一种融合稀疏点云数据和加速度数据测量结构位移的方法
- 国知局
- 2024-10-15 09:30:33
本发明涉及位移测量,具体为一种融合稀疏点云数据和加速度数据测量结构位移的方法。
背景技术:
1、位移的测量对建筑结构至关重要,因为它被认为是评估建筑结构安全性的主要指标之一。结构位移还可以帮助识别结构的模态参数和更新结构的有限元模型。许多技术可以应用于结构位移测量,它们可以分为接触式或非接触式技术。线性可变差动变压器(lvdt)、加速度计和全球导航卫星系统(gnss)是典型的接触式传感器。lvdt测量结构位移时,需要在距测量点约50厘米的距离处固定支撑点,这对于实际应用中很难满足。加速度计只能测量结构高频位移,而gnss通常采样率较低(<20hz),并且其精度也较低。此外,在卫星数量较少、天气条件恶劣或gnss天线的视野被遮挡时,测量精度会进一步降低,无法满足实际工程监测精度要求。近年来,激光多普勒测振仪、微波雷达系统、光学成像系统等设备已被开发用于非接触位移测量。然而,ldv和微波雷达系统只能估计视线方向上的位移,而光学成像系统难以高精度地估计面外位移,并且其性能对照明条件敏感。
2、激光雷达是另一种可用于非接触式位移测量的设备。它首先基于时差法或相位法来确定物体与激光雷达之间的距离,然后基于距离的变化得到位移。不同于其他非接触型设备,激光雷达可以测量三维位移,并且对照明条件不太敏感。此外,与基于视觉的技术需要比例因子来将像素单元处的目标移动转换为物理长度单元处的位移不同,激光雷达可以直接测量物理长度单元的位移。然而,激光雷达通常需要较长的扫描时间以达到位移测量精度,从而限制了其在结构动态位移测量中的应用。尽管有少量基于激光雷达测试结构动态位移的尝试。这些研究大多采用线扫描型激光雷达,只测量单通道激光的点数据。因此,需要谨慎选择激光雷达的安装位置并预先精确对准结构监测点,以确保激光的稳定反射。此外,这些研究使用的激光雷达非常昂贵,无法在实际工程中广泛使用。有学者采用了32通道机械式激光雷达,可以同时估计结构多个位置处的位移,且设备相对便宜。然而,在有限的距离范围内只能达到厘米级的精度。
技术实现思路
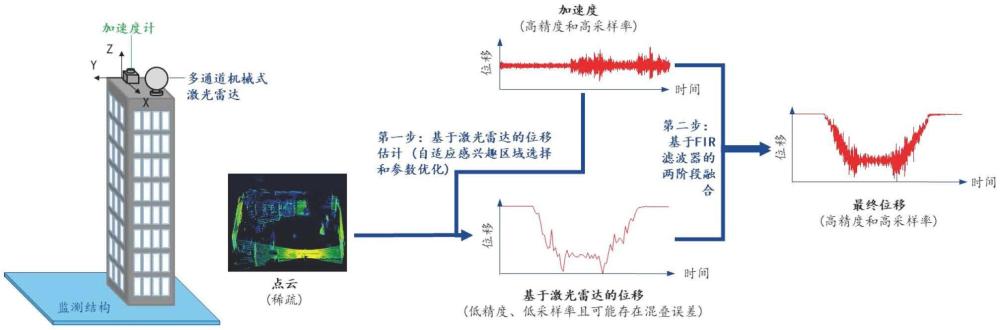
1、针对现有技术的不足,本发明提供了一种融合稀疏点云数据和加速度数据测量结构位移的方法,其可以通过使用结构的加速度测量数据自动选取激光雷达点云roi和优化三维点云到二维图像的相关转换参数来准确估计结构的位移,同时,基于激光雷达的低采样率位移和高采样率加速度用两阶段数据融合算法融合,便于以高采样率和高准确性估计结构的位移,消除时间混叠误差。
2、为实现上述目的,本发明提供如下技术方案:
3、一种融合稀疏点云数据和加速度数据测量结构位移的方法,其特征在于:在目标结构位移监测点上安装激光雷达和加速度计,其中,所述激光雷达以低采样率扫描建筑物周围,所述加速度计以高采样率测量结构加速度;基于激光雷达稀疏点云估计结构低采样率位移,并使用两阶段数据融合算法将基于激光雷达的低采样率位移与高采样率加速度融合,得到目标结构无时间混叠误差的高精度宽带位移。
4、优选的,所述基于激光雷达稀疏点云估计结构低采样率位移包括如下步骤:
5、步骤一、基于采集的初始短期激光雷达数据和加速度数据从激光雷达的360度视野(fov)中选取多个潜在点云roi;把三维点云roi转换为二维图像的相关参数;裁剪二维图像模版;选择最终roi和对应图像模版;
6、步骤二、将三维点云roi转换为二维图像以及基于零均值归一化互相关的模板匹配算法从二维图像中估计结构双向水平位移。
7、具体的,在步骤一中,所述“多个潜在点云roi”包括从采集的初始短期激光雷达点云第一帧中删除地面点云,将非地面点云聚类成多个簇,并基于点云特征在每个簇内分别选择一个点云roi。
8、进一步的,所述“在每个簇内分别选择一个点云roi”包括如下步骤:
9、步骤1、使用角度为的转动扇形窗口以1°的间隔遍历指定簇的点云,并分析对应扇形窗口内的点云特征,其中,fl和fa分别为激光雷达帧率和加速度计采样率;
10、所述“分析对应扇形窗口内的点云特征”包括将扇形窗口内各激光线束的点云转换为尺寸为m×q1的二维图像,其中,m为129像素,q1和点大小pt分别设置为:
11、
12、其中和表示扇形窗口内点云在x和y方向的范围,θr表示激光雷达的水平角分辨率;使用线段检测算法从二维图像中检测线段,计算所有线段在x和y方向的投影总长度(lx和ly),并使用以下三个方程之一计算点云评价指数(in);最大in对应扇形窗内的点云即为初选的簇内潜在点云roi;
13、;
14、步骤2、对初选的簇内潜在点云roi的线束选择;所述“对初选的簇内点云roi的线束选择”包括如下步骤:
15、步骤(1)、针对采集的初始短期激光雷达每一帧点云数据,将初选的簇内潜在点云roi内每一个线束的点云分别转换为m×q的图像,点大小为pt;基于预估的结构最大位移从第一张图像中裁剪出模板;
16、步骤(2)、使用模板匹配算法从不同线束的二维图像中估计得到多个位移(u1,…,un),对于每个线束,计算其位移相对于其他线束位移的均方根误差并求和ec,最后,选择ec低于阈值ec,t的线束用于位移估计;
17、其中,所述ec,t的值是通过求解下述最小化问题得到的,
18、
19、式中,n表示总激光线束数;p表示ec≤ec,t的线束数;和分别表示所有线束、ec≤ec,t的线束以及ec>ec,t的线束的平均ec值。
20、优选的,在步骤一中,所述“优化把三维点云roi转换为二维图像的相关参数”包括通过最小化高频范围内基于激光雷达和基于加速度的位移的差异来优选图像尺寸和点大小;
21、所述“优选图像和点大小”包括如下步骤:
22、步骤1、针对选取的点云roi,将图像尺寸定义为并通过优化mx值实现图像尺寸的优化,所述点云roi的水平范围为:xl<x<xu,yl<y<yu,而且xu-xl≤yu-yl;
23、步骤2、将mx和点大小初始设置为129个像素和0.1磅,独立计算基于激光雷达和加速度位移,并计算两者高频成分(>0.5hz)之间的均方根误差(rmse);从0.1磅到20磅逐渐变化点大小并重复步骤1,获得rmse与点大小曲线,选择与最小rmse对应的点大小作为最优点大小;将点大小设置为最优点大小,从129像素到500像素逐渐变化图像尺寸并重复步骤1,获得rmse与图像尺寸曲线;选择与最小rmse对应的图像尺寸作为最优图像尺寸。
24、优选的,在步骤一中,所述“裁剪二维图像模版”包括使用优化的图像尺寸和点大小,从激光雷达第一帧点云roi生成二维图像,并搜索图像内连通块;包含面积a大于阈值at的所有连通块的最小矩形即为模板位置;
25、所述阈值at通过求解下述最小化问题得到的,
26、
27、式中,nl和ql分别表示所有连通块和a≤at的连通块的数量;和分别表示所有连通块、a≤at的连通块和a>at的连通块的平均面积。
28、优选的,在步骤一中,所述“选择最终roi和对应图像模版”包括如下步骤:
29、步骤1、对每一簇内点云独立进行roi选择、参数优化和模版裁剪,得到多个roi和对应模板;
30、步骤2、基于模版匹配算法从上述roi得到短期的具有不同信噪比的多个位移;
31、步骤3、对于每个roi的位移,计算其相对于其他roi位移的均方根误差并求和(er),并选择er最小的roi作为最终的roi。
32、优选地,在步骤二中,所述“把三维点云roi转换为二维图像”包括通过忽略点云高度信息把三维点云roi投影为二维图像。
33、优选的,所述“两阶段数据融合算法”包括加速度辅助的基于激光雷达的位移的抗混叠和基于互补滤波的结构宽带位移估计两个阶段。
34、进一步的,所述“加速度辅助的基于激光雷达的位移的抗混叠”包括如下步骤:
35、步骤1、通过二重积分从加速度数据中估计有低频漂移的高采样位移,高通滤波提取频率高于基于激光雷达的位移的奈奎斯特频率的位移分量,并将其下采样到激光雷达帧率得到时间混叠误差;
36、步骤2、从基于激光雷达的位移中消除时间混叠误差,获得抗混叠的基于激光雷达的位移。
37、进一步的,所述“基于互补滤波的结构宽带位移估计”包括应用一对高通和低通滤波器从基于加速度的位移和抗混叠的基于激光雷达的位移中分别提取高频和低频位移分量,并将提取的低频和高频位移分量叠加得到最终结构位移,抗混叠的基于激光雷达的位移在低通滤波之前被上采样到加速度采样率。
38、与现有技术相比,本发明的有益效果是:
39、1、本发明将激光雷达和加速度计安装在待测量结构上,并且利用位于结构外部的自然目标作为激光雷达的目标。不需要用于安装激光雷达的固定支撑点,并且不需要预先测量自然目标的大小或激光雷达与目标之间的距离。
40、2、本发明通过融合加速度计和低成本机械式激光雷达,可以同时估计建筑结构的二维水平位移;此外,本发明可以自动从激光雷达的360度视野自动优选roi,无需人为干预roi选取,具有易实施性。
41、3、本发明将激光雷达的三维点云转换二维图像,并使用模板匹配算法可以从二维图像更好地估计位移;同时,通过融合初始加速度和点云数据,可以自适应优化点云-图像转换参数,保证基于激光雷达的位移的高精度。
42、4、本发明可以用慢转速确保密集点云的获取,提升基于激光雷达的位移的高精度。同时,两阶段数据融合算法融合高采样率加速度和低采样率基于激光雷达的位移,可以实现无混叠误差的结构宽带位移估计。
本文地址:https://www.jishuxx.com/zhuanli/20241015/314372.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。