基于仿生光纤纤毛阵列的低频水声信号探测方法与装置
- 国知局
- 2024-10-09 16:29:05
本发明涉及光纤传感领域和深度学习领域,具体涉及一种基于仿生光纤纤毛阵列的低频水声信号探测方法与装置,该装置以仿生纤毛矢量水听器为基元,结合神经网络算法,尤其适用于低频水声信号的探测和智能识别。
背景技术:
1、随着材料工艺和现代制造技术的发展,水下运动目标产生的噪声已降低到海洋环境噪声以下的水平,传统的水声探测技术面临诸多困难。发展适用于低频频段,具有极高灵敏度和自主信号处理能力的水声探测装置就具有着重要的意义。
2、矢量水听器可测量声场中的矢量参数,在海洋环境噪声抑制、目标辐射噪声高增益获取、目标跟踪定位等方面均具有较大优势,是目前在水声探测领域极具发展前景的一类水声探测装置。按照技术路线不同,矢量水听器一般可分为压电型、光纤型和mems型等几种,文献报道中具有代表性的结果包括:中国发明专利“三维压电陶瓷矢量水听器”(zl201210372979.6,)、“三维圆环体形矢量水听器”(zl201310067898.x)、“复合式标矢量水听器”(zl201310392752.2)、中国发明专利申请“低频声矢量水听器”(申请号201610795311.0,公开日2017-01-04)、中国实用新型专利“二维同振型矢量水听器”(zl201820683164.2)等。这些专利均提出了利用压电水听器实现同振或振速型矢量水声传感。但压电型矢量水听器灵敏度较低,抗干扰能力差,信号传输距离受限,实际应用效果不佳。中国发明专利“推挽式光纤激光矢量水听器”(zl201310035388.4)、“一种光纤激光矢量水听器”(申请号201910032857.4,公开日2019-04-19)、中国实用新型专“一种三维压差式光纤矢量水听器”(zl201721863974.8)、“一种组合式光纤矢量水听器”(zl201721878821.0)、中国发明专利申请“一种基于光纤光栅的干涉型三维矢量水听器”(申请号201310711632.4,公开日2014-03-26)等提出了基于光纤水听器实现水声矢量场测量的不同方法,分别利用光纤激光或光纤干涉仪实现水声传感,结合推挽结构、压差式结构或三分量组合式结构实现对水声场矢量信息的获取。其中,双臂干涉型光纤水听器方案最为成熟,应用也最为广泛,但结构复杂、体积臃肿、成本高昂,在频带拓展上面临巨大困难。中国发明专利“差动隔振式mems矢量水听器”(zl201410626399.4)、“基于压阻效应的mems三维同振型矢量水听器”(zl201710450802.6)、“高灵敏度宽频带压电式mems矢量水听器”(zl201810434347.5,)、中国发明专利申请“仿海豹胡须的宽频带mems矢量水听器”(申请号201510670121.1,公开日2015-12-23)等均提出了基于mems工艺实现微型水听器的方案,主要围绕如何利用纤毛式微结构结合压电或压阻效应实现更好的器件性能,但此类传感器主要采用电信号进行传感,容易受到外界干扰,稳定性较差。中国发明专利“一种momes矢量水听器”(zl201510411902.9)借鉴纤毛式仿生传感的基本结构,利用对称分布的四个f-p干涉仪测量声波引起的膜片形变,传感结构复杂,装配难度大。
3、上述专利采用各不相同的技术路径实现对水声信号的矢量探测,可一定程度提高水声探测效能,但在灵敏度提升、大规模阵列复用、水声目标自主识别等方面尚有进一步改进的空间。
技术实现思路
1、本发明旨在解决现有技术的缺陷而提出一种基于仿生光纤纤毛阵列的低频水声信号探测方法与装置,以实现结构紧凑、灵敏度极高、目标自主识别的水声目标探测,尤其适用于低频水声信号探测和智能识别领域应用。
2、本发明采用的技术方案为,一种基于仿生光纤纤毛阵列的低频水声信号探测方法,该方法分为以下步骤:
3、步骤1、光信号的调制与传输:
4、激光器作为光源发射原始光信号,使用光衰减器对光信号强度进行衰减,将其衰减至不会对探测仪器造成损伤的程度,光信号经过强度调制后从环形器的第一个端口进入并在第二个端口输出进入耦合器,耦合器将单个光路分为n个性质相同的光路。其中,n为自然数,且n≥2。然后这n个光路对应的光信号同时进入n条长度不同的延时光纤,使得每个信号之间产生相位差,之后这些光信号先后进入由n根同样长度互不相同的端面镀膜光纤构成的纤毛阵列,纤毛阵列末端放置反射镜,使得所有镀膜光纤的端面与反射镜构成f-p腔;
5、步骤2、光信号在f-p腔内的传播:
6、n个光路对应的光信号从纤毛阵列输出,经过f-p腔的调制后,得到了n个光路对应的反射光,且每个光路主要存在三种类型的反射光并相互产生干涉。其中,这三类反射光包括在镀膜的下端面直接反射回纤芯内部的反射光、透过镀膜的下端面后被上端面反射后重新透射回纤芯内部的反射光和相继透过膜的下端面和上端面并进入外界环境后被反射镜反射后重新透过镀膜进入纤芯内部的反射光。除了上述三种反射光,还存在其他类型的反射光,但这些反射光由于在往返传播的过程中存在过多的反射损耗以及透射损耗,导致其透射回纤芯内部时强度非常微弱,因此可近似忽略这些反射光的存在。之后这些光信号再次经过耦合器后得到总的干涉光信号;
7、步骤3、光信号的检测与识别:
8、总的干涉光信号返回环形器的第二个端口后从第三个端口输出,然后通过光电探测器将光信号转化为电信号并利用示波器对电信号进行采集,采集得到的数据经过解调得到光强与f-p腔的腔长之间的关系以及腔长与声压之间的关系,最后将得到的解调数据输入至训练好的神经网络模型中用于识别外界声源的类型,由于纤毛阵列中各端面镀膜光纤的长度不同,对应的f-p腔腔长不一致,进而每根纤毛的谐振频率各不相同,因此纤毛阵列面临不同频率的声波作用时响应强度随频率的分布也不相同,即可以采用声波频率作为实际标签对这些数据结果进行分类,以实现对水声目标的探测和智能识别;
9、步骤1所述n个光路对应的光信号需要通过延时光纤产生相位差,其过程如下:
10、假设输入n个光路中光信号的波长均为λ,n条延时光纤的长度为dn(n=1,2,3,...,n),每条延时光纤之间的长度不同,相邻长度的延时光纤的长度差为δd=|dn-dn-1|,与之对应的光信号之间可产生稳定的相位差δφ,其大小为:
11、
12、而经过f-p腔形成干涉光后,这些干涉光经过延时光纤后还会再产生一次相位差,因而总的相位差大小为2δφ。
13、因此,当所有干涉光信号返回耦合器输入后,由于信号之间存在相位差2δφ,这些信号在经过耦合器耦合为同一个信号之后,每个光路原有的干涉信息均能够得到保留且不会相互干扰。
14、步骤1所述反射镜与所有镀膜光纤的端面构成f-p腔,反射镜的设计过程如下:
15、反射镜是基于该装置测量的动态范围和灵敏度进行设计,涉及自由曲面设计的理论主要包括高斯曲面、双曲面以及xy多项式曲面等,优选双曲面理论设计反射镜。具体如下:
16、在三维空间中,双曲面理论对应的自由曲面方程如下所示:
17、
18、其中,a、b、c为常数。依据纤毛阵列中镀膜光纤位置的分布情况改变a、b、c的取值,能够设计出适应各镀膜光纤端面位置变化的反射镜,确保每根镀膜光纤在受到外界声波作用时,对应端面依旧能与反射镜保持平行,降低信号损失,进而实现f-p腔的最佳干涉效果。
19、步骤2所述单个光路上光信号在经过f-p腔时主要产生三种类型反射光且相互产生干涉,其过程如下:
20、忽略光信号在端面镀膜光纤传播过程中产生的信号衰减,假设这些光信号刚入射f-p腔时振幅均为a,同时端面镀膜光纤内部的纤芯、端面的镀膜、外界环境介质以及反射镜对应的折射率分别为na、nb、nc、nd,膜的厚度为h,f-p腔的腔长为l,根据菲涅尔公式,可以得到入射光在传播过程中涉及的一系列反射系数以及透射系数为:
21、
22、其中,rab是光从镀膜下端面反射回纤芯内部的反射系数,rba是光从纤芯上端面反射回镀膜内部的反射系数,rbc是光入射至镀膜与外界环境的接触面后反射回镀膜内部的反射系数,rcb是光入射至外界环境与镀膜的接触面后反射回外界环境的反射系数,rcd是光入射至外界环境与反射镜的接触面后反射回外界环境的反射系数,tab是光从纤芯内部透射到镀膜内部的透射系数,tbc是光从镀膜内部透射到外界环境的透射系数,tcb是光从外界环境重新透射到镀膜内部的透射系数,tba是光从镀膜内部重新透射到纤芯内部的透射系数。
23、首先,光信号在镀膜的下端面直接反射回纤芯内部形成第一类反射光,对应的振幅为arab,设初相位为δ,则平面波表达式为:
24、e1=arabeiδ (4)
25、第二类反射光是指入射光透过镀膜的下端面后被上端面反射后重新透射回纤芯,其中被上端面反射后可能存在多次上下端面反射的情况,因而得到的振幅为atabrbc(rbarbc)ntba(n=0,1,...,∞),n为多次镀膜上下端面来回反射的次数。与第一类反射光相比,第二类反射光存在的相位差大小为:
26、
27、因此,对应的平面波表达式为:
28、
29、进一步对(6)式进行展开并求和,可得到第二类反射光总的平面波为:
30、
31、最后第三类反射光是指入射光相继透过膜的下端面和上端面并进入外界环境后被反射镜反射后重新透过镀膜进入纤芯,其中可能存在多次被反射镜表面反射后以及透过膜的上端面被膜下端面反射后重新透射经过膜的上端面进而返回反射镜表面的情况,因此得到的振幅概括为atabtbcrcd(tcbrbatbcrcd)mtcbtba(m=0,1,...,∞),m为多次在反射镜与镀膜上端面之间来回反射的次数。同样地,与第一类反射光相比,第三类反射光存在的相位差大小为:
32、
33、而对应的平面波表达式为:
34、
35、同理,对(9)式进行展开并求和,可得到第三类反射光总的平面波为:
36、
37、综合上述推导,f-p腔主要存在以上三种类型的平面波且表达式可见(4)(7)(10)式,假设初相位δ为0,由干涉定理可知,总的干涉光强的表达式如下:
38、icon=|e1+e2+e3|2 (11)
39、总的干涉光强icon可进一步表示为:
40、
41、其中,i0表示初次入射至f-p腔的光信号强度,与振幅a的关系如下:
42、i0=a2。 (13)
43、步骤3所述将解调数据输入至训练好的神经网络模型中用于识别外界声源,根据现有的神经网络模型,常用的有bp神经网络、卷积神经网络、生成对抗网络、循环神经网络以及长短期记忆网络等,其中长短期记忆网络由hochreiter和schmidhuber于1997年首次提出(long short-term memory[j],neural computation,1997,9(8):1735-1780),该模型相比其他类型的神经网络具备可处理长序列数据、可动态记忆和遗忘、泛化能力强以及适用性广泛等优势,因此优选长短期记忆网络作为主体构建神经网络模型,模型的训练过程如下:
44、首先,将实测的已知声源的声学特征数据作为换能器的驱动信号后,将换能器放置于纤毛阵列附近,促使纤毛阵列产生振动改变各端面镀膜光纤对应的f-p腔长,然后对这些依赖已知声源产生的信号数据进行采集并解调。其中,获取的解调数据按照7:2:1的数量比例分为训练集、验证集和测试集,训练集用于训练神经网络模型,验证集用于评估训练过程中所获取的神经网络模型性能,测试集则用于评估训练完成后的神经网络模型是否能够准确预测出未知环境下得到的信号数据类别,即模型的泛化能力。随后将所有集里的每一个解调数据按照各自产生时对应的声波频率进一步分类,每一个类别算作实际标签,即作为后续训练、验证和测试神经网络模型时判断其性能的主要依据,此处共设置了i个类别(i=1,2,3,...,w),w为总类别数量,可根据实际需求进行调整。将训练集数据导入至神经网络模型的输入层后,随机初始化神经网络模型中每个神经元的权重和偏置,同时设置迭代周期为p次、学习率s以及正则化参数σ。其中,学习率是每次迭代时更新模型参数如权重和偏置的步长,正则化参数σ则是防止模型过拟合的系数,通常设置迭代周期p为800次、学习率s为0.001、正则化参数σ为0.01。根据步骤1所述存在n个传输返回的干涉光信号,输入层的神经元共设置了n个,每一个神经元对应一个光路的干涉信号。接着,训练集数据在网络中向前传播进入隐藏层,隐藏层数共设置了m层,其中m为自然数,每经过一层就需要进行加权求和以及激活函数处理。其中,常用的激活函数主要有sigmoid、relu、tanh、softmax等,而softmax相比其他类型的激活函数更擅长多个目标的分类和识别,因而优选softmax作为神经网络模型的激活函数,其表达式为:
45、
46、其中,zi为第i个类别的线性输出,w为总类别数量。
47、当训练集数据从隐藏层出来并进入输出层后,在输出层处采用交叉熵损失作为损失函数计算预测输出和实际标签之间的损失,并利用该函数的梯度信息以及反向传播算法(beyond regression:new tools for prediction and anal-ysis in the behavioralsciences[d],1974,harvard university)计算每个神经元的权重和偏置所对应梯度,根据梯度结果,使用梯度下降算法adam(adam:a method for stochastic optimization[c],international conference on learning representations,2015,usa)更新模型中的权重和偏置,交叉熵损失函数(cel)表达式如下:
48、
49、其中,w同样为总类别数量,yo,i为判断指示器,即类别i是正确的分类,yo,i取值为1,否则取值为0,po,i为模型预测信号数据属于类别i的概率。
50、之后,重复上述方法进行p次迭代,直到神经网络模型在训练集上的性能达到收敛或满足预定的迭代周期。在迭代的过程中,神经网络模型需要使用验证集评估每一次迭代后模型的性能,以此在更新模型权重和偏置的同时优化原有的模型设置如隐藏层数量m、学习率s大小或正则化参数σ大小等,进而在迭代结束后选取性能表现最优的模型作为最后使用的神经网络模型。此外,在模型完成建立后还需要测试集评估模型的预测效果,以此判断该模型的泛化能力强弱。最后,将纤毛阵列置于存在未知声源的环境中获取由该声源影响而产生的信号,对这些信号数据进行解调并代入至训练得到的神经网络模型进行预测并分类,进而实现对水声目标的探测和智能识别。
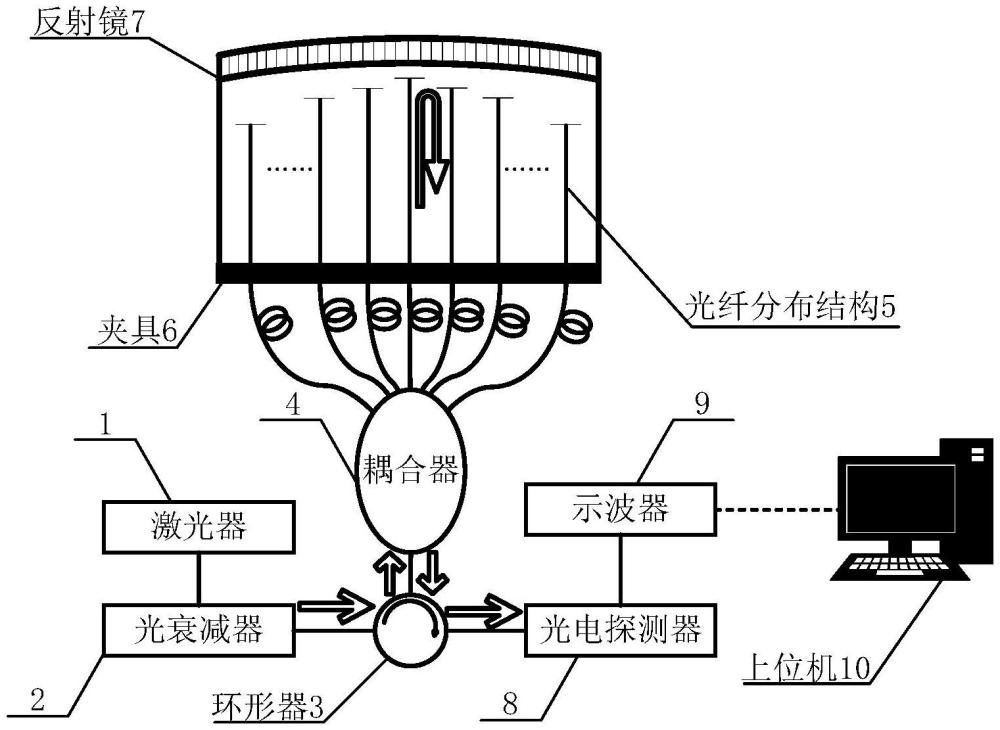
51、本发明还提出一种基于上述方法的水声信号探测装置,包括:激光器1,光衰减器2,环形器3,耦合器4,光纤分布结构5,夹具6,反射镜7,光电探测器8,示波器9以及上位机10;
52、所述光纤分布结构5包括传输光纤501、延时光纤502、纤毛阵列503和镀膜504,由夹具6固定,使光纤端面与反射镜7构成f-p腔,其中纤毛阵列503由n根端面镀膜光纤所构成,每个光路对应的延时光纤502长度各不相同。当激光从激光器1出射后,先经过光衰减器2以调整其光强大小,接着经过环形器3后入射至耦合器4分为n束光路进入光纤分布结构5,其中传输光纤501用于光信号的传播,延时光纤502用于控制n个光路的传输速率实现复用,防止各信号之间的干扰,纤毛阵列503作为传感对象会受到外界声波的作用而产生振动,镀膜504用于增强f-p腔的干涉效果,然后从f-p腔处反射的光信号再次经过耦合器4和环形器3并入射至光电探测器8使得光信号先转化为电信号并利用示波器9对电信号进行采集,之后上位机10对该信号进行解调以获取光强与f-p腔的腔长之间的关系以及腔长与声压之间的关系,最后将解调数据输入至训练好的神经网络模型中就能够识别外界声源的类型;
53、所述纤毛阵列503采用了基于谐振工作模式的非线性放大,即纤毛的端面与反射镜之间构成f-p腔时,f-p腔的腔长与谐振频率高度相关,当外界声波以某根纤毛的谐振频率作用于纤毛阵列503上时,对应的纤毛相比其他纤毛能够实现更为明显的振动,进而导致其f-p腔腔长发生显著变化,利用该性质能够有效获取声波频率,进而实现极高的灵敏度;
54、所述纤毛阵列503采用了基于纤毛谐振模式控制的窄带滤波,即纤毛阵列503中不同长度的f-p腔对应的谐振频率不一致,从而每根纤毛只能受到对应谐振频率的作用产生显著变化,实现了声波频谱特征的识别;
55、所述纤毛阵列503和反射镜7相结合形成了基于端面镀膜光纤的f-p腔结构,该结构设计简易,便于复用技术的应用,例如时分复用或波分复用等;
56、所述纤毛阵列503和反射镜7相结合构成的f-p腔的数目和长度可根据需求自行调整,实现了多频率声波的谐振吸收和提取;
57、所述反射镜7可根据自由曲面理论对其镜面造型进行设计,使得镀膜光纤在受到外界声波作用时,其端面与反射镜7之间构成的f-p腔始终能维持腔面平行的状态,降低信号损失,进而实现f-p腔的最佳干涉效果;
58、所述上位机10采用了神经网络算法对信号进行实时声目标识别,提高了信号识别的准确率。
59、本发明创新性结合光纤f-p腔结构和传感阵列的优势,提出基于光纤纤毛阵列的低频水声信号高灵敏度探测与智能识别装置,充分发挥光学f-p腔结构简单、灵敏度高、复用容易等优势,结合纤毛阵列所具备的极高灵敏度和窄带滤波优势,控制阵列内部每根纤毛的长度,使每根纤毛的端面与反射镜构成的f-p腔的腔长各不相同,对应的谐振频率也不一致,从而使得纤毛阵列能够对不同频率的声波进行检测,无需进行复杂的傅里叶变换和滤波操作就能够直接得到来波的频率组成,实现对目标信号的智能自主识别。该装置相比于传统水听器系统更加灵敏、紧凑、高效,同时具有窄带滤波、实时频谱提取、目标自主识别等优势,具有广泛的应用前景。
60、本发明提供的一种基于仿生光纤纤毛阵列的低频水声信号探测与智能识别装置,与现有技术相比,具有以下有益技术效果:首先,创新性地引入纤毛结构,即多根端面镀膜光纤作为纤毛并构成阵列与反射镜结合形成极简f-p腔,可实现微弱扰动信号的高灵敏度检测和紧凑结构下的大规模阵列复用;其次,用于探测入射声波的单根纤毛受到谐振频率声波的作用时,对该信号具有非线性放大效应,因而与其他纤毛相比该纤毛振动幅度更为明显,可实现极高灵敏度探测;再者,通过控制光纤纤毛长度,控制f-p腔的腔长,可实现对光纤纤毛谐振频率的优化设计和阵列组合,进而能够实时提取入射声波信号的频谱特性,为目标自主智能识别提供基础;最后,每根仿生纤毛可模拟一个神经元细胞,输出信号作为神经网络的输入,实现对水声目标的自主智能识别,可最大程度实现对生物传感和决策机制的模拟。
本文地址:https://www.jishuxx.com/zhuanli/20240929/313143.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表