一种基于旋翼无人机的地磁传感器误差校正方法
- 国知局
- 2024-10-09 14:42:29
(一)本发明属于传感器,具体涉及一种基于旋翼无人机的地磁传感器误差校正方法。
背景技术:
0、(二)背景技术
1、近年来,旋翼无人机(rotorcraft unmanned aerial vehicle,简称ruav)已被广泛应用于空中摄影摄像、巡检和物流等领域,以解决传统作业方式存在的安全风险和效率低下等问题。陀螺仪、加速度计和地磁传感器是ruav常见的传感器配置,其中地磁传感器用于测量地球磁场的方向和强度,是高精度航姿测量系统(attitude and headingreference system,简称ahrs)的基础。然而,地磁传感器自身误差、ruav本体硬磁干扰以及环境软磁干扰是影响ahrs精度的主要误差源。工业界可以使用双天线rtk(real-timekinematic,载波相位差分)定向技术代替地磁传感器,以规避该问题,但对于成本敏感、体积有限的消费级无人机而言,使用受限。为了提高ahrs精度,诸多学者对包括采样算法和拟合算法在内的地磁传感器误差校正技术展开了研究。
2、传统采样算法使用旋转平台、磁场生成器等专业设备或者手动翻滚如十二位置翻滚法等方法采集不同姿态下的地磁数据。然而,专业设备成本高,无法在任意场景使用,并且存在数据密集和不均匀问题,增加了低算力平台负担。基于优化算法、机器学习和深度学习的拟合算法,存在复杂度高、收敛速度慢、模型泛化性不足、计算资源消耗较大等问题,对于成本敏感、计算资源有限的消费级旋翼无人机来说,这些方法在工程上并不实用。点积不变法、椭球拟合法、双内积法等传统拟合算法,考虑到消费级旋翼无人机使用低成本、低精度加速度计,且易受运动加速度干扰,理论上会对双内积法、点积不变法带来不利影响。需要注意的是,软磁干扰误差需要独立于地磁校正模型,借助外部传感器进行检测和补偿。
3、综上分析,介绍了一种基于旋翼无人机的地磁传感器误差校正方法,并提出了一种ahrs辅助地磁数据采样方法以及gps辅助软磁干扰误差检测方法。针对地磁传感器自身误差和ruav本体硬磁干扰,建立采样和拟合校正模型,采样过程为转且仅转ruav水平和竖直方向各一圈,拟合结果为椭球9个参数。使用ahrs旋转四元数给采样圆上的样本点编号,不仅提高了空间采样点的分布均匀性,也减少了数据计算量,而且有利于获得更好的校正结果。针对环境软磁干扰,利用gps速度辅助检测技术,自动调节地磁航向修正权重,大大提升了ahrs精度和抗干扰能力。
技术实现思路
0、(三)技术实现要素:
1、本发明提出了一种基于旋翼无人机的地磁传感器误差校正方法,旨在解决针对地磁传感器自身误差、硬磁干扰和环境软磁干扰造成的地磁传感器误差,对其进行误差修正,为旋翼无人机校正提供精准的校正技术并确保ahrs以及定位系统稳定工作。
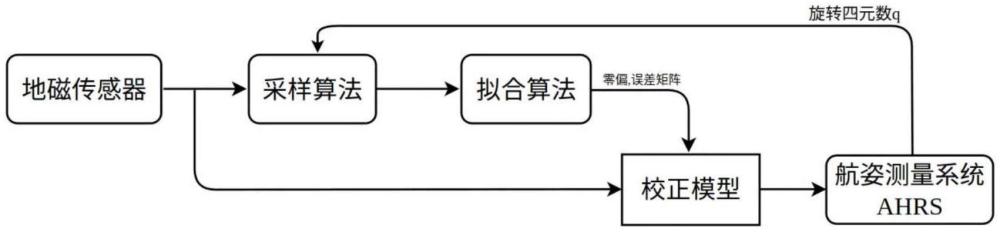
2、为实现上述目的,本发明提供了一种基于旋翼无人机的地磁传感器误差校正方法,地磁传感器误差校正系统设计如图1所示,所述方法包括以下步骤:
3、使用设计的采样算法进行地磁传感器数据采集,所述采样算法包括水平采样、中间采样和竖直采样;
4、其中,水平采样为以垂直于飞机机身面为旋转轴,在水平面内转且仅转飞机一圈,转动过程中,允许飞机机身面于水平面存在δσ1角度误差;
5、中间采样为完成水平采样后,从飞机任意方向翻转到竖直方向,采样过程中,从飞机机身面远离水平面δσ1角度开始采样,到飞机机身面开始接近竖直方向δσ角度结束采样;
6、根据地球磁场分布,地理纬度越高,当地的磁倾角越大,即水平磁场分量越小,竖直磁场分量越大。则高纬地区进行水平采样,采样圆半径过小,使用椭球拟合出来的参数不准确,导致校正失败。然而引入中间采样过程很好地弥补该缺陷;
7、竖直采样为以竖直方向为旋转轴,在竖直方向上转且转飞机一圈,转动过程中,允许飞机机身面与竖直线存在δσ2角度误差。
8、设计使用一种ahrs辅助地磁数据采样方法,即在对地磁数据采样完成后,使用ahrs的旋转四元数方法对采样圆上的样本进行点编号;不仅提高了空间采样点的分布均匀性,也减少了数据计算量,而且有利于获得更好的校正结果。
9、针对地磁传感器自身误差和ruav本体硬磁干扰,设计建立拟合校正模型,对采集标点后的数据进行椭球拟合校正,拟合结果为椭球9个参数。
10、针对处于软磁干扰环境下的地磁传感器,当受到环境软磁干扰时,使用gps辅助检测技术降低地磁测量校正权重。
11、本发明的有益效果为:
12、本发明设计了一种基于旋翼无人机的地磁传感器误差校正方法,所述方法所构建的一种ahrs辅助地磁数据采样方法以及gps辅助软磁干扰误差检测方法。针对地磁传感器自身误差和ruav本体硬磁干扰,建立采样和拟合校正模型,采样过程为转且仅转ruav水平和竖直方向各一圈,拟合结果为椭球9个参数。本发明算法带来了三维空间数据的分布均匀性,校正后的地磁场矢量强度标准差优于0.01高斯,同时表现出了较强的抗软磁干扰能力,工程实用性较高,满足旋翼无人机的悬停等作业要求,具有广泛的推广应用价值。
技术特征:1.一种基于旋翼无人机的地磁传感器误差校正方法,其特征在于,所述方法包括以下步骤:
2.根据权利要求1所述的一种基于旋翼无人机的地磁传感器误差校正方法,其特征对于,步骤(1)具体包括如下步骤:
3.根据权利要求1所述的一种基于旋翼无人机的地磁传感器误差校正方法,其特征对于,步骤(2)具体包括如下步骤:
4.根据权利要求1所述的一种基于旋翼无人机的地磁传感器误差校正方法,其特征对于,步骤(3)中的拟合过程具体过程如下:
5.根据权利要求1所述的一种基于旋翼无人机的地磁传感器误差校正方法,其特征对于,步骤(4)中的gps辅助检测技术具体为:
技术总结本发明公开了一种基于旋翼无人机的地磁传感器误差校正方法。本发明首先对地磁数据进行采样,其中采样算法分为水平采样、中间采样和竖直采样,且采样过程为转且仅转旋翼无人机(Rotorcraft Unmanned Aerial Vehicle,简称RUAV)水平和竖直方向各一圈。然后使用高精度航姿测量系统(Attitude and Heading Reference System,简称AHRS)旋转四元数给圆上的样本点编号,这样不仅提高了空间采样点的分布均匀性,也减少了数据计算量,有利于获得更好的校正结果。其次针对地磁传感器自身的误差和RUAV本体的硬磁干扰,建立拟合校正模型。最后针对环境软磁干扰,利用GPS辅助检测技术,自动调节地磁航向修正权重,校正后的地磁场矢量强度标准差优于0.01高斯,同时表现出了较强的抗软磁干扰能力。技术研发人员:陈卓,王勇军,徐伟,郭岩,盘书宝受保护的技术使用者:桂林电子科技大学技术研发日:技术公布日:2024/9/29本文地址:https://www.jishuxx.com/zhuanli/20241009/306193.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表