一种基于多激励源和多传递路径的电磁与机械振动耦合分析方法
- 国知局
- 2024-10-15 09:37:21
本发明属于电磁分析和振动工程,具体涉及一种基于多激励源和多传递路径的电磁与机械振动耦合分析方法。
背景技术:
1、永磁同步电机具有优异的性能表现,因而被广泛应用于电动汽车、工业生产和船舶推进等领域,随着相关设备对舒适度、精度和隐蔽性等需求的不断提高,永磁同步电机振动噪声水平面临的挑战也越来越严苛。因此永磁电机的电磁振动与减振降噪已经成为设计过程中重要一环,其中多激励源-多传递路径的耦合振动分析是永磁电机振动研究基础。
2、目前,国内外的大部分研究都还是把电磁激励和机械激励分开研究,单独加载到电机上计算其振动响应,这种处理降低了研究难度,对电磁和机械无耦合的情况是可以接受的。但是这种方法忽略了电磁与机械激励的耦合性,因此当转子偏心或施加负载的时候,其计算结果相差甚远。因此研究和建立一种能够适用多激励源多传递路径的振动耦合分析方法具有十分重要的意义。
技术实现思路
1、本发明的目的在于提供一种基于多激励源和多传递路径的电磁与机械振动耦合分析方法。
2、一种基于多激励源和多传递路径的电磁与机械振动耦合分析方法,包括以下步骤:
3、步骤1:分析电磁激励中空载气隙磁密,获取空载工况定子开槽电机模型中的气隙磁密;
4、步骤2:分析电磁激励中电枢反应气隙磁密,获取全部线圈产生的电枢反应气隙磁密;
5、步骤3:分析电磁激励中由于svpwm调制产生的高频气隙磁密,获取定子开槽下高频电流谐波产生的气隙磁密;
6、步骤4:将空载气隙磁密、电枢反应气隙磁密和高频气隙磁密相叠加,得到负载工况气隙总磁密,并计算电磁激励中负载电磁力;
7、步骤5:计算由于转子动不平衡和不对中产生的不平衡磁拉力;
8、步骤6:获取滚动轴承的机械激励与负载设备的流体激励、啮合激励和空气流动激励;
9、步骤7:建立永磁电机的结构有限元模型,对电机进行模态分析并利用模态试验对有限元模型进行修正,通过仿真计算得到定子—机壳—机脚的传递函数和转子—轴承—端盖—机壳—机脚的传递函数;
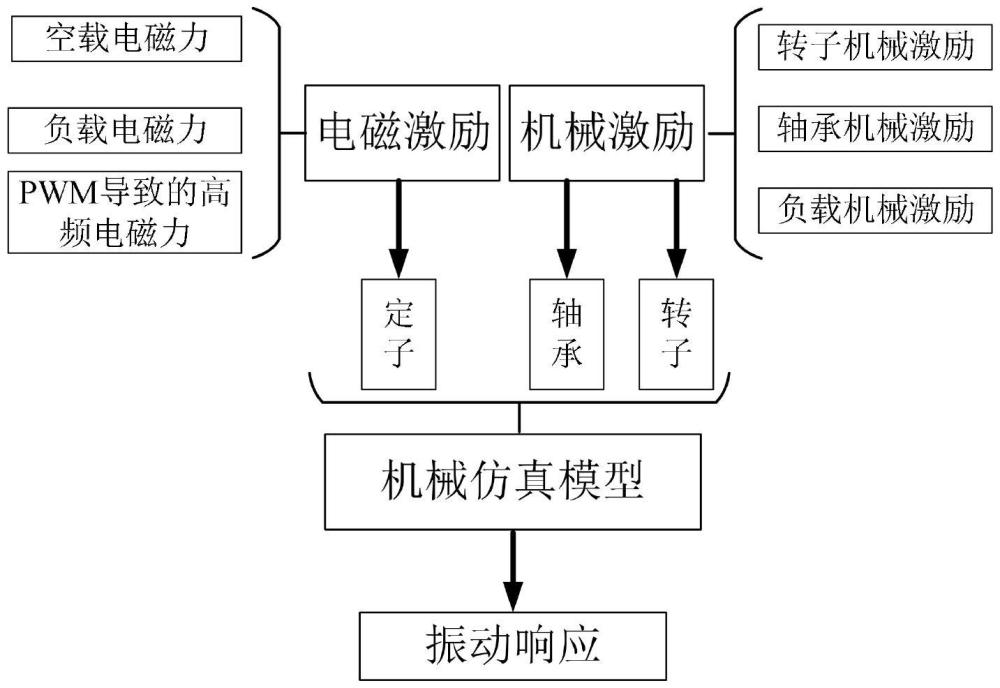
10、步骤8:在永磁电机的结构有限元模型中,将电磁激励中负载电磁力施加到定子内表面和转子外表面,将由于转子动不平衡和不对中产生的不平衡磁拉力施加到转子,将滚动轴承的机械激励施加到轴承座,将流体激励、啮合激励和空气流动激励施加到电机输出端的转轴,获取振动响应结果。
11、进一步地,所述步骤1具体为:
12、极坐标系下,空载工况定子无槽电磁模型气隙中径向磁感应强度bradial(r,θ,t)和切向磁感应强度btangential(r,θ,t)为:
13、
14、其中,r表示磁场半径;θ表示磁场角度;t表示时间;n表示时间谐次;p表示永磁电机极对数;和表示只与半径r有关的系数;ωe表示机械频率;
15、复相对气隙磁导函数λ为:
16、λ=λa+jλb
17、其中,λa、λb分别为λ的实部与虚部,j为虚数单位;
18、基于柯西-黎曼条件,经过保角映射后两个电磁模型中电磁场场量的关系为:
19、
20、其中,是空载工况定子开槽电机模型中的磁密分布,bs_rad(r,θ,t)和bs_tan(r,θ,t)分别表示空载工况定子开槽电机模型中的径向气隙磁密和切向气隙磁密。
21、进一步地,所述步骤2具体为:
22、电枢反应气隙磁密是通过将每个线圈产生的磁密进行相移和叠加获得的,同时需要注意线圈中电流的方向以及线圈所属的相位,每个线圈的位置和方向通过绕组星形矢量图来确定,全部线圈产生的电枢反应气隙磁密为:
23、
24、其中,basr(r,θ,t)为全部线圈产生的电枢反应气隙磁密径向分量;basθ(r,θ,t)为全部线圈产生的电枢反应气隙磁密切向分量;i(t)表示瞬时相电流;mp是相数;若线圈中电流为正向,则sgni取1;若线圈中电流为负向,则sgni取-1;αi是电流所在线圈的机械角度;nc表示每个线圈匝数;qs表示定子槽数;na表示傅里叶系数的最大阶次;basrk(r)和basθk(r)表示只与半径r有关的系数。
25、进一步地,所述步骤3具体为:
26、高频电流谐波的三相电流解析模型为:
27、
28、其中,iab为电流谐波幅值;fs为开关频率;为电流谐波相位;fe表示基波电流频率;a、b表示奇偶性相异的自然数;
29、定子开槽下高频电流谐波产生的径向和切向气隙磁密分别为:
30、
31、其中,和表示只与半径r有关的系数。
32、进一步地,所述步骤4具体为:
33、将空载气隙磁密、电枢反应气隙磁密和高频气隙磁密相叠加,得到负载工况气隙总磁密的径向分量br(r,θ,t)与切向分量bθ(r,θ,t)为:
34、br(r,θ,t)=bs_rad(r,θ,t)+basr(r,θ,t)+bsr_pwm(r,θ,t)
35、bθ(r,θ,t)=bs_tan(r,θ,t)+basθ(r,θ,t)+bsθ_pwm(r,θ,t)
36、基于maxwell应力张量法计算负载电磁力的径向分量pr(r,θ,t)与切向分量pθ(r,θ,t):
37、
38、其中,μ0为真空磁导率。
39、进一步地,所述步骤5具体为:
40、计算由于转子动不平衡和不对中产生的不平衡磁拉力;
41、
42、其中,r0为电机气隙半径,l为电机轴向长度。
43、进一步地,所述步骤6中获取滚动轴承的机械激励的方法具体为:
44、根据滚动轴承的机械激励滚动轴承的振机理和信号特征,将滚动轴承正常运行过程中的特征频率分为
45、(1)内圈旋转频率
46、
47、(2)保持架旋转频率
48、
49、(3)滚动体自转频率
50、
51、(4)保持架通过内圈频率
52、
53、(5)滚动体通过内圈频率
54、
55、(6)滚动体通过外圈频率
56、
57、其中,n是轴的转速,单位为r/min;α为接触角;d为节径;d为滚动体直径;z为滚动体个数;根据滚动轴承的频率特征合成滚动轴承的机械激励时域函数fr。
58、进一步地,所述步骤8中根据激励作用位置,在永磁电机的结构有限元模型中将pr和pθ施加到定子内表面和转子外表面,将由于转子动不平衡和不对中产生的不平衡磁拉力fx和fy施加到转子,将滚动轴承的机械激励fr施加到轴承座,将流体激励fliquid、啮合激励fengage和空气流动激励fair施加到电机输出端的转轴,获取振动响应结果:
59、x=(pr+pθ)×[h1(s)+h2(s)]+(fx+fy)×h2(s)+fr×h2(s)+(fliquid+fengage+fair)×h2(s)
60、其中,h1(s)为定子—机壳—机脚的传递函数;h2(s)为转子—轴承—端盖—机壳—机脚的传递函数。
61、本发明的有益效果在于:
62、本发明通过分析不同的电磁激励、机械激励和传递路径计算了多激励源-多传递路径下的耦合振动响应。本发明把包括负载激励、svpwm高频激励、转子不对中激励和轴承激励等多个电磁激励和机械激励考虑在内,能够为不同永磁电机设计方案的振动响应分析提供参考,为永磁同步电机减振降噪优化设计提供新方案。利用本发明计算多激励源-多传递路径下的耦合振动响应是准确高效的,可以快速研究永磁同步电机驱动负载设备的全频段振动响应分布和特性,进而可以用于指导低噪声永磁同步电机系统的实际设计生产。
本文地址:https://www.jishuxx.com/zhuanli/20241015/314757.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表