一种基于毫米波雷达的旋转机械故障检测方法及系统
- 国知局
- 2024-10-15 10:19:11
本发明涉及一种基于毫米波雷达的旋转机械故障检测方法及系统,属于雷达检测领域。
背景技术:
1、旋转机械在制造业中被广泛采用,它由传递动力和扭矩的旋转轴进行驱动。在长时间使用后,旋转机械很可能会出现一系列故障,产生严重安全隐患。当旋转机械出现异常时,细粒度的角速度信息会出现异常情况,因此通过监测细粒度的角速度信息,可以判断旋转机械的健康情况。传统的检测方法按照传感器主要可以分为三类,第一,光转速计和编码器,光转速计通过转盘上的光标记可以获得转盘旋转一周的平均角速度,但无法获得更细粒度的角速度信息,同时光编码器需要部署特制的轴盘,轴盘上面密布透明和不透明的片段,以获取更细粒度的角速度信息。第二,imu传感器,其中有线陀螺仪可以连接到轴盘上进行角速度测量。第三,基于射频信号的方法,主要利用rfid,wifi和毫米波信号对转盘角速度进行感知和测量,但是rfid和wifi的检测速度粒度和范围都很差,最近利用毫米波信号进行角速度测量的工作只能获得旋转机械的平均速度。总而言之,以上传统工作在实际过程中部署十分繁琐,或者无法获得细粒度的角速度信息。
技术实现思路
1、因此针对以上不足,本发明提出了基于毫米波雷达的旋转机械故障检测装置,在部署简单的条件下,通过测量装置细粒度的角速度信息判断旋转装置的异常情况,实现旋转装置故障的实时监测。其技术方案为:
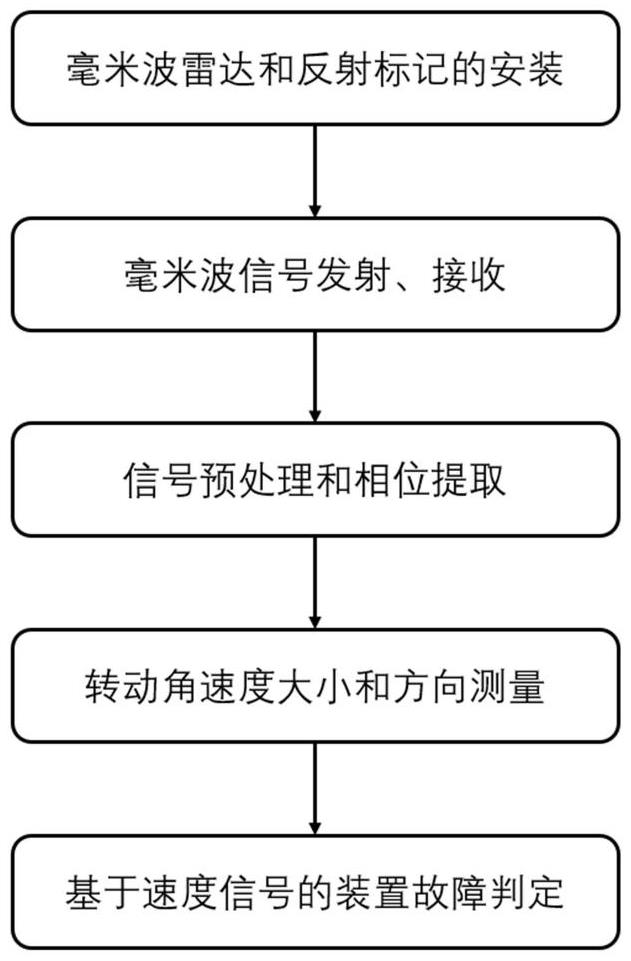
2、一种基于毫米波雷达的旋转机械故障检测方法,包括以下步骤:
3、s1.将毫米波雷达部署于旋转装置的一侧,所述旋转装置上设有毫米波信号反射标签;选取起始点,测得标记起始点相对毫米波雷达的距离和角度偏移;
4、s2.毫米波雷达的发射天线发送调频连续波信号,信号传播到反射器后由其反射返回到雷达的接收天线,发射信号和反射信号随后经混频器得到中频信号;
5、s3.信号预处理和相位提取;
6、s4.测量旋转装置的角速度和方向。
7、优选的,步骤s2中,对于判断旋转装置的转盘的角速度方向,在标记旋转一周过程中,通过判断一对相邻接收天线的相位差的变化模式来确定转盘的转动方向;在顺时针转动过程中,相邻天线的相位差呈由正到负的正弦波形,而在逆时针的转动过程中,相邻天线的相位差的波形恰好与之相反。
8、优选的,步骤s4中,包括转盘距离检测和静态杂波滤除;
9、转盘距离检测步骤如下:
10、1)把接收到的信号划分为固定时长窗口进行距离多普勒频率检测;
11、2)通过距离仓中信号的振幅大小,来区分转盘和周围静态物体,
12、3)对于只有单个转盘的情况,信号最大振幅的距离仓就是转盘的位置;对于多个装置转盘放置在毫米波雷达周围的情况,首先使用峰值检测算法检测出一组候选距离仓,而后只保留由于标签转动相位呈周期性变化的距离仓,以此将旋转的转盘和环境中其他静态物体区分开来,实时监测转盘。
13、静态杂波滤除步骤如下:
14、1)通过计算接收信号的复数均值,然后从信号中减去平均值来估计动态信号的中心,以消除静态信号效应;
15、2)应用两个滤波器来消除相位噪声:hampel滤波器,用于去除相位异常值;savitzky-golay滤波器,在热噪声下平滑相位;最终提取信号的相位。
16、优选的,步骤s4中,假设在标签从a点开始旋转一段时间后,标签旋转到达p点,此时相对a点的旋转角度为θt,构建相位-角度模型如下:
17、
18、η=(da+r)2+r2;
19、γ=-2r·(da+r);
20、转盘标签到轴心o的半径为r;标签距离雷达最近点a到雷达的距离为da;λ毫米波的波长;
21、要测得旋转角度大小需要首先确定η和γ两个常量参数,而后通过模型计算得到旋转角度大小,确定转盘角速度大小。
22、优选的,步骤s4中,对于r的参数估计步骤如下:
23、1)选取四个几何关键点:转盘上标签距离雷达最近点a;标签距离雷达最远点b;标签轨迹圆与雷达得上正切点c;相对于c点的下正切点d;
24、2)已知在a点和b点处反射信号的相位分别为:
25、
26、因此a点和b点的相位差可以表示为:
27、整理可得
28、3)提取a点和b点之间的相位差:在相位序列上使用峰值检测算法来提取每个信号窗口中的所有a和b相位值;计算每两个相邻的高峰和低峰之间的相位差;将所有相位差值的平均值取为δφb,a。
29、优选的,步骤s4中,c点、d点和o点存在oc⊥rc,od⊥rd的关系,对于da的参数估计方法如下:在基于边长关系的自估计方法中,在δocr中利用勾股定理,可得|rc|2=|ro|2-|co|2,其中|ro|=|ra|+|ao|=da+r,|co|=r,整理可得
30、提取a点和c点的相位,构造相位差与距离差的关系可得:
31、
32、由上述公式构造出等式:
33、
34、整理可得通过计算a点和c点位置的信号相位差δφc,a,估计出参数da的大小。
35、优选的,步骤s4中,对于da的参数估计方法如下:
36、在基于角度关系的自估计的方法中,在δocr中利用∠cro与边长的几何关系构造出如下等式,设∠cro和∠dro分别为βc和βd,|βc|=|βd|,
37、设c点和d点与毫米波雷达的夹角为αc和αd,由于∠crd=|βc|+|βd|,∠crd=|αc|+|αd|,因此有|βc|+|βd|=|αc|+|αd|,即
38、对于αc和αd的大小均可以由毫米波雷达一对天线rx1和rx2的相位差测量获得,有关系如下因此可得此时可以得到如下等式,令可得通过计算c点和d点出一堆天线的相位差可以准确估计出da参数大小。
39、优选的,步骤s4中,转速估计方法如下:
40、利用以下公式计算出一段时间t内的转动角度θp(t):
41、
42、在一段时间内对反射信号采样n次,利用峰值检测算法检测出所有最小峰的信号相位,即全部a点处的相位,相邻的两个a点相位代表着转盘转动了一周;在每周内进行nr次采样,可测得第i个采样点的相位与a点处相位差δφp,a(i)=φp(i)-φa;
43、通过相位-角度模型可以得到从a点到第i个采样点之间的转动角度θp(i);
44、因此,δθp(i)=|θp(i)-θp(i-ε)|,ε∈{1,2,…,nr},最后计算得出该采样点的转动角速度通过调整不同ε的大小,可以控制该采样点角速度的不同测量精度。
45、优选的,步骤s4中,转速方法检测方法如下:通过峰值检测算法检测到b点处信号的相位,而后提取b点附近的相位差计算范围:[bind-σ,bind+σ],其中bind表示b点峰值相位的索引,默认σ为相邻信号相位峰脊和峰谷之间采样点数的四分之一;计算该范围内的相位差变化斜率:如果该斜率为负则表示转盘顺时针旋转,反之,则表示转盘逆时针旋转。
46、一种故障检测系统,包括信号采集模块、处理模块和输出模块;
47、所述信号采集模块:获取毫米波雷达发射天线发送调频连续波信号;
48、处理模块:信号预处理,根据构建相位-角度模型进行相位提取;
49、输出模块:输出角速度曲线及故障类型。
50、与现有技术相比,本技术有益效果如下:
51、本发明基于低成本的毫米波雷达实现旋转装置细粒度的角速度测量,现有的工作包括基于光转速计和编码器的方法,基于imu传感器的方法和基于射频信号的方法,这些方法都无法在简单部署的前提下对装置转速进行细粒度测量。本发明一方面在实际工作部署中十分简单便利,仅仅需要部署一个毫米波雷达和一个标记。另一方面本发明可以细粒度且精确地测量装置的转速并判断旋转方向,比现有工作在粒度上提高了16倍,在准确度上提高了7倍。适合在商用条件下精确地检测旋转装置的故障。
本文地址:https://www.jishuxx.com/zhuanli/20241014/317240.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表