半实物仿真测试配准方法和系统与流程
- 国知局
- 2024-10-09 15:09:29
本发明涉及光学,具体地,涉及一种半实物仿真测试配准方法和系统。尤其地,涉及一种基于大视场偏移光轴红外图像采集设备的半实物仿真测试配准方法。
背景技术:
1、当红外图像采集设备安装于飞行器内部,由于受到结构空间小型化的限制,往往无法正常布置,这使得一些新的异型结构探测器具备相当的优势。同时,由于异型结构存在视场中心光轴与飞行器中轴线不重合,在仿真测试时目标源光瞳与探测器实际光瞳无法严格匹配的现象。当目标源通过五轴转台的外两轴进行驱动时,相对位置的变化引起目标源出瞳与探测器的光学系统之间出现偏离,使得光学探测器成像畸变或输出信号失真,带来严重的测试困难。
2、专利文献cn110568414a公开了一种基于w波段雷达系统的半实物仿真延时校准系统及方法,包括:将飞行转台固定在数字射频阵列系统的回转中心位置,并令飞行转台指向待测阵列天线的天线坐标;将自闭环延时测量模块工装支架,使自闭环延时测量模块固定在飞行转台上;所述基于w波段雷达系统的半实物仿真延时校准系统,还包括控制系统;包括:根据自闭环延时测量模块的天线延时误差测试方法测出阵列天线的阵面上指定天线的延时误差;根据测出的陈列天线延时误差建立数字射频阵列系统的延时补偿映射模型;根据延时补偿映射模型配置可变分数延时模块满足阵列的补偿需求。然而该专利无法解决目前存在的技术问题,也无法满足本发明的需求。
技术实现思路
1、针对现有技术中的缺陷,本发明的目的是提供一种半实物仿真测试配准方法和系统。
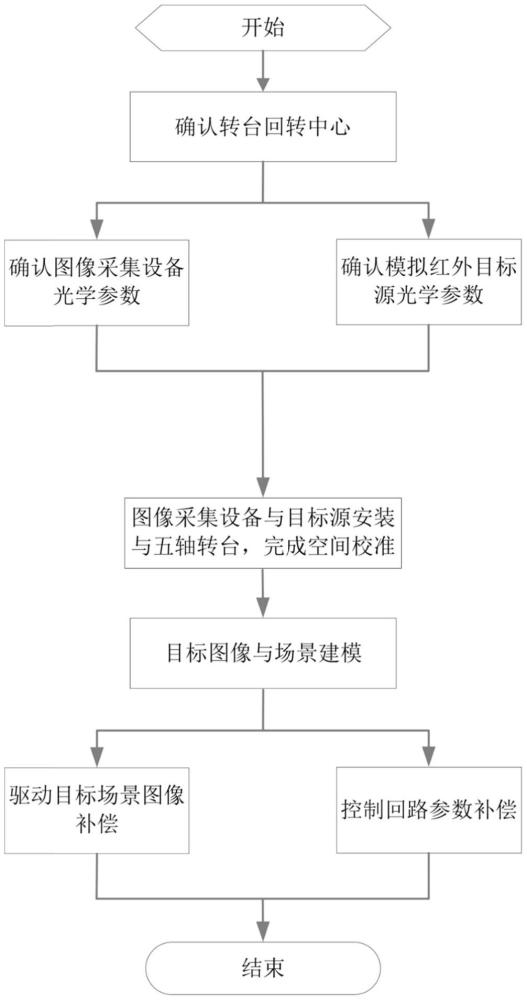
2、根据本发明提供的半实物仿真测试配准方法,包括:
3、步骤1:确认五轴转台回转中心点o;
4、步骤2:确认红外目标模拟器及红外探测器的相关光学参数,包括波段、光学视场、分辨率、光学系统光瞳位置和尺寸;
5、步骤3:确认红外探测器相对于飞行器空间内的安装方向,以模拟目标源出射光路中心轴为模拟飞行器x轴,同时确认红外探测器中心光轴与该光路的俯仰/偏航倾角与飞行器内部安装角度保持一致;
6、步骤4:通过转接工装将探测器安装于三轴转台上,模拟目标源安装于外两轴悬臂上,并完成空间位置校准和中心零位补偿;
7、步骤5:以目标位置为原点,将红外场景按照空间尺寸进行建模;
8、步骤6:当转台随动时,以相对目标俯仰/偏航视线为中心,驱动场景图像进行补偿,模拟实际飞行过程中的飞行器与目标的相对视线关系;
9、步骤7:对红外探测器注入的控制参数进行补偿,将目标相对俯仰/偏航视线角从当地地理系转换到执行坐标系后注入,使该参数与模拟空间图像进行配准。
10、优选地,模拟红外目标源的出瞳位置与红外探测器光学系统入瞳位置相匹配,如果红外探测器内部光路折转,使得光瞳面不垂直于出射光路方向时,需参考探测器出射光路方向上的等效入瞳位置,即探测器入瞳经过首面平面反射镜生成的虚像,令其与模拟目标源相匹配;
11、当目标与飞行器视线角存在夹角时,需根据飞行器真实姿态与探测器视场的相对位置转换到惯性空间内,驱动场景图像进行补偿;对红外探测器注入的控制参数和返回的参数,需转换到探测器执行坐标系内进行解算。
12、优选地,所述步骤6包括:
13、步骤6.1:以探测器视场俯仰/偏航倾角以及飞行器俯仰/偏航/滚动姿态角(θ,φ,γ)为输入,以和相对距离dr在当地地理系下的坐标(dx,dy,dz)为初值,计算其在当地地理系条件下,探测器中心视场于水平面交汇点与目标实际位置的北向/天向/东向偏移量(δx,δy,δz);
14、步骤6.2:取坐标(-δx,-δy,-δz)为视场中心,得到探测器视线方向上的场景投影,为实际仿真过程中的场景图像。
15、优选地,所述步骤7包括:
16、步骤7.1:以相对距离dr在当地地理系下的坐标(dx,dy,dz)为初值,以及当地地理系条件下的飞行器俯仰/偏航/滚动姿态角(θ,φ,γ)为输入,计算其在弹体系下的坐标(dx1,dy1,dz1);
17、步骤7.2:同理,得到相对距离drbm在探测器执行系下的坐标(dxbm,dybm,dzbm);
18、步骤7.3:计算目标在探测器执行系下的俯仰/偏航视线角(εbm,βbm);
19、
20、
21、优选地,仿真过程中,需对探测器执行系注入的视线角参数解算进行补偿,相对于飞行器弹体系ox1y1z1,红外探测器执行系oxbmybmzbm的原点位于红外探测器瞬时视场中心,oxbm轴为探测器光轴,指向目标为正;oybm轴在包含oxbm轴且与ox1z1平面垂直的平面内,与oxbm垂直,向上为正;ozbm轴由右手定则确定;其相对于飞行器弹体系的俯仰/偏航倾角分别为从弹体系到执行系转换矩阵如下:
22、
23、飞行器俯仰/偏航/滚动姿态角分别为(θ,φ,γ),由当地地理系至弹体系的转换矩阵如下:
24、
25、飞行器在当地地理系下俯仰视线角、偏航视线角为(εnβn),则地理系到视线坐标系转换矩阵为:
26、
27、通过以上坐标系的转换矩阵,对任意状态下目标视线关系进行求解,在场景图像驱动时,参考当前视线条件下的场景投影图像进行补偿。
28、根据本发明提供的半实物仿真测试配准系统,包括:
29、模块m1:确认五轴转台回转中心点o;
30、模块m2:确认红外目标模拟器及红外探测器的相关光学参数,包括波段、光学视场、分辨率、光学系统光瞳位置和尺寸;
31、模块m3:确认红外探测器相对于飞行器空间内的安装方向,以模拟目标源出射光路中心轴为模拟飞行器x轴,同时确认红外探测器中心光轴与该光路的俯仰/偏航倾角与飞行器内部安装角度保持一致;
32、模块m4:通过转接工装将探测器安装于三轴转台上,模拟目标源安装于外两轴悬臂上,并完成空间位置校准和中心零位补偿;
33、模块m5:以目标位置为原点,将红外场景按照空间尺寸进行建模;
34、模块m6:当转台随动时,以相对目标俯仰/偏航视线为中心,驱动场景图像进行补偿,模拟实际飞行过程中的飞行器与目标的相对视线关系;
35、模块m7:对红外探测器注入的控制参数进行补偿,将目标相对俯仰/偏航视线角从当地地理系转换到执行坐标系后注入,使该参数与模拟空间图像进行配准。
36、优选地,模拟红外目标源的出瞳位置与红外探测器光学系统入瞳位置相匹配,如果红外探测器内部光路折转,使得光瞳面不垂直于出射光路方向时,需参考探测器出射光路方向上的等效入瞳位置,即探测器入瞳经过首面平面反射镜生成的虚像,令其与模拟目标源相匹配;
37、当目标与飞行器视线角存在夹角时,需根据飞行器真实姿态与探测器视场的相对位置转换到惯性空间内,驱动场景图像进行补偿;对红外探测器注入的控制参数和返回的参数,需转换到探测器执行坐标系内进行解算。
38、优选地,所述模块m6包括:
39、模块m6.1:以探测器视场俯仰/偏航倾角以及飞行器俯仰/偏航/滚动姿态角(θ,φ,γ)为输入,以和相对距离dr在当地地理系下的坐标(dx,dy,dz)为初值,计算其在当地地理系条件下,探测器中心视场于水平面交汇点与目标实际位置的北向/天向/东向偏移量(δx,δy,δz);
40、模块m6.2:取坐标(-δx,-δy,-δz)为视场中心,得到探测器视线方向上的场景投影,为实际仿真过程中的场景图像。
41、优选地,所述模块m7包括:
42、模块m7.1:以相对距离dr在当地地理系下的坐标(dx,dy,dz)为初值,以及当地地理系条件下的飞行器俯仰/偏航/滚动姿态角(θ,φ,γ)为输入,计算其在弹体系下的坐标(dx1,dy1,dz1);
43、模块m7.2:同理,得到相对距离drbm在探测器执行系下的坐标(dxbm,dybm,dzbm);
44、模块m7.3:计算目标在探测器执行系下的俯仰/偏航视线角(εbm,βbm);
45、
46、
47、优选地,仿真过程中,需对探测器执行系注入的视线角参数解算进行补偿,相对于飞行器弹体系ox1y1z1,红外探测器执行系oxbmybmzbm的原点位于红外探测器瞬时视场中心,oxbm轴为探测器光轴,指向目标为正;oybm轴在包含oxbm轴且与ox1z1平面垂直的平面内,与oxbm垂直,向上为正;ozbm轴由右手定则确定;其相对于飞行器弹体系的俯仰/偏航倾角分别为从弹体系到执行系转换矩阵如下:
48、
49、飞行器俯仰/偏航/滚动姿态角分别为(θ,φ,γ),由当地地理系至弹体系的转换矩阵如下:
50、
51、飞行器在当地地理系下俯仰视线角、偏航视线角为(εnβn),则地理系到视线坐标系转换矩阵为:
52、
53、通过以上坐标系的转换矩阵,对任意状态下目标视线关系进行求解,在场景图像驱动时,参考当前视线条件下的场景投影图像进行补偿。
54、与现有技术相比,本发明具有如下的有益效果:
55、(1)本发明提供了一种基于大视场偏移光轴红外图像采集设备的半实物仿真测试配准方法,考虑到当异形红外探测器中心光轴偏移时,如何与半实物仿真系统五轴转台进行正确匹配的情况,避免了由于光瞳位置随转台驱动实时变化,所引起的红外图像畸变和信号失真等问题;
56、(2)本发明中,转台外两轴模拟目标源时刻保持与红外探测器的空间匹配一致性,其相对位置不随飞行器姿态的偏移而发生变化,通过数字场景图像的补偿,以及控制信号的解算,可模拟真实飞行情况下,探测器观测的实时图像及数据解算,具备重要的工程应用价值。
本文地址:https://www.jishuxx.com/zhuanli/20241009/307863.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表