一种共视场车载多激光雷达外参自动标定系统及标定方法与流程
- 国知局
- 2024-10-15 09:29:22
本发明涉及自动驾驶,尤其涉及一种共视场车载多激光雷达外参自动标定系统及标定方法。
背景技术:
1、目前激光雷达作为智能驾驶主传感器相较于毫米波雷达,激光雷达在探测精度、探测范围及稳定性方面更有优势。在精确度方面,由于频段的原因,毫米波雷达的探测距离越远,频段损耗就会越大,因此较难感知行人,并且对周边所有障碍物无法进行精准的建模。在暗光条件下,激光雷达也比相机表现更好,产生的误差更少。以光速测量环境中的距离。在暗光条件下,激光雷达也比相机表现更好,产生的误差更少。与毫米被雷达相比,激光雷达提供了更好的分辨率,可以感知物体的形状,从而获得更好的标检测和分类。一辆智能驾驶车辆往往需要多个激光雷达作为感知源,且因为车辆个体差异以及激光雷达安装过程存在误差,所以多激光雷达标定必不可少。
2、传统激光雷达标定方法是通过仪器测量多个激光雷达之间x、y、z方向上的距离以及横滚角、俯仰角和偏航角来对多个雷达进行标定;另外一种常用的方法是通过仪器显示多个雷达的点云数据,然后将待标定雷达点云数据向另外一个雷达点云数据上手动拟合,同时记录点云的平移和旋转,当两者点云重合时记录标定点云的转移矩阵,即得到标定结果。传统的标定方法缺点是慢,效率不高,需要有一定的标定经验。所以寻找一种快速自动化并且零门槛标定的方法是亟需解决的问题。
技术实现思路
1、本发明的目的是针对现有技术的不足从而提供一种共视场车载多激光雷达外参自动标定系统及标定方法。
2、本发明是采用如下技术方案来实现的:
3、一种共视场车载多激光雷达外参自动标定系统,包括
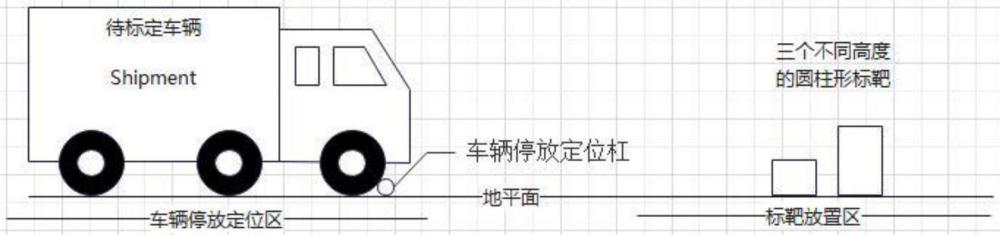
4、标定场地,所述标定场地设于室内且无障碍物,所述标定场地包括车辆停放区、标靶放置区及标靶;
5、车辆停放区,用于放置待标定车辆;
6、标靶放置区,设于待标定车辆前方,所述标靶放置区设有若干标靶,所述若干标靶位于待标定车辆前方2m-6m;
7、标靶,所述标靶为三个直径为0.5m的圆柱体标靶,包括b3标靶、b2标靶及b1标靶,其中b3标靶的高度为0.2m,b2标靶的高度为0.5m,b1标靶的高度为0.8m;
8、b3标靶、b2标靶及b1标靶呈三角型排列,其中b3标靶后端左侧设有b1标靶,b3标靶后端右侧设有b2标靶;
9、待标定车辆,设有激光雷达,激光雷达用于获取标靶的点云数据,点云数据包括基准激光雷达点云p2、左侧激光雷达点云p1及右侧激光雷达点云p3;
10、激光雷达包括设于车辆保险杠中心位置的基准激光雷达,以及分别设于左、右后视镜下端的左侧激光雷达及右侧激光雷达;
11、基准激光雷达获取基准激光雷达点云p2、左侧激光雷达获取左侧激光雷达点云p1,右侧激光雷达获取右侧激光雷达点云p3;
12、交换机,用于将点云数据传输至控制器;
13、控制器,用于分析点云数据并得出雷达标定参数信息。
14、优选的,所述标靶为金属材质,所述标定场地的长度≥待标定车辆的长度+8m,所述标定长度的高度≥待标定车辆的高度+1m,所述车辆停放区的平整度误差≤5mm,所述标靶放置区的平整度误差≤3mm。
15、一种共视场车载多激光雷达外参自动标定方法,应用于如上所述的共视场车载多激光雷达外参自动标定系统,包括以下步骤:
16、s1,标定准备:将待标定车辆驶入车辆停放区;
17、s2,数据获取:待标定激光雷达扫描出标靶的点云数据;
18、s3,数据滤波:将s2中的点云数据进行滤波,滤除0.1m到1m以及8m之外的点云数据,保留1m到8m之间的点云数据;
19、s4,参考帧生成:生成平行且z=0的10m×10m的点云平面记作地平面参考帧点云p4;
20、s5,基准激光雷达标定:即确定横滚角、俯仰角及偏航角;通过平面拟合的方式,标定横滚角和俯仰角,偏航角通过θ=φ-arccos(l/s)标定,其中标靶到基准激光雷达间的距离为s,标靶到基准激光雷达间距离在基准激光雷达的y轴上的投影为l,基准激光雷达安装方向为y方向,基准激光雷达安装方向与基准激光雷达-标靶之间连线方向夹角为φ,基准激光雷达安装方向与基准激光雷达的y轴方向之间的夹角为θ;
21、s6,多雷达间标定,即将左侧激光雷达、右侧激光雷达的横滚角、俯仰角及偏航角,与基准激光雷达的横滚角、俯仰角及偏航角统一至同一坐标系中;基准激光雷达、左侧激光雷达及右侧激光雷达分别检测出标靶上平面中心点,通过拟合标靶方式求出转换矩阵;
22、s7,将电脑通过can分析仪与待标定车辆obd接口连接,写入标靶信息,完成标定。
23、优选的,s5中,标定横滚角和俯仰角为:
24、利用体素滤波器voxelgrid对基准激光雷达点云p2进行降采样,降采样后的点云记作p2′,通过随机采样一致性算法设置平面模型,对p2′进行最大点云平面分割,从单帧激光点云中提取最大平面点云,即地平面目标帧点云p2″,将地平面目标帧点云p2″拟合至地平面参考帧点云p4,由于地平面目标帧点云p2″及地平面参考帧点云p4均为空间中点云平面,即p4=np2″+t+n,其中n为旋转矩阵,t为平移矩阵,n为p2″与p4的差值,计算得到旋转矩阵n,即基准激光雷达到地平面的旋转矩阵,完成横滚角和俯仰角的标定。
25、优选的,s5中,偏航角及基准激光雷达的y轴与待标定车辆的x轴之间的夹角为0°,待标定车辆驶入车辆停放区,若基准激光雷达安装无偏转,基准激光雷达与b3标靶连线-待标定车辆平行,此时s=l,φ=θ=0°;
26、若基准激光雷达安装有偏转,基准激光雷达与b3标靶连线-待标定车辆平行,此时s=l,θ=φ≠0,基准激光雷达感知到标靶的方位信息为b3标靶与基准激光雷达连线的φ角度和基准激光雷达到b3标靶的连线距离,φ角基准激光雷达直接输出;
27、若基准激光雷达安装无偏转,基准激光雷达与b3标靶连线-待标定车辆有夹角,此时s>l,θ=φ-arccos(l/s)=0°;
28、若基准激光雷达安装有偏转,基准激光雷达与b3标靶连线-待标定车辆有夹角,此时s>l,θ=φ-arccos(l/s),基准激光雷达感知到标靶的方位信息为b3标靶与基准激光雷达连线的φ角度和基准激光雷达到b3标靶的连线距离,φ角基准激光雷达直接输出。
29、优选的,将点云p2′通过随机采样一致性算法设置圆柱体模型,定义圆柱体模型设置参数x、y、z、i、j、k、r、l、m、n,其中x、y、z为圆柱体模型侧表面上的任意一点,i、j、k为圆柱体模型轴线上的任意一点,r为圆柱体模型半径,l、m、n为圆柱体模型轴线向量;
30、(x-i)^2+(y-j)^2+(z-k)^2-r^2=[l(x-i)+m(y-j)+n(z-k)]^2;
31、通过公式分别检测到b3标靶、b2标靶及b1标靶,分别求解出b3标靶、b2标靶及b1标靶上表面圆心坐标m3、m2、m1,此时上表面圆心坐标m3、m2、m1通过基准激光雷达坐标系求出。
32、优选的,将左侧激光雷达点云p1的点云数据,利用体素滤波器voxelgrid进行降采样,通过随机采样一致性算法设置圆柱体模型;
33、(x-i)^2+(y-j)^2+(z-k)^2-r^2=[l(x-i)+m(y-j)+n(z-k)]^2
34、通过公式,分别检测到b3标靶、b2标靶及b1标靶,分别求解出b3标靶、b2标靶及b1标靶上表面圆心坐标l3、l2、l1,此时上表面圆心坐标l3、l2、l1通过左侧激光雷达坐标系求出;
35、通过上表面圆心坐标m3、m2、m1、l3、l2、l1求解基准激光雷达坐标系与左侧激光雷达坐标系的变换矩阵,即三维钢体转换模型:
36、m=n×l+t
37、式中,m为基准激光雷达坐标系、l为左侧激光雷达坐标系、n为旋转矩阵、t为平移矩阵,求解n与t,完成左侧激光雷达到基准激光雷达的标定。
38、优选的,将右侧激光雷达点云p3的点云数据,利用体素滤波器voxelgrid进行降采样,通过随机采样一致性算法设置圆柱体模型;
39、(x-i)^2+(y-j)^2+(z-k)^2-r^2=[l(x-i)+m(y-j)+n(z-k)]^2
40、通过公式,分别检测到b3标靶、b2标靶及b1标靶,分别求解出b3标靶、b2标靶及b1标靶上表面圆心坐标r3、r2、r1,此时b3、b2、b1标靶上表面圆心坐标r3、r2、r1通过右侧激光雷达坐标系求出;
41、通过上表面圆心坐标m3、m2、m1、r3、r2、r1求解基准激光雷达坐标系与右侧激光雷达坐标系的变换矩阵,即三维钢体转换模型。
42、优选的,所述s7包括:
43、s71,将待标定车辆开往车辆停放区,将电脑通过can分析仪与待标定车辆的obd接口连接,打开上位机,通过统一诊断服务uds开始标定;
44、s72,开启诊断会话控制;
45、s73,进行安全访问,同意安全访问后,发送安全密钥;
46、s74,安全密钥验证通过后,写入标靶参数和标定追溯信息;
47、s75,开始请求标定流程;
48、s76,判断是否开始标定;当判断未进入标定流程,通过故障码dtc判断失败原因,清除故障码dtc后,重新请求标定;判断进入标定流程;
49、s77,进入标定流程后等待标定完成;
50、s78,请求标定结果;
51、s79,读取标定结果;
52、s710,将标定结果写入控制器;
53、s711,标定完成,将待标定车辆驶离车辆停放区。
54、优选的,所述s79包括:
55、标定成功;
56、标定未完成,转到s77继续等待标定;
57、标定失败,标定失败后结束标定,解决失败问题后,准备下一次标定。
58、与现有技术相比,本发明具有以下有益的技术效果:
59、1.适合主机厂下线量产标定;
60、2.无需任何传感器标定知识储备,标定门槛低;
61、3.标定效率高,产线标定只需2分钟;
62、4.相比传统的标定方案无需其他传感器辅助,节省成本。
63、5.标定场地建设简单便捷,切无需跑车标定,适合主机厂整车下线标定。
本文地址:https://www.jishuxx.com/zhuanli/20241015/314306.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。