拉斗铲作业任务的智能化记录方法及装置与流程
- 国知局
- 2024-10-15 09:42:02
本发明涉及拉斗铲作业,具体而言,涉及一种拉斗铲作业任务的智能化记录方法及装置。
背景技术:
1、拉斗铲倒堆工艺作为露天采矿的先进技术之一,因其工艺系统作业效率高、生产成本低等优点,目前已成为美国、澳大利亚等诸多发达国家露天矿山的主流开采工艺。其中,作为工艺系统的关键工序,拉斗铲剥离作业可以将采掘、运输、排土三个露天矿山的生产环节进行了高度整合,由此为露天矿山生产节省了大量的生产设备和人力资源。此外,拉斗铲在作业过程中采用电力驱动替代传统燃油,有效减少了环境污染,为露天矿山向绿色可持续发展的转型做出了积极贡献。
2、作为关键性剥离设备,拉斗铲在岩石物料的剥离过程中,承担了多样化的生产剥离任务,而不同剥离任务的量化分析对后续优化提升拉斗铲的作业效率至关重要。然而,由于拉斗铲直至2007年才被引进国内露天矿山,其信息化程度具有一定的局限,这限制了对设备作业状态与内容的有效更新与记录,进而对设备作业的量化评估及生产效率的科学评价造成了显著影响。
3、当前,随着露天矿山智能化升级与改造的发展趋势,生产过程的信息化、生产施工的精准化、生产管理的精细化越来越受到矿山的高度重视。所以,拉斗铲的作业任务的有效统计不仅能推动生产管理的精细化和信息化进程,还为设备作业的量化评估和生产效率的科学评价提供了坚实的基础。然而,目前拉斗铲作业任务的统计主要依赖于人工分类和记录,这不仅加剧了操作人员的劳动强度,而且在统计过程中容易分散操作人员的注意力,从而可能对设备的正常运行造成安全风险,由此进一步可能导致不必要的生产经济损失。
4、针对上述相关技术中拉斗铲作业任务的统计主要依赖于人工分类和记录,容易因注意力不集中、劳动强度高等导致记录失误,影响设备正常运行的问题,目前尚未提出有效的解决方案。
技术实现思路
1、本发明实施例提供了一种拉斗铲作业任务的智能化记录方法及装置,以至少解决相关技术中拉斗铲作业任务的统计主要依赖于人工分类和记录,容易因注意力不集中、劳动强度高等导致记录失误,影响设备正常运行的技术问题。
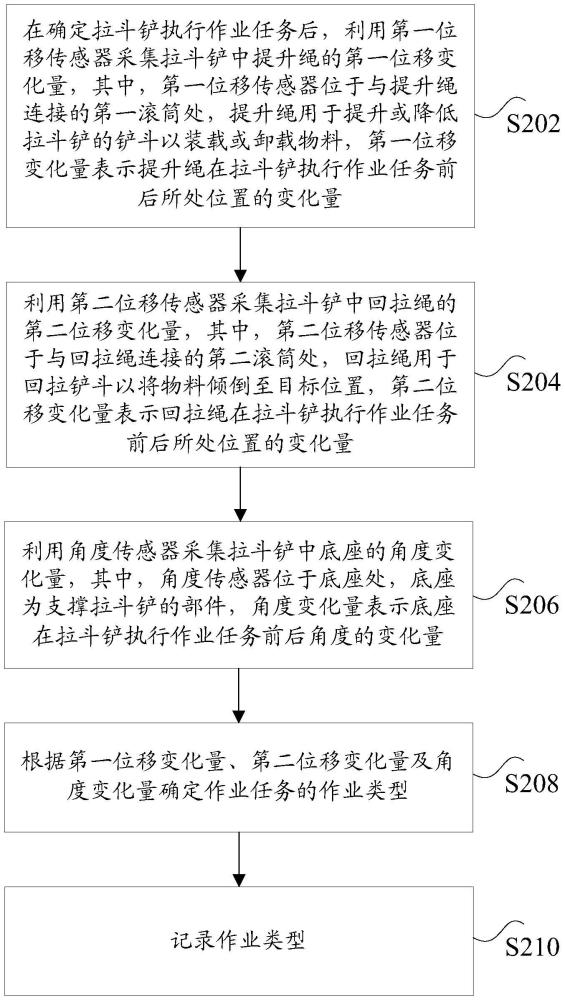
2、根据本发明实施例的一个方面,提供了一种拉斗铲作业任务的智能化记录方法,包括:在确定拉斗铲执行所述作业任务后,利用第一位移传感器采集所述拉斗铲中提升绳的第一位移变化量,其中,所述第一位移传感器位于与所述提升绳连接的第一滚筒处,所述提升绳用于提升或降低所述拉斗铲的铲斗以装载或卸载物料,所述第一位移变化量表示所述提升绳在所述拉斗铲执行所述作业任务前后所处位置的变化量;利用第二位移传感器采集所述拉斗铲中回拉绳的第二位移变化量,其中,所述第二位移传感器位于与所述回拉绳连接的第二滚筒处,所述回拉绳用于回拉所述铲斗以将所述物料倾倒至目标位置,所述第二位移变化量表示所述回拉绳在所述拉斗铲执行所述作业任务前后所处位置的变化量;利用角度传感器采集所述拉斗铲中底座的角度变化量,其中,所述角度传感器位于所述底座处,所述底座为支撑所述拉斗铲的部件,所述角度变化量表示所述底座在所述拉斗铲执行所述作业任务前后角度的变化量;根据所述第一位移变化量、所述第二位移变化量及所述角度变化量确定所述作业任务的任务类型;记录所述任务类型。
3、可选地,根据所述第一位移变化量、所述第二位移变化量及所述角度变化量确定所述作业任务的任务类型,包括:在所述第二位移变化量和所述角度变化量均为零,且所述第一位移变化量处于第一提升位移阈值范围内的情况下,确定所述任务类型为刷帮作业,其中,所述第一提升位移阈值范围为不小于第一提升位移阈值且不大于第二提升位移阈值的范围,所述第一提升位移阈值小于所述第二提升位移阈值;在所述第一位移变化量、所述第二位移变化量及所述角度变化量均不为零的情况下,根据所述第一位移变化量、所述第二位移变化量及所述角度变化量分别所处的阈值范围确定所述任务类型。
4、可选地,根据所述第一位移变化量、所述第二位移变化量及所述角度变化量分别所处的阈值范围确定所述任务类型,包括:在所述第一位移变化量处于第二提升位移阈值范围内、所述第二位移变化量处于第一回拉位移阈值范围内且所述角度变化量处于第一角度阈值范围内的情况下,确定所述任务类型为挖掘超前沟,其中,所述第二提升位移阈值范围为不小于第三提升位移阈值且不大于第四提升位移阈值的范围,所述第三提升位移阈值小于所述第一提升位移阈值,所述第四提升位移阈值大于所述第二提升位移阈值,所述第一回拉位移阈值范围为不小于第一回拉位移阈值且不大于第二回拉位移阈值的范围,所述第一回拉位移阈值小于所述第二回拉位移阈值,所述第一角度阈值范围为不小于第一角度阈值且不大于第二角度阈值的范围,所述第一角度阈值小于所述第二角度阈值;在所述第一位移变化量处于第三提升位移阈值范围内、所述第二位移变化量处于第二回拉位移阈值范围内且所述角度变化量处于第二角度阈值范围内的情况下,确定所述任务类型为挖掘站立台阶,其中,所述第三提升位移阈值范围为不小于第五提升位移阈值且不大于所述第三提升位移阈值的范围,所述第五提升位移阈值小于所述第三提升位移阈值,所述第二回拉位移阈值范围为不小于第三回拉位移阈值且不大于第四回拉位移阈值的范围,所述第四回拉位移阈值小于所述第一回拉位移阈值,所述第三回拉位移阈值小于所述第四回拉位移阈值,所述第二角度阈值范围为不小于第三角度阈值且不大于第一角度阈值的范围,所述第三角度阈值小于所述第一角度阈值;在所述第一位移变化量处于第四提升位移阈值范围内、所述第二位移变化量处于第三回拉位移阈值范围内且所述角度变化量处于第三角度阈值范围内的情况下,确定所述任务类型为挖掘煤沟,其中,所述第四提升位移阈值范围为不小于第六提升位移阈值且不大于第七提升位移阈值的范围,所述第六提升位移阈值大于所述第一提升位移阈值且小于所述第二提升位移阈值,所述第七提升位移阈值大于所述第四提升位移阈值,所述第三回拉位移阈值范围为不小于所述第三回拉位移阈值且不大于第五回拉位移阈值的范围,所述第五回拉位移阈值大于所述第三回拉位移阈值且小于所述第四回拉位移阈值,所述第三角度阈值范围为不小于所述第三角度阈值且不大于第四角度阈值的范围,所述第四角度阈值大于所述第三角度阈值且小于所述第一角度阈值。
5、可选地,该拉斗铲作业任务的智能化记录方法还包括:分别根据所述第一位移变化量、所述第二位移变化量及所述角度变化量确定所述提升绳、所述回拉绳及所述底座的变化方向,其中,所述变化方向包括:所述提升绳的第一变化方向、所述回拉绳的第二变化方向及所述底座的第三变化方向;根据所述变化方向确定提升位移阈值、回拉位移阈值及角度阈值的取值方向,其中,所述提升位移阈值用于确定所述第一位移变化量的提升位移阈值范围,所述回拉位移阈值用于确定所述第二位移变化量的回拉位移阈值范围,所述角度阈值用于确定所述角度变化量的角度阈值范围,所述提升位移阈值包括:第一提升位移阈值、第二提升位移阈值、第三提升位移阈值、第四提升位移阈值、第五提升位移阈值、第六提升位移阈值、第七提升位移阈值,所述回拉位移阈值包括:第一回拉位移阈值、第二回拉位移阈值、第三回拉位移阈值、第四回拉位移阈值、第五回拉位移阈值,所述角度阈值包括:第一角度阈值、第二角度阈值、第三角度阈值、第四角度阈值,所述提升位移阈值范围包括:第一提升位移阈值范围、第二提升位移阈值范围、第三提升位移阈值范围、第四提升位移阈值范围,所述回拉位移阈值范围包括:第一回拉位移阈值范围、第二回拉位移阈值范围、第三回拉位移阈值范围,所述角度阈值范围:第一角度阈值范围、第二角度阈值范围、第三角度阈值范围,所述取值方向包括:所述提升绳的第一取值方向、所述回拉绳的第二取值方向及所述底座的第三取值方向。
6、可选地,分别根据所述第一位移变化量、所述第二位移变化量及所述角度变化量确定所述提升绳、所述回拉绳及所述底座的变化方向,包括:在所述第一位移变化量为正值的情况下,确定所述提升绳的所述第一变化方向为提升,在所述第一位移变化量为负值的情况下,确定所述提升绳的所述第一变化方向为回收;在所述第二位移变化量为所述正值的情况下,确定所述回拉绳的所述第二变化方向为所述提升,在所述第二位移变化量为所述负值的情况下,确定所述回拉绳的所述第二变化方向为所述回收;在所述角度变化量为所述正值的情况下,确定所述底座的所述第三变化方向为顺时针旋转,在所述角度变化量为所述负值的情况下,确定所述底座的所述第三变化方向为逆时针旋转。
7、可选地,根据所述变化方向确定提升位移阈值、回拉位移阈值及角度阈值的取值方向,包括:在所述第一变化方向为提升的情况下,确定所述提升位移阈值的所述第一取值方向为正值,在所述第一变化方向为回收的情况下,确定所述提升位移阈值的所述第一取值方向为负值;在所述第二变化方向为所述提升的情况下,确定所述回拉位移阈值的所述第二取值方向为所述正值,在所述第二变化方向为所述回收的情况下,确定所述回拉位移阈值的所述第二取值方向为所述负值;在所述第三变化方向为顺时针旋转的情况下,确定所述角度阈值的所述第三取值方向为所述正值,在所述第三变化方向为逆时针旋转的情况下,确定所述角度阈值的所述第三取值方向为所述负值。
8、根据本发明实施例的另一方面,还提供了一种拉斗铲作业任务的智能化记录装置,包括:第一采集单元,用于在确定拉斗铲执行所述作业任务后,利用第一位移传感器采集所述拉斗铲中提升绳的第一位移变化量,其中,所述第一位移传感器位于与所述提升绳连接的第一滚筒处,所述提升绳用于提升或降低所述拉斗铲的铲斗以装载或卸载物料,所述第一位移变化量表示所述提升绳在所述拉斗铲执行所述作业任务前后所处位置的变化量;第二采集单元,用于利用第二位移传感器采集所述拉斗铲中回拉绳的第二位移变化量,其中,所述第二位移传感器位于与所述回拉绳连接的第二滚筒处,所述回拉绳用于回拉所述铲斗以将所述物料倾倒至目标位置,所述第二位移变化量表示所述回拉绳在所述拉斗铲执行所述作业任务前后所处位置的变化量;第三采集单元,用于利用角度传感器采集所述拉斗铲中底座的角度变化量,其中,所述角度传感器位于所述底座处,所述底座为支撑所述拉斗铲的部件,所述角度变化量表示所述底座在所述拉斗铲执行所述作业任务前后角度的变化量;第一确定单元,用于根据所述第一位移变化量、所述第二位移变化量及所述角度变化量确定所述作业任务的任务类型;记录单元,用于记录所述任务类型。
9、可选地,所述第一确定单元,包括:第一确定模块,用于在所述第二位移变化量和所述角度变化量均为零,且所述第一位移变化量处于第一提升位移阈值范围内的情况下,确定所述任务类型为刷帮作业,其中,所述第一提升位移阈值范围为不小于第一提升位移阈值且不大于第二提升位移阈值的范围,所述第一提升位移阈值小于所述第二提升位移阈值;第二确定模块,用于在所述第一位移变化量、所述第二位移变化量及所述角度变化量均不为零的情况下,根据所述第一位移变化量、所述第二位移变化量及所述角度变化量分别所处的阈值范围确定所述任务类型。
10、可选地,所述第二确定模块,包括:第一确定子模块,用于在所述第一位移变化量处于第二提升位移阈值范围内、所述第二位移变化量处于第一回拉位移阈值范围内且所述角度变化量处于第一角度阈值范围内的情况下,确定所述任务类型为挖掘超前沟,其中,所述第二提升位移阈值范围为不小于第三提升位移阈值且不大于第四提升位移阈值的范围,所述第三提升位移阈值小于所述第一提升位移阈值,所述第四提升位移阈值大于所述第二提升位移阈值,所述第一回拉位移阈值范围为不小于第一回拉位移阈值且不大于第二回拉位移阈值的范围,所述第一回拉位移阈值小于所述第二回拉位移阈值,所述第一角度阈值范围为不小于第一角度阈值且不大于第二角度阈值的范围,所述第一角度阈值小于所述第二角度阈值;第二确定子模块,用于在所述第一位移变化量处于第三提升位移阈值范围内、所述第二位移变化量处于第二回拉位移阈值范围内且所述角度变化量处于第二角度阈值范围内的情况下,确定所述任务类型为挖掘站立台阶,其中,所述第三提升位移阈值范围为不小于第五提升位移阈值且不大于所述第三提升位移阈值的范围,所述第五提升位移阈值小于所述第三提升位移阈值,所述第二回拉位移阈值范围为不小于第三回拉位移阈值且不大于第四回拉位移阈值的范围,所述第四回拉位移阈值小于所述第一回拉位移阈值,所述第三回拉位移阈值小于所述第四回拉位移阈值,所述第二角度阈值范围为不小于第三角度阈值且不大于第一角度阈值的范围,所述第三角度阈值小于所述第一角度阈值;第三确定子模块,用于在所述第一位移变化量处于第四提升位移阈值范围内、所述第二位移变化量处于第三回拉位移阈值范围内且所述角度变化量处于第三角度阈值范围内的情况下,确定所述任务类型为挖掘煤沟,其中,所述第四提升位移阈值范围为不小于第六提升位移阈值且不大于第七提升位移阈值的范围,所述第六提升位移阈值大于所述第一提升位移阈值且小于所述第二提升位移阈值,所述第七提升位移阈值大于所述第四提升位移阈值,所述第三回拉位移阈值范围为不小于所述第三回拉位移阈值且不大于第五回拉位移阈值的范围,所述第五回拉位移阈值大于所述第三回拉位移阈值且小于所述第四回拉位移阈值,所述第三角度阈值范围为不小于所述第三角度阈值且不大于第四角度阈值的范围,所述第四角度阈值大于所述第三角度阈值且小于所述第一角度阈值。
11、可选地,该拉斗铲作业任务的智能化记录装置还包括:第二确定单元,用于分别根据所述第一位移变化量、所述第二位移变化量及所述角度变化量确定所述提升绳、所述回拉绳及所述底座的变化方向,其中,所述变化方向包括:所述提升绳的第一变化方向、所述回拉绳的第二变化方向及所述底座的第三变化方向;第三确定单元,用于根据所述变化方向确定提升位移阈值、回拉位移阈值及角度阈值的取值方向,其中,所述提升位移阈值用于确定所述第一位移变化量的提升位移阈值范围,所述回拉位移阈值用于确定所述第二位移变化量的回拉位移阈值范围,所述角度阈值用于确定所述角度变化量的角度阈值范围,所述提升位移阈值包括:第一提升位移阈值、第二提升位移阈值、第三提升位移阈值、第四提升位移阈值、第五提升位移阈值、第六提升位移阈值、第七提升位移阈值,所述回拉位移阈值包括:第一回拉位移阈值、第二回拉位移阈值、第三回拉位移阈值、第四回拉位移阈值、第五回拉位移阈值,所述角度阈值包括:第一角度阈值、第二角度阈值、第三角度阈值、第四角度阈值,所述提升位移阈值范围包括:第一提升位移阈值范围、第二提升位移阈值范围、第三提升位移阈值范围、第四提升位移阈值范围,所述回拉位移阈值范围包括:第一回拉位移阈值范围、第二回拉位移阈值范围、第三回拉位移阈值范围,所述角度阈值范围:第一角度阈值范围、第二角度阈值范围、第三角度阈值范围,所述取值方向包括:所述提升绳的第一取值方向、所述回拉绳的第二取值方向及所述底座的第三取值方向。
12、可选地,所述第二确定单元,包括:第三确定模块,用于在所述第一位移变化量为正值的情况下,确定所述提升绳的所述第一变化方向为提升,在所述第一位移变化量为负值的情况下,确定所述提升绳的所述第一变化方向为回收;第四确定模块,用于在所述第二位移变化量为所述正值的情况下,确定所述回拉绳的所述第二变化方向为所述提升,在所述第二位移变化量为所述负值的情况下,确定所述回拉绳的所述第二变化方向为所述回收;第五确定模块,用于在所述角度变化量为所述正值的情况下,确定所述底座的所述第三变化方向为顺时针旋转,在所述角度变化量为所述负值的情况下,确定所述底座的所述第三变化方向为逆时针旋转。
13、可选地,所述第三确定单元,包括:第六确定模块,用于在所述第一变化方向为提升的情况下,确定所述提升位移阈值的所述第一取值方向为正值,在所述第一变化方向为回收的情况下,确定所述提升位移阈值的所述第一取值方向为负值;第七确定模块,用于在所述第二变化方向为所述提升的情况下,确定所述回拉位移阈值的所述第二取值方向为所述正值,在所述第二变化方向为所述回收的情况下,确定所述回拉位移阈值的所述第二取值方向为所述负值;第八确定模块,用于在所述第三变化方向为顺时针旋转的情况下,确定所述角度阈值的所述第三取值方向为所述正值,在所述第三变化方向为逆时针旋转的情况下,确定所述角度阈值的所述第三取值方向为所述负值。
14、根据本发明实施例的另一方面,还提供了一种拉斗铲作业任务的智能化记录系统,所述拉斗铲作业任务的智能化记录系统使用上述任一种所述的拉斗铲作业任务的智能化记录方法。
15、根据本发明实施例的另一方面,还提供了一种计算机可读存储介质,所述计算机可读存储介质包括存储的程序,其中,所述程序执行上述任意一种所述的拉斗铲作业任务的智能化记录方法。
16、根据本发明实施例的另一方面,还提供了一种处理器,所述处理器用于运行程序,其中,所述程序运行时执行上述任意一种所述的拉斗铲作业任务的智能化记录方法。
17、根据本发明实施例的另一方面,还提供了一种计算机程序产品,包括计算机指令,所述计算机指令被处理器执行时执行上述任意一种所述的拉斗铲作业任务的智能化记录方法。
18、在本发明实施例中,在确定拉斗铲执行作业任务后,利用第一位移传感器采集拉斗铲中提升绳的第一位移变化量,其中,第一位移传感器位于与提升绳连接的第一滚筒处,提升绳用于提升或降低拉斗铲的铲斗以装载或卸载物料,第一位移变化量表示提升绳在拉斗铲执行作业任务前后所处位置的变化量;利用第二位移传感器采集拉斗铲中回拉绳的第二位移变化量,其中,第二位移传感器位于与回拉绳连接的第二滚筒处,回拉绳用于回拉铲斗以将物料倾倒至目标位置,第二位移变化量表示回拉绳在拉斗铲执行作业任务前后所处位置的变化量;利用角度传感器采集拉斗铲中底座的角度变化量,其中,角度传感器位于底座处,底座为支撑拉斗铲的部件,角度变化量表示底座在拉斗铲执行作业任务前后角度的变化量;根据第一位移变化量、第二位移变化量及角度变化量确定作业任务的任务类型;记录任务类型。通过以上技术方案,达到了通过每次提升绳的位移变化量、回拉绳的位移变化量及设备底座角度的变化量自动反推拉斗铲所执行作业任务的任务类型并进行记录的目的,实现了智能化采集相关信息并自动对所执行作业任务的任务类型进行分析和记录的技术效果,进而解决了相关技术中拉斗铲作业任务的统计主要依赖于人工分类和记录,容易因注意力不集中、劳动强度高等导致记录失误,影响设备正常运行的技术问题。
本文地址:https://www.jishuxx.com/zhuanli/20241015/315066.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表