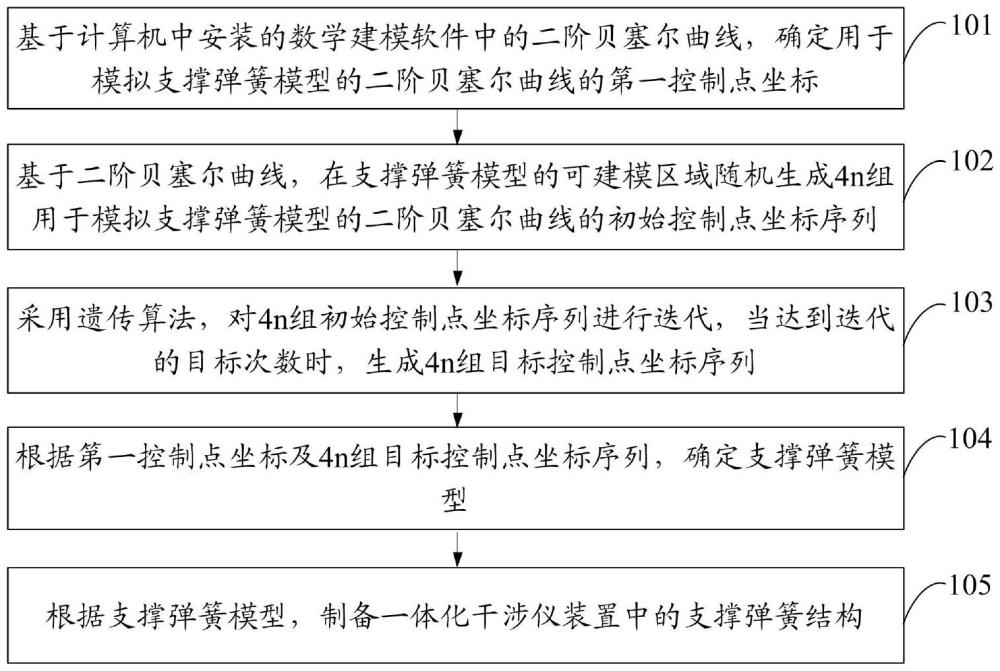
4、基于计算机中安装的数学建模软件中的二阶贝塞尔曲线,确定用于模拟支撑弹簧模型的二阶贝塞尔曲线的第一控制点坐标;
5、基于所述二阶贝塞尔曲线,在所述支撑弹簧模型的可建模区域随机生成4n组用于模拟所述支撑弹簧模型的二阶贝塞尔曲线的初始控制点坐标序列;所述初始控制点坐标序列包括所述二阶贝塞尔曲线的第二控制点横坐标、所述二阶贝塞尔曲线的第二控制点纵坐标、所述二阶贝塞尔曲线的第三控制点横坐标及所述二阶贝塞尔曲线的第三控制点纵坐标;4n为初始控制点坐标序列的个数,n为大于或等于1的正数;
6、采用遗传算法,对4n组所述初始控制点坐标序列进行迭代,当达到迭代的目标次数时,生成4n组目标控制点坐标序列;
7、根据所述第一控制点坐标及所述4n组目标控制点坐标序列,确定所述支撑弹簧模型;
8、根据所述支撑弹簧模型,制备一体化干涉仪装置中的支撑弹簧结构。
9、可选地,采用遗传算法,对4n组所述初始控制点坐标序列进行迭代,当达到迭代的目标次数时,生成4n组目标控制点坐标序列,具体包括:
10、采用遗传算法,对4n组所述初始控制点坐标序列进行迭代,当达到迭代的目标次数时,生成4n组目标控制点坐标序列;
11、每一次迭代包括:
12、根据所述第一控制点坐标及4n组当前控制点坐标序列,确定当前支撑弹簧模型;
13、对所述当前支撑弹簧模型对应的一体化干涉仪模型进行有限元仿真,确定4n组反射镜的旋转角度;所述反射镜的旋转角度为所述当前支撑弹簧所对应的一体化干涉仪模型的反射镜的旋转角度;所述一体化干涉仪模型用于制备所述一体化干涉仪装置;
14、基于所述4n组反射镜的旋转角度,确定4n组下一次迭代的控制点坐标序列。
15、可选地,对所述当前支撑弹簧模型对应的一体化干涉仪模型进行有限元仿真,确定4n组反射镜的旋转角度,之后具体包括:
16、根据所述4n组反射镜的旋转角度,确定所述一体化干涉仪模型的光程差。
17、可选地,根据所述4n组反射镜的旋转角度,确定所述一体化干涉仪模型的光程差,具体包括:
18、根据4n组反射镜的顺时针旋转角度,确定所述一体化干涉仪模型的第一光程差;
19、根据4n组反射镜的逆时针旋转角度,确定所述一体化干涉仪模型的第二光程差;
20、根据所述第一光程差及所述第二光程差,确定所述一体化干涉仪模型的光程差。
21、可选地,根据所述4n组反射镜的旋转角度,确定所述一体化干涉仪模型的光程差,之后具体包括:
22、根据所述一体化干涉仪模型的光程差,确定是否达到迭代的目标次数;
23、当所述一体化干涉仪模型的光程差大于或等于预设光程差时,确定达到迭代的目标次数;
24、当所述一体化干涉仪模型的光程差小于预设光程差时,确定未达到迭代的目标次数。
25、一种一体化干涉仪装置,包括:器件层、埋氧层及衬底层;
26、所述器件层包括驱动梳齿可动部分、驱动梳齿固定部分、感测梳齿可动部分、感测梳齿固定部分、支撑弹簧结构及固定外框;所述支撑弹簧结构为所述支撑弹簧模型的制备方法制备而成的支撑弹簧结构;所述器件层为桥式结构;所述器件层用于连接所述衬底层;
27、所述衬底层包括反射镜结构及平衡块结构;
28、所述埋氧层,设置于所述器件层与所述衬底层之间,用于所述器件层与所述衬底层之间的电气绝缘;
29、多个所述驱动梳齿可动部分的一端及多个所述感测梳齿可动部分的一端及多个所述支撑弹簧结构的一端均连接于所述器件层的可动件中心;
30、多个所述驱动梳齿固定部分与多个所述驱动梳齿可动部分一一对应设置;多个所述感测梳齿固定部分与多个所述感测梳齿可动部分一一对应设置;多个所述驱动梳齿固定部分及多个所述感测梳齿固定部分与所述固定外框为一体化设计;
31、所述反射镜结构包括第一反射镜结构和第二反射镜结构;所述第一反射镜结构与所述器件层的可动件中心连接;所述第二反射镜结构与所述器件层的可动件中心连接;所述第一反射镜结构和所述第二反射镜结构呈90度角且均用于对接收到的光线进行反射;所述反射镜结构与所述衬底层为一体化设计;所述反射镜结构为角锥镜;
32、所述平衡块结构包括第一平衡块结构和第二平衡块结构;所述第一平衡块结构和所述第二平衡块结构均与所述器件层的可动件中心连接;所述第一平衡块结构用于平衡所述第一反射镜;所述第二平衡块结构用于平衡所述第二反射镜;
33、多个所述支撑弹簧结构的一端与所述器件层的可动件中心连接;多个所述支撑弹簧结构的另一端与所述固定外框连接;多个所述支撑弹簧结构用于为多个所述驱动梳齿可动部分、多个所述感测梳齿可动部分及所述反射镜结构提供支撑力矩;
34、所述驱动梳齿可动部分与所述驱动梳齿固定部分,用于通过感应驱动电信号带动所述反射镜结构运动;
35、所述感测梳齿可动部分与所述感测梳齿固定部分,用于检测用于计算光程差的电容信号;所述电容信号从所述感测梳齿固定部分对应的电极输出。
36、可选地,所述反射镜的镜面为采用硬掩膜沉积反射层材料制备而成。
37、可选地,所述驱动梳齿可动部分、所述驱动梳齿固定部分、所述感测梳齿可动部分及所述感测梳齿固定部分为利用深硅刻蚀工艺并采用背部刻蚀衬底层的方式刻蚀而成。
38、可选地,所述器件层还包括:电气互联系统;
39、所述电气互联系统用于连接外电路并接收所述外电路传输的驱动电信号并输出。
40、可选地,所述器件层还包括:驱动电极、接地电极及感测电极;
41、所述驱动电极包括一个顺时针驱动电极和四个逆时针驱动电极;
42、所述顺时针驱动电极,分别与所述电气互联系统及所述驱动梳齿固定部分连接,用于接收所述电气互联系统传输的所述驱动电信号并传输所述驱动电信号至所述驱动梳齿固定部分,以驱动所述驱动梳齿可动部分顺时针运动;
43、所述四个逆时针驱动电极,分别与所述电气互联系统及所述驱动梳齿固定部分连接,用于接收所述电气互联系统传输的所述驱动电信号并传输所述驱动电信号至所述驱动梳齿固定部分,以驱动所述驱动梳齿可动部分逆时针运动;
44、所述多个接地电极,分别与所述电气互联系统及大地连接,用于提供多条通路,使所述驱动梳齿可动部分与所述驱动梳齿固定部分保持静电感应;
45、所述多个感测电极,分别与所述电气互联系统及所述感测梳齿固定部分连接,用于提取所述电容信号。
46、根据本发明提供的具体实施例,本发明公开了以下技术效果:
47、本发明提供的一种支撑弹簧模型的制备方法,基于二阶贝塞尔曲线确定用于模拟支撑弹簧模型的二阶贝塞尔曲线的第一控制点坐标;再基于二阶贝塞尔曲线,并根据第一控制点坐标,随机生成4n组用于模拟支撑弹簧模型的二阶贝塞尔曲线的初始控制点坐标序列;然后采用遗传算法,对4n组初始控制点坐标序列进行迭代,当达到迭代的目标次数时,生成4n组目标控制点坐标序列;进一步根据第一控制点坐标及4n组目标控制点坐标序列,确定支撑弹簧模型;最后根据支撑弹簧模型,制备一体化干涉仪装置中的支撑弹簧结构。本发明通过对红外光谱仪中干涉仪的支撑弹簧结构的支撑弹簧模型进行仿真并迭代优化,提高了一体化干涉仪装置的光程差,提高了红外光谱仪的分辨率,因而,可以进一步提高了红外光谱仪对物质结构和成分的分析精度。
48、此外,本发明还提供了一种一体化干涉仪装置,该一体化干涉仪装置包括器件层、埋氧层及衬底层。器件层包括利用支撑弹簧模型制备的支撑弹簧结构,通过支撑弹簧结构提高一体化干涉仪装置的光程差,提高了红外光谱仪的分辨率,以及对物质结构和成分的分析精度。此外,该一体化干涉仪装置采用一体化设计,反射镜与衬底层一体化设计,不需要安装,并且将反射镜设计为角锥镜,改善了所安装反射镜面不垂直导致反射光与入射光不平行的问题,而且,为了方便安置角锥镜,同时又不能影响衬底层角锥镜的光路,一体化干涉仪装置为分光镜进行了内凹设计,为了保证整体结构的强壮,器件层通过桥式结构一体化连接。进一步的,为避免器件层下的衬底层影响光路,通过刻蚀去除相应区域的衬底层结构,并采用桥式结构及利用器件层将分离开的两部分衬底层连接,从而避免了对电气互连的影响,便于电信号通过器件层传输。
49、进一步的,干涉仪采用的是旋转运动的叉骨式干涉仪,而不是传统的迈克尔逊干涉仪,其光程差是迈克尔逊干涉仪的两倍,提高了光谱的分辨率。
本文地址:https://www.jishuxx.com/zhuanli/20240929/312919.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。