一种基于代理模型的飞行器空腔脉动流场快速预测方法与流程
- 国知局
- 2024-10-09 16:28:46
本发明属于飞行器领域,主要涉及飞行器空腔脉动流场快速预测方法。
背景技术:
1、内埋分离体是飞行器多体分离的一种,广泛应用于先进战机、无人机等飞行器系统上。相比传统的外挂式武器挂载方式,内埋式挂载方式能够有效降低雷达反射面积,有助于改善飞行器的结构布局与气动外形。由于放置分离体的空腔几何外形不连续,其前缘形成的剪切层内复杂的流态会产生非定常的气动载荷,造成分离体的分离运动参数在时间上具有不可重复性,影响分离效果甚至威胁到分离的安全性。
2、现有对内埋分离空腔内流场的预测方法主要有经验公式法和数值仿真方法。经验公式法能够快速的对分离体分离在时间上不可重复的程度进行预测,但应用受空速与空腔几何参数的限制,且精度较不稳定。数值仿真法能够较为准确地预测单个工况下空腔内流场的变化和分离体的运动轨迹,但对计算成本与资源提出较高要求,相应效率难以满足线上应用。
技术实现思路
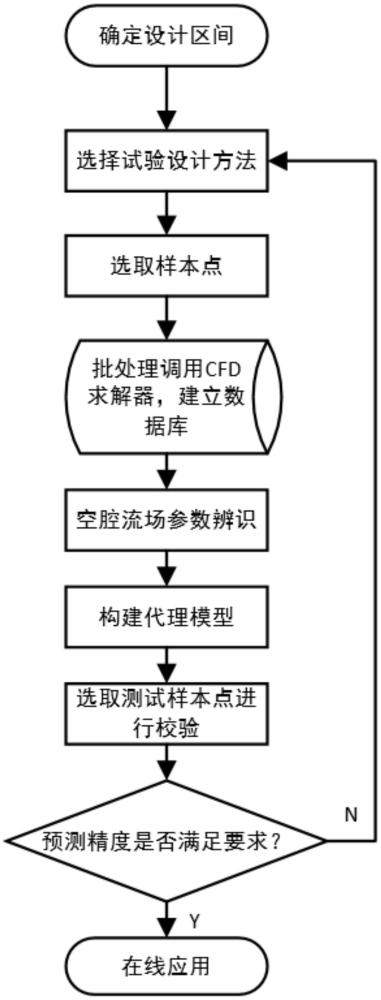
1、为了克服现有技术的不足,针对分离体分离问题中空腔内复杂流动难以快速、准确预测的问题,建立数据驱动的代理模型,实现了对复杂工况下内埋空腔区域内流动参数的强泛化、高精度、快响应预测,本发明提供一种基于代理模型的飞行器空腔脉动流场快速预测方法,包括如下步骤:
2、步骤1:生成样本点;
3、步骤2:建立数据集;
4、步骤3:空腔流场参数辨识;
5、步骤4:构建代理模型;
6、步骤5:精度校验;
7、步骤6:在线应用。
8、更进一步的,所述步骤1中,生成样本点的步骤为:
9、飞行器在释放或弹射分离体时的样本点包括飞行速度v、飞行高度h、飞行攻角α、飞行器上空腔的长度l和飞行器上空腔的深度d,在样本点中,飞行速度v的取值范围、飞行高度h的取值范围、飞行攻角α的取值范围、飞行器上空腔的长度l的取值范围和飞行器上空腔的深度d的取值范围构成样本点选取空间;
10、采用抽样采样方法在样本点选取空间内选取m个样本点n1=(v1,h1,α1,l1,d1)、n2=(v2,h2,α2,l2,d2)…nm=(vm,hm,αm,lm,dm),其中
11、v1、v2…vm∈[vmin,vmax]
12、h1、h2…hm∈[hmin,hmax]
13、α1、α2…αm∈[αmin,αmax]
14、l1、l2…lm∈[lmin,lmax]
15、d1、d2…dm∈[dmin,dmax]
16、其中,vmin为飞行速度的最小值,vmax为飞行速度的最大值;
17、hmin为飞行高度的最小值,hmax为飞行高度的最大值;
18、αmin为飞行攻角的最小值,αmax为飞行攻角的最大值;
19、lmin飞行器上空腔长度的最小值,lmax飞行器上空腔长度的最大值;
20、dmin飞行器上空腔深度的最小值,dmax飞行器上空腔深度的最大值。
21、更进一步的,所述抽样采样方法为拉丁超方法。
22、更进一步的,所述步骤2中,建立数据集的步骤为:
23、所述步骤1中选取的m个样本点中,对选取的每个样本点使用cfd方法建立高精度分离体空腔流动模型,通过空腔流动模型计算空腔流场数据,空腔流场数据为分离体从分离开始到完全离开运载体空腔流场范围整个过程中的速度vf、压力pf、密度ρf、涡量ωf分布、分离体随时间的速度vs、动量矩hs和位移rs,将所得到的过程中空腔流场的速度vf、压力pf、密度ρf、涡量ωf分布、分离体随时间的速度vs、动量矩hs、位移rs参数加入到数据集中。
24、更进一步的,所述步骤3中空腔流场参数辨识的步骤为:
25、所述步骤1中选取的m个样本点中,对每个样本点使用cfd方法计算,利用q准则对空腔流场中的涡核心区进行识别,提取出空腔前缘分离涡的空腔分离涡参数,空腔分离涡参数包括涡核心坐标re、涡区截面积se和涡强度ie;计算空腔内气动力fc、分离体上的气动力fs、空腔内气动力矩mc、分离体上气动力矩ms、空腔内载荷脉动频率fc和分离体上载荷脉动频率fs;将涡核心坐标re、涡区截面积se、涡强度ie、fc、fs、mc、ms、fc和fs加入到数据集中。
26、更进一步的,所述步骤4中构建代理模型的步骤为:
27、利用步骤2中的空腔流场数据和步骤3的空腔分离涡参数,以飞行器参数和分离时间t为输入,以空腔分离涡参数、空腔内所受的气动力fc、空腔内气动力矩mc、空腔内载荷脉动频率fc、分离体上所受的气动力fs、分离体上气动力矩ms、分离体上载荷脉动频率fs、分离体的运动速度vs、分离体的动量矩hs和分离体的位移rs为输出,构建神经网络代理模型;其中,飞行器参数包括飞行高度v、飞行速度h、姿态角α、空腔长度l、空腔深度d;空腔分离涡参数包括涡核心坐标re、涡区截面积se和涡强度ie;
28、神经网络代理模型使用步骤2中的空腔流场数据和步骤3的空腔分离涡参数数据作为训练数据,构建数据损失函数l1:
29、
30、其中y(i)为神经网络代理模型当前步的输出值,为神经网络代理模型的真实值,k为输出参数个数;
31、分离体上的气动载荷与分离轨迹必须满足飞行动力学方程:
32、
33、其中,m为分离体的质量;
34、分离体的位移和载荷之间建立飞行动力学方程损失函数为:
35、
36、其中,v1、v2、v3分别为vs在x轴、y轴、z轴上的分量,f1、f2、f3分别为fs在x轴、y轴、z轴上的分量,h1、h2、h3分别为hs在x轴、y轴、z轴上的分量,m1、m2、m3分别是ms在x轴、y轴、z轴上的分量;j为求和系数;x轴、y轴、z轴坐标系是以飞行器质心为原点,x轴为飞行器的弦向方向,y轴为飞行器的展向方向,z轴根据右手定则确定;l2用于刻画神经网络模型对微分方程的符合程度;
37、以l1、l2最小化为目标,采用遗传算法作为优化器更新神经网络模型权重;神经网络模型构建完成之后根据飞行参数对空腔分离流场参数进行实时预测;神经网络模型在训练完成之后,根据输入的飞行高度v、飞行速度h、姿态角α、空腔长度l、空腔深度d预测空腔分离涡参数、空腔内和分离体上的气动力、气动力矩、载荷脉动频率、分离体的运动速度、动量矩和位移。
38、更进一步的,所述步骤5中精度校验的步骤为:
39、在样本点选取空间内重新随机获取p个测试样本点,使用cfd方法获得测试样本点处的参数集合参数集合包括空腔分离涡参数、空腔内气动力fc,cfd、分离体上的气动力fs,cfd、空腔内气动力矩mc,cfd、分离体上气动力矩ms,cfd、空腔内载荷脉动频率fc,cfd、分离体上载荷脉动频率fs,cfd、分离体的运动速度vs,cfd、分离体的动量矩hs,cfd和分离体的位移rs,cfd;空腔分离涡参数包括涡核心坐标re,cfd、涡区截面积se,cfd和涡强度ie,cfd;
40、将p个测试样本点的参数集合作为输入,使用神经网络模型预测测试样本点处的参数集合参数集合包括空腔分离涡参数、空腔内气动力fc,nn、分离体上的气动力fs,nn、空腔内气动力矩mc,nn、分离体上气动力矩ms,nn、空腔内载荷脉动频率fc,nn、分离体上载荷脉动频率fs,nn、分离体的运动速度vs,nn、分离体的动量矩hs,nn和分离体的位移rs,nn;空腔分离涡参数包括涡核心坐标re,nn、涡区截面积se,nn和涡强度ie,nn,将使用cfd计算得到参数集合中数据与神经网络代理模型预测的输出得到的参数集合进行比较,得到神经网络模型的预测误差μ:
41、
42、其中,ycfd为中的元素,ynn为中的元素,ycfd和ynn为集合中同种类型的元素;
43、如果和中相同类型的元素,预测误差大于15%,则返回步骤1,增加样本点数量重新构建神经网络模型,或更换抽样采样的方法重新构建神经网络模型;如果预测误差不大于15%,则精度满足,进入步骤6。
44、更进一步的,所述步骤6在线应用的步骤为:
45、将经过精度校验的神经网络模型部署在运载平台上,飞行过程中能够实时地根据飞行高度、速度、姿态给出预测结果,分析分离安全性;根据实时气动载荷为输入指导分离驱动器控制,提升分离相容性。
46、本发明的有益效果是:本发明实现了对飞行器-内埋物空腔内脉动流场的快速实时预测,对比传统方法泛用性更高,预测更准确。针对作战飞机等大体量差的多体飞行器,本发明的预测数据能够指导分离驱动器的控制,实现相容分离。在无人机等小体量差的多体飞行器的分离过程对运载平台的飞行状态有较大影响,本发明的预测数据除了指导分离体的安全分离外,还能指导对运载平台的控制,消除分离扰动,稳定飞行状态。
本文地址:https://www.jishuxx.com/zhuanli/20240929/313128.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表