适用于稀疏MIMO阵列的三维毫米波成像方法及系统
- 国知局
- 2024-10-09 15:24:18
本发明涉及毫米波成像,尤其涉及一种适用于稀疏mimo阵列的三维毫米波成像方法及系统。
背景技术:
1、对于通常的毫米波成像系统,提高分辨率与成像效果的最直接方法便是提高信号频率,增加信号带宽,以及通过增加收发天线提高合成孔径的大小。但受限于实际系统硬件复杂度与工程成本,以及复杂系统与庞大数据量造成的效率低下的实际效果的限制,我们需要摒弃传统算法需满足时域满采样或频域满采样的要求,通过其他方式在满足较大合成孔径的情况下减少数据的处理量,提高成像效率。
技术实现思路
1、本发明旨在至少在一定程度上解决相关技术中的技术问题之一。为此,本发明的一个目的在于提出一种适用于稀疏mimo阵列的三维毫米波成像方法及系统,解决了稀疏mimo阵列三维成像中的修正图像畸变及欠采样成像问题,缩短计算时间的同时提高了成像质量。
2、根据本发明提出的一种适用于稀疏mimo阵列的三维毫米波成像方法,所述方法步骤如下:
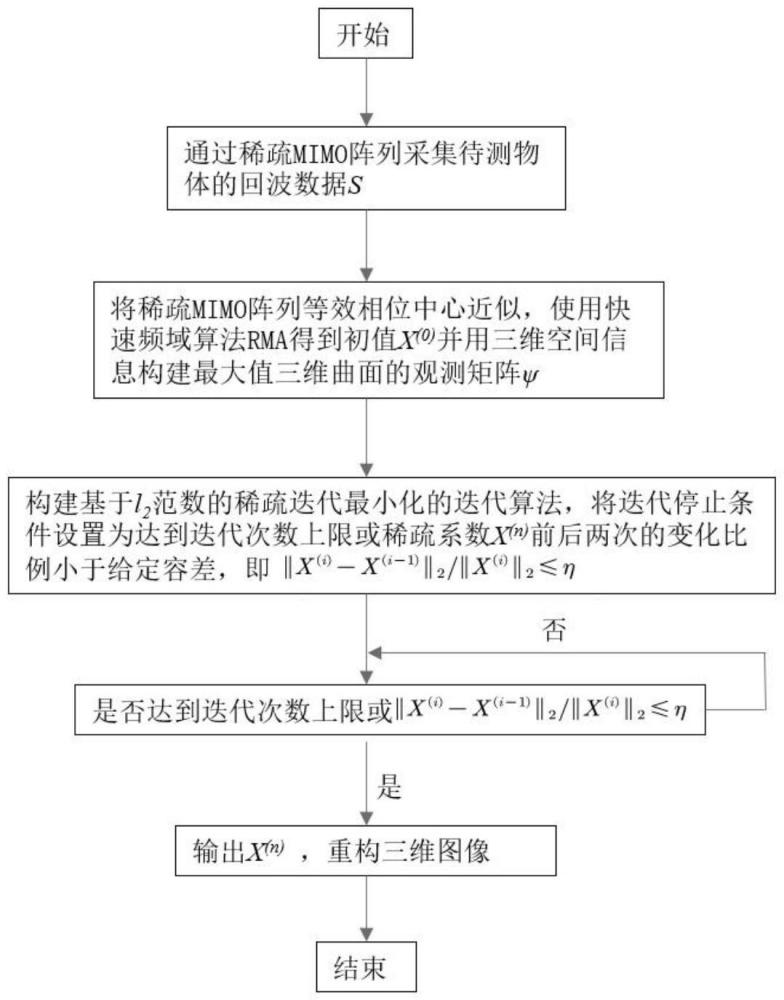
3、s1:将待测物体置于预定的成像范围内,稀疏mimo毫米波阵列的发射天线发射步进跳变的毫米波信号,接收天线获得经物体反射的电磁波信号,作为回波信号数据s,执行步骤s2;
4、s2:对回波信号数据s使用rma进行初步成像,通过对稀疏mimo阵列使用等效相位中心近似,在获得的虚拟满阵上使用快速频域算法rma,得到的图像作为初值x(0),rma得到的空间三维信息通过提取某对x,y下最大值对应的z值以构建观测矩阵ψ,其中x、y、z对应三维坐标中x、y、z轴;
5、s3:在稀疏贝叶斯学习的框架中,引入l2范数构建基于最大后验法的最小化迭代模型x(i),i表示迭代次数,以限制迭代次数上限或x(i)的改变率小于一个常数作为停止迭代条件,达到条件后停止迭代,获得的x(i)矩阵化后取模即为重构图像。
6、优选地,在步骤s1中:
7、成像区域根据相对于mimo阵列划分为x,y,z三个维度的三维网格,x,y,z三个维度的网格数量分别为nx,ny,nz,利用nt,nr分别代表发射天线与接收天线的数量,nk表示频点的数量,s(xt,yt,xr,yr,z0)代表接收到的回波信号数据,xt、yt、xr、yr、z0分别代表了mimo稀疏阵列中发射天线和接收天线的阵列坐标,根据电磁波的传播理论,回波信号与成像网格散射系数的映射,有如下关系式:
8、
9、
10、
11、其中,κ(x,y,z)代表空间成像区域各个网格点的散射系数,j代表虚数单位,dt代表空间网格点到某一个发射天线的距离,dr代表空间网格点到某一个接收天线的距离。
12、优选地,步骤s2中:
13、s21:对稀疏mimo阵列进行等效相位中心近似,得到满阵信号s′(xm,ym,k):
14、
15、
16、其中,k代表波矢,其由k=2πf/c得到,f代表电磁波的频率,c代表光速,dm、xm、ym代表空间网格点到dt与dr对应的收发对的中点处的等效相位中心的距离及中点处的坐标;
17、s22:使用快速频域算法rma,rma根据固定相理论,将球面波分解为平面波的叠加组合:
18、
19、从而我们可以得到散射系数κ(x,y,z)的表达式:
20、
21、其中kx,ky分别是相对于x,y的傅里叶变量,其取值范围从-2k至2k,分别代表2d傅里叶变换,3d逆傅里叶变换;
22、s23:将rma得到的散射系数κ(x,y,z)作为初值x(0),同时将得到的空间三维信息通过提取某对x,y下最大值对应的z值以构建观测矩阵ψ:
23、
24、
25、其中,h=1,2,…ntnrnk,nk=1,2,…nk表示频点的数目,ic=1,2,…nxny表示成像曲面网格的数目,dic表示某一个等效相位中心点相对成像曲面网格各处的距离,[·]t代表矩阵转置。
26、优选地,步骤s3中:
27、s31:根据压缩感知理论,回波信号所表示的向量y和空间网格散射系数x以及观测矩阵ψ的映射关系如下:
28、y=ψx+ζ
29、
30、
31、其中,y是向量化的回波信号s′(xm,ym,k),x是向量化的网格散射系数κ(x,y,z),ζ代表与y同维度的环境噪声,观测矩阵其中代表复数空间;
32、s32:以稀疏项和惩罚项分别符合以下概率分布为先验概率:
33、
34、f(yx,ζ)∝cn(ψx,ζi)
35、f(ζ)∝1
36、其中f(y|x,ζ)表示服从复高斯分布的概率密度函数,ψx表示期望值,ζi表示协方差,ζ表示环境噪声,i表示单位矩阵,xn表示向量化的x中第n个元素,q表示稀疏系数;
37、s33:使用最大后验估计来预估x和ζ,加入l2范数后,损失函数形式为:
38、
39、其中,m表示y的元素数量,n表示x的元素数量,表示l2范数的权重系数,xh表示x的共轭转置;
40、s34:分别对xh和ζ求微分,使求得xh和ζ的迭代式:
41、x(i)=[ψhψ+ζ(i-1)(λ(i-1))-1+τζ(i-1)i]-1ψhy
42、
43、其中i代表迭代次数,x(0)取步骤s3中rma得到的值,λ(i-1)表示一个对角矩阵,表达式如下:
44、
45、
46、迭代停止条件设置为||x(i)-x(i-1)||2/||x(i)||2≤η或迭代次数达到预设次数后,当第次的误差达到预设条件或者迭代次数达到上限,则停止迭代
47、一种适用于稀疏mimo阵列的三维毫米波成像方法搭建的系统,包括:频率信号发生单元、稀疏mimo阵列、计算机控制单元和用于搭载待测目标的成像区域,所述的频率信号发生单元的信号输出端与所述稀疏mimo阵列的信号输入端连接,所述计算机控制单元的信号输出端与所述稀疏mimo阵列的信号输入端连接,所述稀疏mimo阵列的信号输出端与所述计算机控制单元的信号输入端连接。
48、本发明中的有益效果是:
49、(1)稀疏mimo阵列搭配快速频域算法得到的图像存在较大畸变,图像质量低,本发明将压缩感知用于稀疏mimo阵列rma成像的图像修正过程,所用计算时间相比传统算法大幅缩减,且图像质量相对rma大幅提升,可在较低的采样率下,较好地消除rma和强欠采样带来的伪影和杂波,并且计算时间相较于传统bp算法大大缩短;
50、(2)相比于传统压缩感知算法,本发明引入的l2范数可以给出一个相对稠密的稀疏解,而这符合实际成像区域中物体部分区域信号反射强度较弱的特点,从而使稀疏重构能够更完整地重构完整物体和边缘细节,相对于传统压缩感知算法能更快达到迭代收敛条件,提高计算效率。
技术特征:1.一种适用于稀疏mimo阵列的三维毫米波成像方法,其特征在于,所述方法步骤如下:
2.根据权利要求1所述的一种适用于稀疏mimo阵列的三维毫米波成像方法,其特征在于,在步骤s1中:
3.根据权利要求2所述的一种适用于稀疏mimo阵列的三维毫米波成像方法,其特征在于,步骤s2中:
4.根据权利要求3所述的一种适用于稀疏mimo阵列的三维毫米波成像方法,其特征在于,步骤s3中:
5.根据权利要求1-4任一项所述的一种适用于稀疏mimo阵列的三维毫米波成像方法搭建的系统,其特征在于,包括:频率信号发生单元(21)、稀疏mimo阵列(22)、计算机控制单元(23)和用于搭载待测目标(25)的成像区域(24),所述的频率信号发生单元(21)的信号输出端与所述稀疏mimo阵列(22)的信号输入端连接,所述计算机控制单元(23)的信号输出端与所述稀疏mimo阵列(22)的信号输入端连接,所述稀疏mimo阵列(22)的信号输出端与所述计算机控制单元(23)的信号输入端连接。
技术总结本发明公开了一种适用于稀疏MIMO阵列的三维毫米波成像方法,包括:将待测物体置于预定的成像范围内,稀疏MIMO毫米波阵列的发射天线发射步进跳变的毫米波信号,接收天线获得经物体反射的电磁波信号,作为回波信号数据S;通过对稀疏MIMO阵列使用等效相位中心近似,在获得的虚拟满阵上使用快速频域算法RMA,得到的图像作为初值X<supgt;(0)</supgt;,RMA得到的空间三维信息通过提取某对x,y下最大值对应的z值以构建观测矩阵Ψ,其中x、y、z对应三维坐标中x、y、z轴;在稀疏贝叶斯学习的框架中,引入l<subgt;2</subgt;范数构建基于最大后验法的最小化迭代模型,达到条件后停止迭代,获得的X<supgt;(i)</supgt;矩阵化后取模即为重构图像。本发明能在保证较高时间计算效率的情况下获得高质量的优化图像。技术研发人员:涂昊,於利斌,王兆龙受保护的技术使用者:合肥工业大学技术研发日:技术公布日:2024/9/29本文地址:https://www.jishuxx.com/zhuanli/20241009/308625.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表