基于transformer模型的船舶轨迹异常点检测方法、设备和介质与流程
- 国知局
- 2024-10-09 15:38:58
本发明涉及船舶轨迹异常检测,尤其是一种基于transformer模型的船舶轨迹异常点检测方法、设备和介质。
背景技术:
1、海洋航运作为世界贸易的重要组成部分,随着多源传感器和无线网络通信等技术的发展,海量轨迹大数据知识挖掘成为了智慧交通、智慧海洋等新型服务体系建设的研究热点。海上交通特征规律蕴含于船舶自动识别系统(automatic identification system,以下简称ais)历史数据中。
2、但在数据传输过程中存在通信链路及卫星定位信号等方面的干扰,导致ais数据给出的船舶轨迹含有较多的噪声数据,严重影响了进一步的数据分析和数据挖掘,不利于对ais数据的进一步合理利用,增加了船舶轨迹预测、可疑行为识别等船舶航行知识挖掘的难度。
技术实现思路
1、有鉴于此,本发明实施例提供一种基于transformer模型的船舶轨迹异常点检测方法、设备和介质。
2、本发明的第一方面提供了一种基于transformer模型的船舶轨迹异常点检测方法;包括以下步骤:
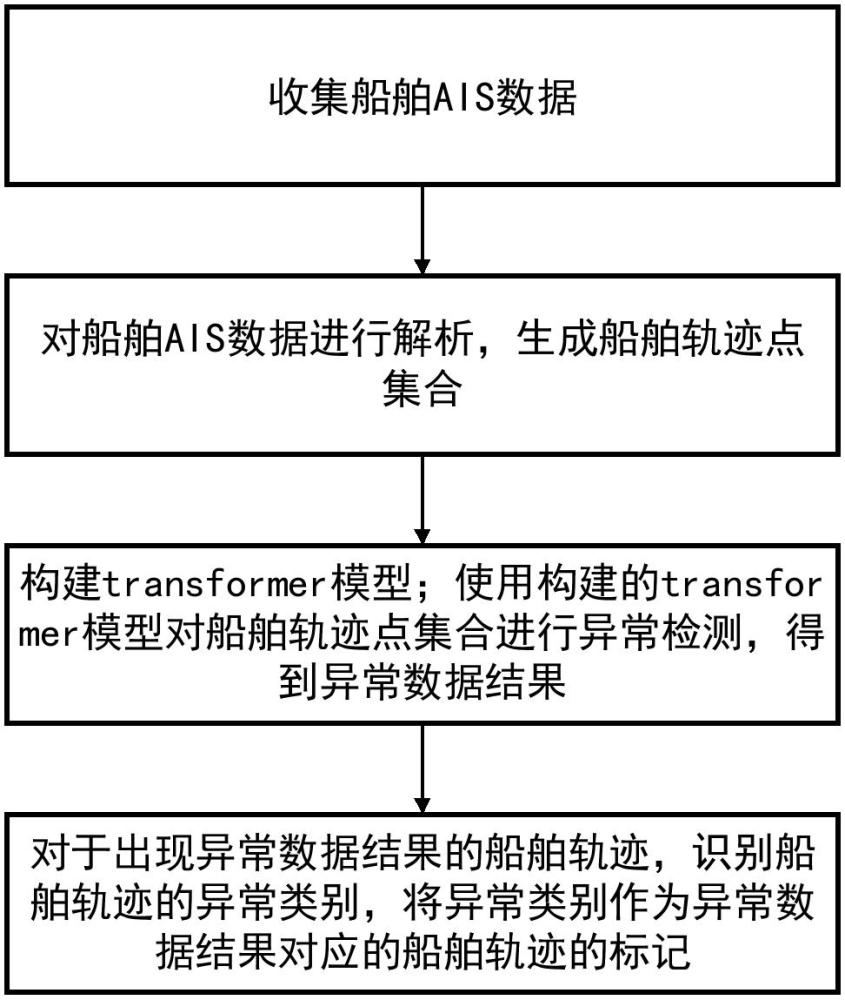
3、收集船舶ais数据;
4、对所述船舶ais数据进行解析,生成船舶轨迹点集合;
5、构建transformer模型;使用构建的transformer模型对所述船舶轨迹点集合进行异常检测,得到异常数据结果;
6、对于出现异常数据结果的船舶轨迹,识别所述船舶轨迹的异常类别,将所述异常类别作为异常数据结果对应的船舶轨迹的标记。
7、进一步地,所述船舶ais数据包括船舶mmsi号、预期航线、船舶航行速度、船舶经度和船舶纬度;所述船舶轨迹点集合根据船舶mmsi号构建,所述船舶轨迹点集合中船舶轨迹点以发生时间顺序排列,每个船舶轨迹点中记录当前时刻船舶的方位角、船舶移动距离和船舶转向率。
8、进一步地,所述当前时刻船舶的方位角、船舶移动距离通过当前时刻船舶经度和船舶纬度与上一时刻船舶经度和船舶纬度计算得到;所述当前时刻船舶转向率根据当前时刻船舶的方位角和船舶的航行速度计算得到。
9、进一步地,在所述对所述船舶ais数据进行解析,生成船舶轨迹点集合步骤之后,还包括以下步骤:
10、对所述船舶轨迹点集合进行归一化处理;所述归一化处理通过以下公式计算:
11、;
12、式中,pj表示船舶轨迹点集合第j项属性数据集合,pij表示船舶轨迹点集合第i个轨迹点的第j项数据。
13、进一步地,所述构建transformer模型,具体包括以下步骤:
14、收集用于模型与训练的船舶ais数据,组成训练集与测试集;
15、将训练集输入初始transformer模型,得到初始transformer模型输出的异常数据结果;
16、使用测试集对初始transformer模型输出的异常数据结果进行评价,根据评价结果迭代优化初始transformer模型;直至transformer模型输出的异常数据结果达到预设评价阈值。
17、进一步地,所述使用构建的所述transformer模型对所述船舶轨迹点集合进行异常检测,得到异常数据结果,具体包括以下步骤:
18、将所述船舶轨迹点集合编码为token embedding和position embedding;
19、对token embedding和position embedding进行l层卷积,得到基础向量x;
20、对基础向量x分别使用搭载、、、权重矩阵的全连接层进行线性变化,得到q、k、v、σ四个向量;q=wlq,k=,ν=,σ=;
21、其中,wlq表示轨迹点查询向量的权重矩阵,表示轨迹点关键字向量的权重矩阵,表示轨迹点值向量的权重矩阵,表示高斯核可学习尺度参数的权重矩阵;
22、将q、k、v输入transformer注意力层,使用q中每一元素与k的转置矩阵中每一元素分别计算点积,得到qkt;将qkt与预设向量纬度相除得到注意力矩阵;
23、将注意力矩阵输入softmax层进行softmax运算并与v相乘得到相邻模式z;
24、通过高斯核函数与权重矩阵计算捕捉异常变化p,将相邻模式z和异常变化p的极值关联结果作为异常数据结果输出。
25、进一步地,所述异常类别包括重复点、航迹位置异常、航向变化异常和未知异常;所述对于出现异常数据结果的船舶轨迹,识别所述船舶轨迹的异常类别,具体包括以下识别过程:
26、对于船舶经度和船舶纬度完全相同且船舶航行速度不为0的相邻轨迹点,识别为重复点;
27、对于船舶经度和船舶纬度偏离预设船舶航线预设距离的轨迹点,识别为航迹位置异常;
28、对于船舶转向率大于预设转向率阈值的轨迹点,识别为航向变化异常;
29、对于不存在重复点、航迹位置异常、航向变化异常但出现异常数据结果的船舶轨迹,识别为未知异常。
30、本发明第二方面公开一种电子设备,包括处理器以及存储器;
31、所述存储器用于存储程序;
32、所述处理器执行所述程序实现所述的方法。
33、本发明第三方面公开一种计算机可读存储介质,所述存储介质存储有程序,所述程序被处理器执行实现所述的一种基于transformer模型的船舶轨迹异常点检测方法。
34、本发明的实施例具有如下方面有益效果:本发明在船舶ais数据中应用了无监督检测训练的transformer模型进行船舶轨迹异常检测,对于模型识别异常的轨迹点进一步划分异常类别,对不同异常数据进行解释以便对船舶ais数据进行进一步的数据清洗等操作。本发明将时间序列异常点的无监督检测应用到船舶轨迹异常检测中,能较好地挖掘船舶ais数据的深层特征,广泛应用于船舶轨迹异常检测技术领域中。
35、本发明的附加方面和优点将在下面的描述部分中给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:1.一种基于transformer模型的船舶轨迹异常点检测方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种基于transformer模型的船舶轨迹异常点检测方法,其特征在于,所述船舶ais数据包括船舶mmsi号、预期航线、船舶航行速度、船舶经度和船舶纬度;所述船舶轨迹点集合根据船舶mmsi号构建,所述船舶轨迹点集合中船舶轨迹点以发生时间顺序排列,每个船舶轨迹点中记录当前时刻船舶的方位角、船舶移动距离和船舶转向率。
3.根据权利要求2所述的一种基于transformer模型的船舶轨迹异常点检测方法,其特征在于,所述当前时刻船舶的方位角、船舶移动距离通过当前时刻船舶经度和船舶纬度与上一时刻船舶经度和船舶纬度计算得到;所述当前时刻船舶转向率根据当前时刻船舶的方位角和船舶的航行速度计算得到。
4.根据权利要求1所述的一种基于transformer模型的船舶轨迹异常点检测方法,其特征在于,在所述对所述船舶ais数据进行解析,生成船舶轨迹点集合步骤之后,还包括以下步骤:
5.根据权利要求1所述的一种基于transformer模型的船舶轨迹异常点检测方法,其特征在于,所述构建transformer模型,具体包括以下步骤:
6.根据权利要求2所述的一种基于transformer模型的船舶轨迹异常点检测方法,其特征在于,所述异常类别包括重复点、航迹位置异常、航向变化异常和未知异常;所述对于出现异常数据结果的船舶轨迹,识别所述船舶轨迹的异常类别,具体包括以下识别过程:
7.一种电子设备,其特征在于,包括处理器以及存储器;
8.一种计算机可读存储介质,其特征在于,所述存储介质存储有程序,所述程序被处理器执行实现如权利要求1-6中任一项所述的一种基于transformer模型的船舶轨迹异常点检测方法。
技术总结本发明公开了一种基于transformer模型的船舶轨迹异常点检测方法、设备和介质;方法包括以下步骤:收集船舶AIS数据;对船舶AIS数据进行解析,生成船舶轨迹点集合;构建transformer模型;使用构建的transformer模型对船舶轨迹点集合进行异常检测,得到异常数据结果;对于出现异常数据结果的船舶轨迹,识别船舶轨迹的异常类别,将异常类别作为异常数据结果对应的船舶轨迹的标记。本发明在船舶AIS数据中应用了无监督检测训练的transformer模型进行船舶轨迹异常检测,对于模型识别异常的轨迹点进一步划分异常类别,对不同异常数据进行解释以便对船舶AIS数据进行进一步的数据清洗等操作,可应用于船舶轨迹异常检测技术领域中。技术研发人员:吉才盈,邝晗宇,邵长高,谢世达,陆天启受保护的技术使用者:广州海洋地质调查局三亚南海地质研究所技术研发日:技术公布日:2024/9/29本文地址:https://www.jishuxx.com/zhuanli/20241009/309460.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。