一种减小风力涡轮机在塔架经过期间的叶片偏转的方法与流程
- 国知局
- 2024-10-09 15:05:42
本发明涉及一种控制风力涡轮机以减小塔架经过期间的叶片偏转的方法。
背景技术:
1、当运行水平轴风力涡轮机时,转子每旋转一圈,每个风力涡轮机叶片就会经过风力涡轮机塔架一次。如果风力涡轮机是逆风向风力涡轮机,即转子朝向来风的风力涡轮机,风作用在风力涡轮机叶片上的力会将风力涡轮机叶片推向塔架。这可能导致风力涡轮机叶片在塔架经过期间与塔架发生碰撞的风险。
2、例如,风力涡轮机叶片与塔架发生碰撞的风险取决于风力涡轮机叶片响应于作用在风力涡轮机叶片上的风而偏转的程度。因此,风力涡轮机叶片越柔性,它们偏转到导致风力涡轮机叶片与塔架发生碰撞的风险的程度越高。
3、以前,人们已经采取了各种措施,以确保塔架经过期间风力涡轮机叶片与塔架之间的安全距离,有时也称为塔架间隙。
4、例如,风力涡轮机叶片可以设计成具有足够高的刚度,以确保它们不会偏转到可能导致与塔架碰撞的程度。然而,这样做的缺点是,可能需要增加风力涡轮机叶片的重量,并且叶片在实际需要偏转以避免风力涡轮机叶片上负载的情况下无法偏转,这可能导致风力涡轮机叶片断裂。
5、作为替代方案,转子可以设计成在塔架经过期间将叶片末端定位在离塔架一定距离的位置,该距离足够大以防止风力涡轮机叶片与塔架发生碰撞,即使风力涡轮机叶片偏转也是如此。这可以包括例如引入较大的锥角、引入较大的转子或轮毂悬垂,或引入较大的转子倾斜角。然而,这种转子设计的缺点是它们会在风力涡轮机上引起更高的负载,特别是在主轴和传动系统上。
6、作为另一种替代方案,可以周期性地调整风力涡轮机叶片的桨距角,方式是风力涡轮机叶片在塔架经过期间会稍微变桨到风之外。这样,风力涡轮机叶片在经过塔架时偏转会减小,但风力涡轮机叶片从风中提取能量的能力在转子平面的大部分区域内维持不变。然而,持续周期性调整桨距角会导致变桨轴承严重磨损。
7、us2013/0045098 a1公开了一种用于风力涡轮机的周期性桨距控制系统。可以使用一种用于逐步或正向调整各个转子叶片的桨距角的开环控制算法来增加涡轮机塔架底座与接近的叶片末端之间的间距。当每个叶片接近塔架底座时,可以对其进行顺桨以减小其功率负载,并促进增加超出由所谓的塔架阴影效应产生的正常卸载或顺桨的间隙。
技术实现思路
1、本发明实施例的目的在于提供一种控制风力涡轮机以减小塔架经过期间的叶片偏转的方法,其中变桨轴承上的磨损减少,而不会引入风力涡轮机叶片和塔架之间发生碰撞的风险。
2、根据第一方面,本发明提供了一种控制风力涡轮机以减小塔架经过期间的叶片偏转的方法,通过在调整区域内的方位角处添加桨距偏移量来减小叶片偏转,风力涡轮机包括塔架、可旋转地安装在塔架上的机舱,以及通过轮毂可旋转地安装在机舱上的一个或多个可调桨距的风力涡轮机叶片,由此风力涡轮机叶片与轮毂一起相对于机舱进行方位角旋转,该方法包括以下步骤:
3、-至少在与风力涡轮机叶片的塔架经过位置(风力涡轮机叶片经过塔架时)相对应的方位角处测量风力涡轮机叶片的叶片挥舞力矩(flap moment),
4、-基于测量的叶片挥舞力矩,估计在未添加桨距偏移量的情况下的风力涡轮机叶片的叶片挥舞力矩,
5、-基于测量的叶片挥舞力矩,估计在未添加桨距偏移量的情况下的转子倾斜力矩,
6、-将估计的叶片挥舞力矩与第一激活阈值进行比较,并将估计的转子倾斜力矩与第二激活阈值进行比较,
7、-在估计的叶片挥舞力矩超过第一激活阈值并且估计的转子倾斜力矩超过第二激活阈值的情况下,通过在调整区域内的方位角处添加桨距偏移量来启动风力涡轮机叶片的单独桨距角调整,调整区域包括与风力涡轮机叶片的塔架经过位置相对应的方位角。
8、因此,根据本发明的第一方面的方法是一种控制风力涡轮机以减小塔架经过期间的叶片偏转的方法。这是通过在调整区域内的方位角处添加桨距偏移量(即应用于所有风力涡轮机叶片的公共桨距角的偏移量)来实现的。
9、风力涡轮机包括塔架、可旋转地安装在塔架上的机舱以及通过轮毂可旋转地安装在机舱上的一个或多个可调桨距的风力涡轮机叶片。因此,当风作用于风力涡轮机叶片时,它们会导致轮毂相对于机舱绕主轴旋转。风力涡轮机叶片随轮毂一起旋转,这种旋转被称为“方位角旋转”。轮毂和风力涡轮机叶片有时被称为转子。因此,每个风力涡轮机叶片在转子每转一圈时都会进行360°方位角旋转。
10、在根据本发明的方法中,至少在与风力涡轮机叶片的塔架经过位置相对应的方位角处测量风力涡轮机叶片的叶片挥舞力矩。在本上下文中,术语“叶片挥舞力矩”应解释为是指风力涡轮机叶片上沿挥舞方向(即沿基本垂直于风力涡轮机叶片的弦长的方向,即基本沿风力涡轮机叶片的厚度)的力矩。挥舞方向通常主要垂直于由风力涡轮机叶片定义的转子平面。因此,经过塔架的风力涡轮机叶片的叶片挥舞力矩与风力涡轮机叶片在朝向塔架的方向上的偏转有关,从而与估计风力涡轮机叶片与塔架之间发生碰撞的风险有关。
11、测量的叶片挥舞力矩是风力涡轮机叶片中实际发生的叶片挥舞力矩,即,它表示当前运行条件下的实际叶片挥舞力矩,包括所讨论的风力涡轮机叶片的实际桨距角。
12、可以在所有方位角处,即在转子的整个转动过程中测量叶片挥舞力矩。作为替代方案,可以仅在与塔架经过位置相关的方位角处测量叶片挥舞力矩,例如在转子平面的下半部分中,在风力涡轮机叶片经过塔架的方位角位置周围120°的区域中,或在转子平面的任何其他合适部分中测量叶片挥舞力矩,只要它包括实际的塔架经过位置即可。
13、风力涡轮机叶片的叶片挥舞力矩可能会随方位角的变化而发生显著变化,例如由于风切变,即沿竖直方向的风速变化。由于是风力涡轮机叶片在转子平面下部的叶片挥舞力矩与评估塔架碰撞风险有关,因此仅测量某些方位角(包括实际塔架经过位置)处的叶片挥舞力矩就足够了。
14、叶片挥舞力矩可以例如通过使用合适的应变传感器,诸如一个或多个应变计或者一个或多个光纤测量风力涡轮机叶片处的应变来测量。
15、接下来,基于测量的叶片挥舞力矩来估计未添加桨距偏移量的情况下风力涡轮机叶片的叶片挥舞力矩。
16、尽管测量的叶片挥舞力矩反映了风力涡轮机叶片在实际运行条件下经历的实际叶片挥舞力矩,包括每个风力涡轮机叶片的实际桨距角,但估计的叶片挥舞力矩反映了风力涡轮机叶片在未添加桨距偏移量的情况下在调整区域内的方位角处将经历的叶片挥舞力矩。因此,估计的叶片挥舞力矩不一定与测量的叶片挥舞力矩相同,而是指示如果不采取任何措施(就周期性或单独桨距控制而言)来减小叶片偏转并从而增加塔架间隙,风力涡轮机叶片将如何动作。然而,由于估计的叶片挥舞力矩是基于测量的叶片挥舞力矩估计的,因此在估计叶片挥舞力矩时考虑了实际发生的环境条件,诸如风速、风向、风切变等,以及风力涡轮机叶片的公共桨距角。
17、此外,基于测量的叶片挥舞力矩,估计在未添加桨距偏移量的情况下的转子倾斜力矩。
18、在本上下文中,术语“转子倾斜力矩”应解释为是指转子上倾向于使转子向后或向前弯曲的力矩。在本上下文中,术语“向后”应解释为是指导致风力涡轮机叶片的末端在转子平面的下部远离塔架移动的方向,而风力涡轮机叶片的末端在转子平面的上部在朝向机舱的方向上移动。类似地,在本上下文中,术语“向前”应解释为是指导致风力涡轮机叶片的末端在转子平面的下部朝向塔架移动的方向,而风力涡轮机叶片的末端在转子平面的上部在远离机舱的方向上移动。向后方向上的转子倾斜力矩可以称为负转子倾斜力矩,而向前方向上的转子倾斜力矩可以称为正转子倾斜力矩。
19、因此,转子倾斜力矩也与塔架和经过塔架的风力涡轮机叶片之间的距离相关,从而与估计风力涡轮机叶片和塔架之间发生碰撞的风险相关。
20、与上文关于估计的叶片挥舞力矩所描述的情况类似,估计的转子倾斜力矩不一定是实际发生的转子倾斜力矩,而是对转子倾斜力矩的估计,如果没有采取任何措施(就周期性或单独桨距控制而言)来减小叶片偏转,即如果对风力涡轮机叶片施加相同的桨距角,转子将经历该转子倾斜力矩。
21、估计叶片挥舞力矩的步骤和估计转子倾斜力矩的步骤可以同时执行,或者这些步骤中的一个可以在另一个之前执行。
22、接下来,将估计的叶片挥舞力矩与第一激活阈值进行比较,并将估计的转子倾斜力矩与第二激活阈值进行比较。
23、在估计的叶片挥舞力矩超过第一激活阈值并且估计的转子倾斜力矩超过第二激活阈值的情况下,启动风力涡轮机叶片的单独桨距角调整。这是通过在风力涡轮机叶片处于调整区域内的方位角位置时将桨距偏移量添加到风力涡轮机叶片的桨距角来实现的,调整区域包括与风力涡轮机叶片的塔架经过位置相对应的方位角位置。
24、因此,风力涡轮机叶片的桨距角受到控制,其方式是,使得在塔架经过期间,风力涡轮机叶片略微变桨到风之外(偏离风向),从而减小叶片偏转并增加塔架间隙。然而,在风力涡轮机叶片与塔架之间不存在碰撞风险的方位角处,桨距角保持在提供最佳电力生产的角度。从而在确保足够的塔架间隙的同时,使风力涡轮机的电力生产最大化。
25、上述单独桨距角调整仅在满足估计的叶片挥舞力矩超过第一激活阈值以及估计的转子倾斜力矩超过第二激活阈值的情况下启动。因此,仅在估计的叶片挥舞力矩以及估计的转子倾斜力矩处于风力涡轮机叶片与塔架之间有碰撞风险的区域内的情况下启动单独桨距角调整。换句话说,只要估计的叶片挥舞力矩和/或估计的转子倾斜力矩处于可以假设获得足够塔架间隙的区域内,即使没有在单独或周期变桨方面采取进一步的措施,也不会激活单独桨距角调整。因此,由单独桨距调整引起的变桨轴承上的磨损被最小化,因为只有当被认为绝对有必要避免风力涡轮机叶片与塔架之间发生碰撞时,才会激活单独桨距调整。
26、调整区域可以关于指向正下方的方位角位置不对称。
27、根据该实施例,单独桨距角调整发生在相对于指向正下方的方位角不对称分布,从而相对于风力涡轮机叶片经过塔架的方位角位置不对称分布的方位角处。调整区域可以优选地相对于指向正下方的方位角不对称,其方式是使得,相比于指向正下方的方位角位置之后的方位角位置,调整区域的较大部分布置在指向正下方的方位角位置之前的方位角位置处。
28、当通过调整风力涡轮机叶片的桨距角来调整叶片偏转时,从调整桨距角到在风力涡轮机叶片上产生的空气动力学影响的变化导致叶片偏转的变化之间存在延迟。因此,为了在风力涡轮机叶片经过塔架的方位角位置处获得最大的叶片偏转变化,调整区域可以有利地相对于指向正下方的方位角位置不对称,以此方式,桨距调整可以尽早启动,并在经过塔架后不久便逐渐停止。
29、例如,调整区域可以包括相对于指向正上方的方位角位置从30°到190°的方位角位置,诸如相对于指向正上方的方位角位置从40°到190°的位置。
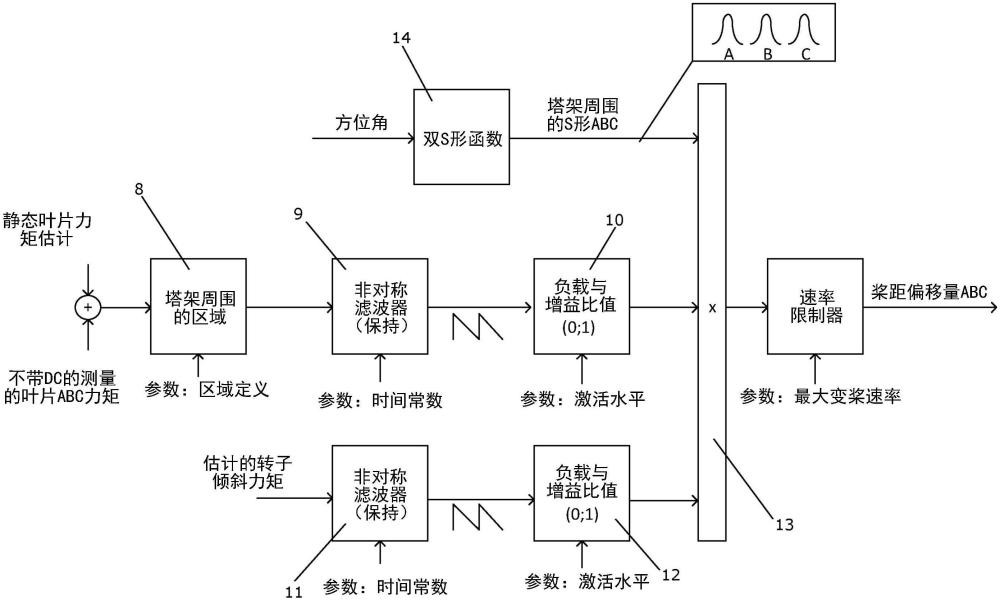
30、在未添加桨距偏移量的情况下估计风力涡轮机叶片的叶片挥舞力矩的步骤可以包括对静态叶片挥舞力矩进行建模。
31、在本上下文中,术语“静态叶片挥舞力矩”应解释为是指当风力涡轮机叶片以集体或公共的桨距角布置时,即没有周期性或单独桨距调整时,所有风力涡轮机叶片都会经历的与风力涡轮机叶片的方位角位置无关的叶片挥舞力矩。这可以使用风力涡轮机叶片的适当数学模型并基于影响风力涡轮机叶片的各种参数(例如包括转子的旋转速度、风力涡轮机叶片的公共桨距角、测量或估计的风速、电力生产等)进行建模。
32、静态叶片挥舞力矩建模的一种方法是应用叶片元素动量(bem)模型。bem模型结合了叶片元素理论和动量理论来计算风力涡轮机叶片上的局部力。bem模型适用于估计静态(dc)挥舞力矩。这种模型可能是“缓慢”的,因为其只对低频进行建模,因此无法捕捉负载的“快速”变化,例如由于阵风引起的变化。但是,可以通过将高通滤波(即仅高频)版本的测量挥舞力矩添加到通过bem模型获得的dc值中,将这种快速变化包括在估计的叶片挥舞力矩中。
33、因此,根据该实施例,估计的叶片挥舞力矩可以基于建模的静态叶片挥舞力矩和测量的叶片挥舞力矩的组合来估计,并且测量的叶片挥舞力矩可以提供取决于风力涡轮机叶片的方位角位置的贡献。
34、启动风力涡轮机叶片的单独桨距角调整的步骤可以包括:根据预定义的桨距调整曲线,在调整区域内增加风力涡轮机叶片的桨距角。
35、根据该实施例,桨距偏移量的形式是桨距角的增加,即风力涡轮机叶片略微变桨到风之外。此外,桨距角的增加跟随预定义的曲线,该曲线确保了从公共或集体桨距角到调整后的桨距角(即包括桨距偏移量的桨距角)的过渡以期望的方式进行,例如足够平滑以避免不希望的负载。
36、预定义的桨距调整曲线例如可以是s形曲线,即基本上呈“s”形的曲线。这样的曲线确保了平滑过渡。
37、替代地,预定义的调整曲线可以是任何其他合适类型的曲线,诸如正弦曲线、平方曲线、三角曲线等。
38、此外,为了确保应用桨距偏移量时的平滑过渡,可以对输出桨距偏移量信号应用速率限制器,从而限制桨距角的变化率。
39、该方法还可以包括以下步骤:持续测量叶片挥舞力矩、估计叶片挥舞力矩和转子倾斜力矩,以及将估计的叶片挥舞力矩和估计的转子倾斜力矩分别与第一激活阈值和第二激活阈值进行比较,并且该方法还可以包括以下步骤:在估计的叶片挥舞力矩减小到低于第一激活阈值和/或估计的转子倾斜力矩减小到低于第二激活阈值的情况下,中断风力涡轮机叶片的单独桨距角调整。
40、根据该实施例,在已激活单独桨距调整的情况下,以上述方式对叶片挥舞力矩进行持续测量。此外,基于测量的叶片挥舞力矩,以上述方式持续获得叶片挥舞力矩和转子倾斜力矩的估计值,并且也以上述方式分别将这些估计值与第一激活阈值和第二激活阈值进行比较。因此,持续调查启动单独桨距角调整的条件是否仍然适用。
41、只要估计的叶片挥舞力矩保持高于第一激活阈值并且估计的转子倾斜力矩保持高于第二激活阈值,启动单独桨距角调整的条件就仍然适用,因此单独桨距角调整应保持有效。然而,在估计的叶片挥舞力矩减小到低于第一激活阈值和/或估计的转子倾斜力矩减小到低于第二激活阈值的情况下,可以得出结论,不再需要单独桨距角调整来避免风力涡轮机叶片与塔架之间发生碰撞。因此,在这种情况下,将中断单独桨距角调整,以减少变桨轴承上的磨损。
42、该方法还可以包括在估计叶片挥舞力矩和转子倾斜力矩之前对测量的叶片挥舞力矩进行高通滤波的步骤。
43、根据该实施例,在未添加桨距偏移量的情况下,在将测量的叶片挥舞力矩用于估计叶片挥舞力矩和转子倾斜力矩之前,先去除测量的叶片挥舞力矩的静态dc部分。因此,仅使用与“快速”变化(例如阵风)相关的测量信号部分,并且可以从基于模型的计算(例如以上述方式)获得估计的叶片挥舞力矩和转子倾斜力矩的静态部分。因此,通过建模获得静态和低频部分,并从测量的叶片挥舞力矩获得高频部分。
44、估计叶片挥舞力矩的步骤和/或估计转子倾斜力矩的步骤可以包括对测量的叶片挥舞力矩应用非对称滤波器。
45、测量叶片挥舞力矩的步骤可视为在风力涡轮机叶片进入与叶片挥舞力矩测量相关的方位角区域时对风力涡轮机叶片持续进行的测量值采样。风力涡轮机叶片之间可能存在结构差异,这可能导致风力涡轮机叶片的偏转差异,即使在风力涡轮机叶片受到相同的环境影响并处于相同的桨距角时。因此,当一个风力涡轮机叶片进入测量区域而另一个风力涡轮机叶片离开测量区域时,可能发生测量的叶片挥舞力矩的中断。在这种情况下,可以应用非对称滤波器,以便使被应用于估计叶片挥舞力矩和转子倾斜力矩的信号变得平滑。
46、例如,非对称滤波器可以如下方式设计:如果测量的叶片挥舞力矩的中断表示测量的叶片挥舞力矩的减小,则应用连接两个测量点的平滑曲线,以获得平滑过渡。但是,如果测量的叶片挥舞力矩的中断表示测量的叶片挥舞力矩的增加,则立即应用较高的测量的叶片挥舞力矩,以避免获得过低的估计值,从而不会启动单独桨距角调整,即使这本来是适当的。
47、根据第二方面,本发明提供了一种用于控制风力涡轮机在塔架经过期间的叶片偏转的控制单元,该控制单元包括:
48、-用于接收风力涡轮机的风力涡轮机叶片的测量的叶片挥舞力矩的输入端,
49、-叶片挥舞力矩估计模块,其适于基于测量的叶片挥舞力矩估计在未添加桨距偏移量的情况下的风力涡轮机叶片的叶片挥舞力矩,
50、-转子倾斜力矩估计模块,其适于基于测量的叶片挥舞力矩估计在未添加桨距偏移量的情况下的转子倾斜力矩,
51、-比较单元,其适于将估计的叶片挥舞力矩与第一激活阈值进行比较,并将估计的转子倾斜力矩与第二激活阈值进行比较,以及
52、-控制输出端,其适于在估计的叶片挥舞力矩超过第一激活阈值并且估计的转子倾斜力矩超过第二激活阈值的情况下提供激活信号,该激活信号用于通过在调整区域内的方位角处添加桨距偏移量来启动风力涡轮机叶片的单独桨距角调整,所述调整区域包括与风力涡轮机叶片的塔架经过位置相对应的方位角位置。
53、因此,根据本发明的第二方面的控制单元适于执行根据本发明的第一方面的方法,并且上述论述因此同样适用于此。
54、根据第三方面,本发明提供了一种风力涡轮机,该风力涡轮机包括:塔架;可旋转地安装在塔架上的机舱;和一个或多个可调桨距的风力涡轮机叶片,它们通过轮毂可旋转地安装在机舱上,从而风力涡轮机叶片与轮毂一起相对于机舱进行方位角旋转;以及根据本发明的第二方面的控制单元。
55、因此,可以按照根据本发明的第一方面的方法来控制根据第三方面的风力涡轮机,并且上述论述因此同样适用于此。
本文地址:https://www.jishuxx.com/zhuanli/20241009/307598.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。