一种针对场景理解的在线升力补偿方法
- 国知局
- 2024-10-15 09:50:54
本发明属于飞行机器人控制领域,具体涉及一种针对场景理解的在线升力补偿方法,适用于需要处于大机动飞行或长时间飞行场景且需要实现稳定安全控制的无人机控制系统。
背景技术:
1、近年来,以多旋翼作为驱动机构的小型无人机在灾害预警、地质勘察、应急救援等国防、电力、航拍等领域得到了深入广泛的应用。无人机处于大机动飞行或长时间飞行等类似场景时,由于机载电池电压降低,其各个电机实际产生升力难以达到期望值,致使旋翼无人机安全性和稳定性发生显著降低。
2、无人机抗干扰相关的控制理论已较为成熟,目前针对于电池电压降低所导致的干扰影响已经得到实验验证的控制方法很少。中国专利申请cn202010249028.4提出了一种用于小型旋转翼纯电动无人机的锂电池状态估计方法,但未涉及电池状态变化从而导致的无人机升力变化影响,中国专利申请cn202211373979.8提出了一种基于升力反馈动力装置的旋翼无人机控制方法,但需要在硬件层面借助力传感器进行升力实时测量,增加了无人机负重。其余也有部分科研工作者从控制算法领域研究了风、雨等类型的干扰对旋翼无人机的影响或从旋翼无人机电池长续航设计方面做出了贡献,但是这些工作均未能针对电池电压降低影响设计相应的旋翼无人机抗干扰控制律。
技术实现思路
1、为克服现有研究内容及方法的不足,对于以多旋翼无人机为基础的飞行机器人系统,本发明提供一种针对场景理解的在线升力补偿方法,解决无人机在执行大机动飞行或长时间飞行任务时,电池电压降低导致的升力不足以及轨迹飞行精度降低的问题。本发明首先针对无人机电池电压降低所产生部分影响进行理论分析;然后在此基础上,结合无人机的基本动力学模型构建考虑电池电压降低影响的无人机动力学模型。其次在无人机控制方面,利用干扰观测器、pid控制相关理念与经验,设计与无人机姿态相解耦的电压降低观测器且合理地选取观测器的参数,并在此基础上设计针对电压降低的抗干扰控制律。
2、本发明所提供的方案能够在软件层面借助控制算法实现无人机升力损失的实时补偿,并通过借助升力损失模型实现无人机升力损失估计值与无人机状态之间的解耦合。在不增加无人机负载的情况下保证旋翼无人机在电池电压降低情况下的高精度飞行与稳定,以完成各类作业任务。
3、为达到上述目的,本发明采用如下技术方案:
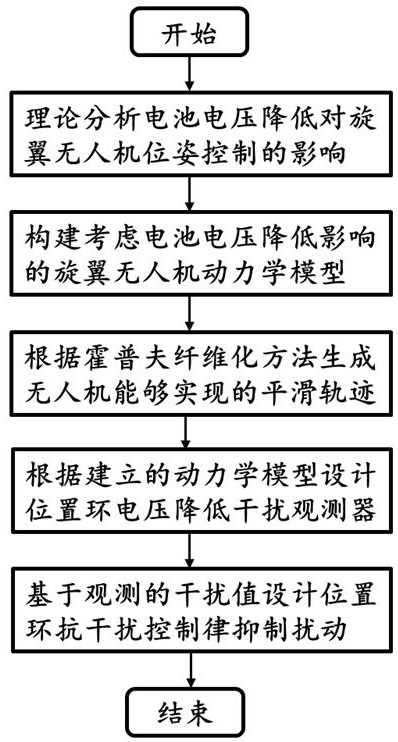
4、一种针对场景理解的在线升力补偿方法,包括如下步骤:
5、第一步,理论层面分析电池电压降低对无人机位姿控制的影响;
6、第二步,构建考虑电池电压降低影响的无人机动力学模型;
7、第三步,根据霍普夫纤维化方法生成无人机能够实现的平滑姿态控制信号;
8、第四步,根据建立的无人机动力学模型设计位置环电压降低干扰观测器;
9、第五步,基于观测出的干扰值设计位置环控制律抑制扰动。
10、进一步地,所述第一步中,针对电机所产生升力、电机转速与电池电压的关系,进行以下理论分析:
11、在旋翼无飞行器飞行过程中,控制器对期望信号以及无人机实时状态信息进行计算处理得到所期望的电调输入信号,电调根据其输入信号的大小调节输出电压或电流的大小,从而实现电机的转速控制。然而,电调输入信号与输出信号大小的定量关系需要进行标定,从而实现电机转速的精准控制。一般情况下该定量关系并不随着无人机控制系统信号发生改变。
12、由于机载锂电池驱动电机运转并产生电路热损耗,其电池电量会逐渐降低。随着机载锂电池电量的减少,相应地其输出电压降低,进而在电调指令信号不变的情况下其输出的电机工作电压降低。针对无刷电机,其每分钟旋转次数与电机输入电压相关,相关参数为kv值。电机参数kv值描述该电机在空载条件下的峰值电压与转速之间的关系,单位:rpm/v,其中rpm是revolutions per minute的缩写,表示电机每分钟的旋转次数,v表示电机的输入电压。
13、可知,随着电机输入电压降低,相应地电机转速降低,无法实现控制器所期望的无人机控制效果。电压降低最为显著的影响之一为无人机总升力的降低,具体对应着各电机升力的减小,导致无人机位置控制及姿态控制效果不佳,增加无人机空中飞行的安全风险。
14、本发明中,认为电压降低最直接影响的是旋翼无人机各个电机的转速,进而影响各个电机所产生的升力,该干扰影响主要位于无人机位置控制环,即为位置环升力损失干扰。不考虑由于各个电机升力不同所产生的姿态环影响。
15、进一步地,所述第二步包括:
16、已知旋翼无人机动力学方程为:
17、,
18、其中,为机体坐标系,为地理坐标系,表示机体坐标系坐标转换成地理坐标系坐标所对应的旋转矩阵,表示无人机总升力,表示无人机所有电机产生的推力,表示无人机所受到的重力,表示无人机的质量,表示重力加速度,表示无人机的转动惯量,表示无人机的旋转角速度,上标表示一阶导数,例如表示的一阶导数,表示无人机的控制力矩。上标符号表示向量或矩阵的转置。具体可表示为:
19、。
20、由此,得到考虑电池电压降低影响的无人机动力学模型:
21、,
22、其中,表示旋翼无人机升力损失矢量。
23、进一步地,所述第三步包括:
24、利用霍普夫纤维化方法生成无人机能够实现的平滑姿态控制信号。已知所需辅助变量及,,,其中定义如下:
25、,
26、进一步地,可得,,及其一阶导数为:
27、,
28、。
29、由此可得旋翼无人机期望的角速度信号为:
30、,
31、其中,,表示,。
32、为获得期望姿态角信息,可借助辅助变量,计算四元数,进而获得旋转矩阵,辅助变量表达式及其与四元数的关系如下:
33、,
34、,
35、。
36、四元数与旋转矩阵转换的数学细节如下:
37、。
38、进一步地,由旋转矩阵元素结构可得:
39、。
40、由于actan函数值域范围限制,使用atan2函数代替atan作为求解反正切值的函数:
41、。
42、至此,得到了旋翼无人机姿态环控制期望信号。
43、进一步地,所述第四步包括:
44、构建与旋翼无人机姿态信息相解耦合的升力损失模型,如下:
45、,
46、其中,表示无人机升力损失值,可认为其由电池电压降低以及其他因素共同导致。
47、首先进行电压降低观测器的设计,通过借助辅助变量,可设计观测器增益矩阵,即生成以为对角线元素的3×3方阵,最终得到观测器结构:
48、,
49、其中,表示无人机在地理坐标系下的速度,,表示观测器所输出的的观测值。
50、进一步地,所述第五步包括:进行位置环抗干扰控制律设计:
51、令表示位置控制误差,其中下标表示期望信号,表示位置信息,表示速度控制误差,表示位置信息,位置环抗干扰控制律可设计为如下形式:
52、,
53、其中,和表示控制器增益,表示旋翼无人机升力损失矢量的估计量,由电压降低观测器提供。表示旋翼无人机期望轨迹的二阶导数,即期望轨迹所对应的期望加速度,表示在地理坐标系下旋翼无人机的期望升力。
54、本发明的有益效果在于:
55、本发明能够实现旋翼无人机在遭遇电池电压降低问题时,实现升力的实时补偿,保证其空中安全稳定飞行的控制能力。相比于传统的抗干扰控制方法,本发明首先针对电池电压降低对旋翼无人机位姿控制的影响进行理论分析,构建考虑电池电压降低影响的无人机动力学模型。在此基础上,将旋翼无人机升力损失量与其自身状态相解耦合,设计了电池电压降低观测器。最后提供了一种抗电池电压降低干扰的旋翼无人机控制律。本发明可以应用于现有大多数的旋翼无人机,以真正赋予其大机动且高精度飞行或长时间飞行的能力,保证无人机在执行大机动飞行或长时间飞行任务时具有较高的飞行品质。
本文地址:https://www.jishuxx.com/zhuanli/20241015/315588.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表