一种无人机去雄系统及方法
- 国知局
- 2024-10-15 09:35:14
本发明涉及玉米制种用设备,尤其涉及一种无人机去雄系统,还涉及基于该系统的去雄方法。
背景技术:
1、高纯度的玉米杂交种子是保证玉米高产稳产的关键,而制种环节则是作为保证种子纯度的关键环节之一。在制种环节的去雄作业中,即去除母本的雄穗防止自交现象发生,是玉米制种的关键,也是获得高纯度高质量杂交种子的重要保证。
2、当前,我国玉米去雄作业主要有三种方式:人工去雄、地面机械去雄以及无人机去雄。人工去雄,指大量有工作经验的工人在玉米雄穗刚露头尚未开花散粉时拔出雄穗。受作业环境影响,该种去雄方式具有人工劳动强度大、时间成本高等缺陷。地面机械去雄则是采用带有去雄机构的地面机械进行去雄作业,相比较于人工去雄作业,可以降低农户的劳动强度。但地面去雄机械往往结构复杂、整机质量大,且机械重复性地进地(补去雄)作业易造成土壤压实且作物损伤率大。无人机去雄,即由无人机携带去雄机构进行去雄作业,这种方式既缓解了人力的消耗,又避免了土壤压实、作物损伤等问题。
3、现有去雄无人机的去雄作业流程一般为:先由前置无人机进行田间雄穗的定位,再由去雄无人机或地面去雄机械进行去雄作业,之后再由后置无人机进行复检,再由去雄无人机或地面去雄机械对遗漏或去雄不完全的雄穗进行补去雄,如此反复的进行雄穗定位-雄穗去除-雄穗复检-雄穗补去除作业。无人机去雄方式的多机多次作业方式,带来了作业管理复杂及作业成本高的问题。
技术实现思路
1、本发明所要解决的技术问题是提供一种能够通过一次作业,完成精准去雄、去雄质量检验、精准补去雄三个环节,工作效率高,使用成本降低且对作物损伤率大幅减小的无人机去雄系统。
2、为解决上述技术问题,本发明的技术方案是:一种无人机去雄系统,包括无人机模块,所述无人机模块上安装连接有智能控制模块、去雄模块和补去雄模块;
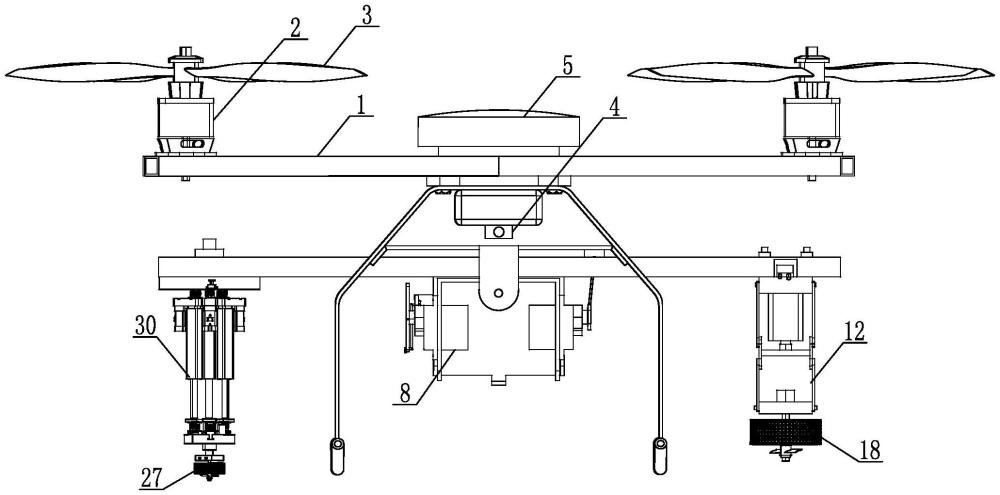
3、所述无人机模块包括主机架,所述主机架上布置安装有飞行电机,各所述飞行电机分别对应驱动连接有螺旋叶片,所述主机架上还布置安装有飞行信息采集装置;
4、所述智能控制模块包括安装于所述主机架下方的微控单元、飞行控制单元、去雄控制单元和数据采集单元,所述微控单元分别与所述飞行控制单元、所述去雄控制单元和所述数据采集单元连接设置,所述飞行控制单元与各所述飞行电机连接,所述数据采集单元与所述飞行信息采集装置、所述去雄模块、所述补去雄模块连接,所述去雄控制单元分别连接至所述去雄模块和所述补去雄模块;
5、所述去雄模块包括安装吊台,所述安装吊台上固定安装有去雄高度传感器,所述去雄高度传感器连接至所述数据采集单元,所述安装吊台的下方相对设有去雄支撑台,所述安装吊台与所述去雄支撑台之间连接有支撑台升降装置,所述去雄支撑台上安装有去雄操作装置和去雄收集装置,所述支撑台升降装置、所述去雄操作装置和所述去雄收集装置分别连接至所述去雄控制单元;
6、所述补去雄模块包括补去雄定平台,所述补去雄定平台上固定安装有补去雄高度传感器,所述补去雄高度传感器连接至所述数据采集单元,所述补去雄定平台的下方相对设有补去雄动平台,所述补去雄定平台与所述补去雄动平台之间连接有动平台调节装置,所述补去雄动平台上安装有补去雄操作装置和补去雄收集装置,所述动平台调节装置、所述补去雄操作装置和所述补去雄收集装置分别连接至所述去雄控制单元。
7、作为优选的技术方案,所述飞行信息采集装置包括安装于所述主机架上的陀螺仪、定位器和防抖相机,所述陀螺仪、所述定位器和所述防抖相机分别连接至所述数据采集单元。
8、作为优选的技术方案,所述支撑台升降装置包括剪叉式升降架,所述剪叉式升降架分别与所述安装吊台与所述去雄支撑台活动连接设置,所述剪叉式升降架传动连接有升降架电驱动装置,所述升降架电驱动装置固定在所述安装吊台上。
9、作为优选的技术方案,所述去雄操作装置包括贯穿所述去雄支撑台转动设置的去雄操作轴,所述去雄操作轴的顶端连接有固定于所述去雄支撑台上的去雄操作电机,所述去雄操作轴的下端安装有去雄螺旋刀片,所述去雄螺旋刀片上侧的所述去雄操作轴上设有去雄挡粉罩。
10、作为优选的技术方案,所述去雄收集装置包括固定于所述去雄支撑台上的花粉内吸筒,所述花粉内吸筒连接有去雄吸粉管,所述去雄吸粉管的端口设于所述去雄挡粉罩内。
11、作为优选的技术方案,所述动平台调节装置包括三个电动伸缩杆,所述电动伸缩杆的两端分别通过十字轴与所述补去雄定平台、所述补去雄动平台转动装配设置。
12、本发明还涉及一种无人机去雄系统使用的方法,用于玉米去雄作业,在所述无人机模块、所述智能控制模块、所述去雄模块和所述补去雄模块的配合下完成,包括,
13、sp1、开机后各模块自检并初始化,通过所述智能控制模块设定玉米去雄的作业区域参数;
14、sp2、通过所述无人机模块与所述智能控制模块的配合,获取玉米去雄作业区域的图像信息;
15、sp3、所述智能控制模块利用视觉技术对玉米去雄作业区域的图像信息进行分析处理并识别出作物行,将位于作业区域两侧边的作物行标记为边线行,位于两边线行之间的各作物行均标记为地中行,在所述智能控制模块内预设有与边线行对应的边线行去雄模式和与地中行对应的地中行去雄模式;
16、sp4、所述智能控制模块获取所述无人机模块当前的gps定位信息,控制其进入其中一边线行完成边线行对行,并进入边线行去雄模式实施边线行的去雄作业;
17、sp5、所述无人机模块行进至边线行的端头后掉头转行,进入与完成去雄的边线行相邻的地中行实施地中行对行,对行完成后进入地中行去雄模式实施地中行的去雄作业;
18、sp6、所述无人机模块行进至地中行的端头后掉头转行,循环实时地中行对行和地中行去雄模式直至所述智能控制模块检测到所述无人机模块进入另一边线行,转入边线行对行和边线行去雄模式完成另一边线行的补去雄作业。
19、作为优选的技术方案,一种无人机去雄系统使用的方法,包括,
20、sp1、开机后各模块自检并初始化,通过所述微控单元设定玉米去雄的作业区域参数;
21、sp2、利用防抖相机对玉米去雄的作业区域进行图像信息的采集,并通过所述数据采集单元将信息输送至所述微控单元;
22、sp3、所述微控单元利用视觉技术对玉米去雄作业区域的图像信息进行分析处理并识别出作物行,将位于作业区域两侧边的作物行标记为边线行,位于两边线行之间的各作物行均标记为地中行,在所述微控单元内预设有与边线行对应的边线行去雄模式和与地中行对应的地中行去雄模式;
23、sp4、利用定位器获取所述无人机模块当前的gps定位信息,控制其进入其中一边线行完成边线行对行,并进入边线行去雄模式实施边线行的去雄作业;
24、边线行对行为通过控制所述无人机模块,使所述去雄模块和所述补去雄模块均位于同一边线行内,并沿所述无人机模块的去雄作业行进方向呈前后分布,所述飞行控制单元控制所述防抖相机旋转,使所述防抖相机能够采集当前去雄任务实施位置后侧的玉米图像信息;
25、边线行去雄模式为利用所述无人机模块带动所述去雄模块和所述补去雄模块同步前行;在行进过程中所述微控单元通过去雄高度传感器获得玉米雄穗的高度信息,所述去雄控制单元根据玉米雄穗的高度信息控制所述支撑台升降装置动作,调整所述去雄支撑台的高度,间接调整去雄螺旋刀片的高度,并控制去雄操作电机启动,带动所述去雄螺旋刀片旋转将对应的玉米雄穗切除,完成精准去雄任务;同时所述微控单元利用视觉技术对所述防抖相机采集的当前去雄任务实施位置后侧的玉米图像信息进行分析处理,识别出去雄作业后遗漏的雄穗,并为遗漏的各雄穗对应标注待补去雄穗位置坐标后进行存储,完成去雄效果检查;
26、sp5、所述无人机模块行进至边线行的端头后掉头转行,进入与完成去雄的边线行相邻的地中行实施地中行对行,对行完成后进入地中行去雄模式实施地中行的去雄作业;
27、地中行对行为通过控制所述无人机模块,使所述去雄模块和所述补去雄模块位于相邻的两作物行内,并沿所述无人机模块的行进方向呈左右分布,在两作物行内其中一行为未实施过去雄任务的首次去雄作物行、另一行为已经实施过去雄任务的二次补去雄作物行,所述去雄模块对应首次去雄作物行、所述补去雄模块对应二次补去雄作物行;在所述无人机模块的行进过程中利用所述防抖相机实时采集当前去雄任务实施位置后侧的玉米图像信息;
28、地中行去雄模式为利用所述无人机模块带动所述去雄模块和所述补去雄模块同步前行;在行进过程中所述微控单元通过所述去雄高度传感器获得首次去雄作物行中玉米雄穗的高度信息,所述去雄控制单元根据玉米雄穗的高度信息控制所述支撑台升降装置动作,调整所述去雄支撑台的高度,间接调整去雄螺旋刀片的高度,并控制去雄操作电机启动,带动所述去雄螺旋刀片旋转将对应的玉米雄穗切除,完成精准去雄任务;同时所述微控单元利用视觉技术对所述防抖相机采集的当前去雄任务实施位置后侧的玉米图像信息进行分析处理,识别出去雄作业后遗漏的雄穗,并为遗漏的各雄穗对应标注待补去雄穗位置坐标后进行存储,完成去雄效果检查;在行进过程中所述微控单元实时获取所述无人机模块的位置信息,并与存储的待补去雄穗位置坐标进行对比判定当前是否有补去雄任务,判断为有时,所述微控单元通过补去雄高度传感器获得待补去雄穗位置坐标对应的玉米雄穗的高度信息,所述去雄控制单元根据待补去雄穗的高度信息控制各电动伸缩杆动作,并在所述电动伸缩杆与十字轴的配合下,调整所述补去雄动平台的高度及角度,间接调整所述补去雄操作装置的高度及角度将对应的玉米雄穗切除,完成精准补去雄任务;
29、sp6、所述无人机模块行进至地中行的端头后掉头转行,循环实时地中行对行和地中行去雄模式直至所述智能控制模块检测到所述无人机模块进入另一边线行,转入边线行对行和边线行去雄模式完成另一边线行的补去雄作业。
30、作为对上述技术方案的改进,还包括,
31、sp7、在边线行去雄模式、地中行去雄模式中,所述去雄控制单元控制实施去雄作业时,同时控制对应的所述去雄收集装置、所述补去雄收集装置启动,对去雄过程中产生的花粉进行收集。
32、由于采用了上述技术方案,本发明具有以下有益效果:在系统实施去雄任务的同时,还可以完成遗漏雄穗的检测定位并进行补去雄,实现了从作业区域的一侧行进至另一侧即可完成全区的去雄任务,无需二次进地能耗降低,与作物接触大幅减少,从而大幅度地降低了作物的损伤率,且人为干预少,缓解了人力的消耗,整个过程中也不与土壤接触,消除了传统方法中土壤被压实的缺陷,保证了作物的正常生长。
本文地址:https://www.jishuxx.com/zhuanli/20241015/314628.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。