持械臂和手术机器人的制作方法
- 国知局
- 2024-10-15 09:57:18
本发明涉及医疗器械,具体而言涉及一种持械臂和手术机器人。
背景技术:
1、医疗手术机器人具有定位准确、运行稳定、灵巧性强、工作范围大、不怕辐射和感染等优点,广泛的应用于各种手术中。手术机器人的使用有助于提高外科医生手术的精度,解决外科医生手部的颤抖、疲劳、肌肉神经的反馈,能够使医生在最舒适的状态下进行手术操作,对于提高手术成功率、减轻患者痛苦具有重要价值,近年来其研究已经成为医疗器械应用的新领域。
2、手术机器人的操作臂常具有一个或多个直线驱动模组,以实现操作臂的末端器械驱动器及手术器械在横向或纵向的直线运动。直线驱动模组在实现直线运动的基础上,还需要在手术操作臂和器械驱动器之间传递动力信号、控制信号等,这些信号的传递可以通过柔性的扁平线缆实现。
3、由于直线驱动模组的动部与定部是存在相对运动的,柔性扁平线缆两端分别连接至动部和定部的电子器件,因此柔性扁平线缆会随着动部的运动而发生形变。但是柔性扁平线缆过于柔软,其运动过程中的形变不可控,可能会与其周边的部件发生剐蹭、缠绕甚至干涉而产生破损,从而造成短路、断路,并且还会使得动部的运动摩擦力增大,甚至出现运动卡滞的风险。
4、因此,需要一种持械臂和手术机器人,以至少部分地解决以上问题。
技术实现思路
1、在技术实现要素:部分中引入了一系列简化形式的概念,这将在具体实施例部分中进一步详细说明。本发明的发明内容部分并不意味着要试图限定出所要求保护的技术方案的关键特征和必要技术特征,更不意味着试图确定所要求保护的技术方案的保护范围。
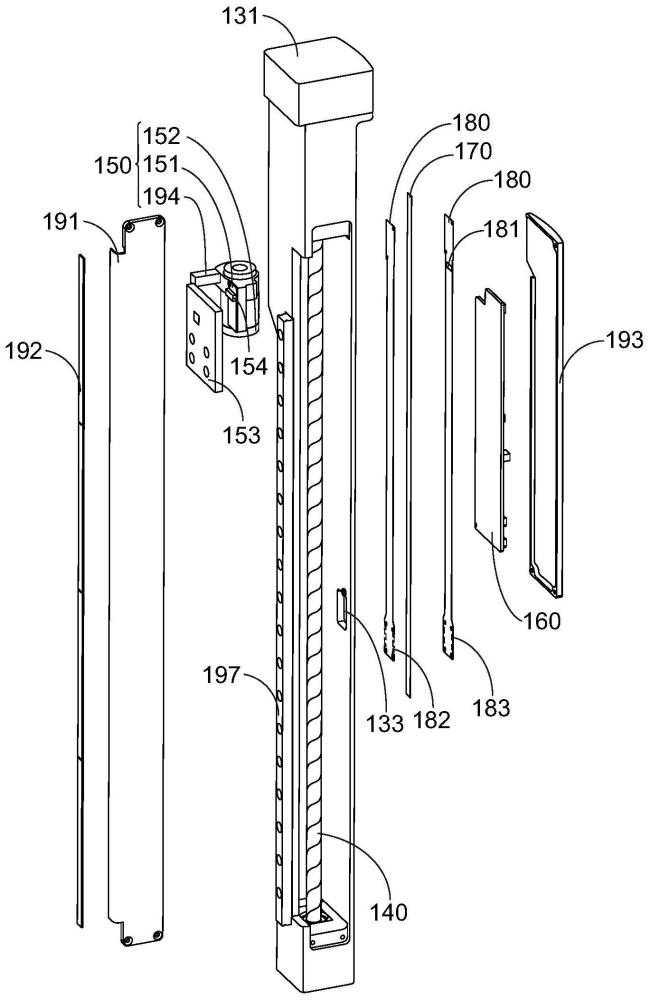
2、为至少部分地解决上述问题,根据本发明的第一方面,提供了一种持械臂机构,用于手术机器人,所述持械臂机构包括:
3、臂主体;
4、丝杆,所述丝杆沿着所述臂主体的长度方向设置于所述臂主体,并且所述丝杆能够相对于所述臂主体旋转;
5、可动组件,所述可动组件设置于所述丝杆,并且能够随着所述丝杆的旋转沿所述丝杆的轴向方向相对于所述丝杆移动,所述可动组件包括可动电路板,所述可动电路板上设置有可动连接器,
6、固定电路板,所述固定电路板设置于所述臂主体,并且所述固定电路板上设置有固定连接器;
7、柔性线缆,所述柔性线缆的一端与所述可动连接器电连接,所述柔性线缆的另一端与所述固定连接器电连接;以及
8、一对保护带,所述一对保护带的一端与所述可动组件固定连接,所述一对保护带的另一端与所述臂主体固定连接,
9、其中,所述柔性线缆的除两端以外的部分被夹持在所述一对保护带之间。
10、根据本发明的持械臂机构,通过设置一对保护带,并且将柔性线缆的除两端以外的部分夹持在该一对保护带之间,使得柔性线缆在运动过程中的形变可控,以避免柔性线缆与其附近的部件发生剐蹭、缠绕甚至干涉,降低柔性线缆破损、短路、断路的可能性。
11、可选地,所述可动组件包括丝杆螺母,所述丝杆螺母套设于所述丝杆,以随着所述丝杆的旋转沿所述丝杆的轴向方向相对于所述丝杆移动,所述可动电路板相对于所述丝杆螺母固定设置,所述一对保护带的一端相对于所述丝杆螺母固定设置。
12、可选地,所述可动组件还包括连接件,所述连接件与所述丝杆螺母相对固定设置,所述可动电路板固定设置于所述连接件,所述一对保护带的一端固定设置于所述可动电路板和所述连接件中的至少一者。
13、可选地,所述一对保护带的一端被夹持在所述可动电路板和所述连接件之间,并且连接至所述可动电路板和所述连接件中的至少一者。
14、可选地,所述一对保护带的一端通过紧固件连接至所述可动电路板和所述连接件中的至少一者,并且/或者
15、所述一对保护带的另一端通过紧固件连接至所述臂主体。
16、可选地,所述一对保护带中的一者包括设置在至少一端的端部或者靠近端部的第一通孔,所述柔性线缆的端部延伸穿过所述第一通孔并朝向所述一对保护带的外侧延伸。
17、可选地,所述一对保护带中的一者包括设置在至少一端的端部或者靠近端部的凸缘,所述一对保护带中的另一者对应地包括插接孔,所述凸缘插接至所述插接孔。
18、可选地,所述凸缘和所述插接孔的数量相等并且为至少一对,至少一对所述凸缘设置在所述一对保护带中的一者的至少一端的两侧,所述柔性线缆的端部沿所述一对保护带的长度方向延伸超出所述一对保护带,并且设置在沿所述一对保护带的宽度方向的至少一对所述凸缘之间。
19、可选地,所述持械臂机构还包括导轨、滑块和器械驱动器,所述导轨沿着所述臂主体的长度方向设置于所述臂主体,所述滑块可移动的设置于所述导轨,所述滑块与所述丝杆螺母相对固定设置,所述滑块与所述丝杆螺母共同沿着所述导轨的长度方向可移动,所述器械驱动器连接至所述滑块,所述器械驱动器用于连接手术器械。
20、可选地,所述持械臂机构还包括第一盖和垫片,所述第一盖连接至所述臂主体并且至少覆盖在所述丝杆和所述可动组件的外侧,所述垫片设置在所述第一盖的内侧,并且将所述一对保护带和所述第一盖隔开。
21、可选地,所述保护带的宽度不小于所述柔性线缆的宽度。
22、可选地,所述臂主体设置有凹槽,所述固定电路板设置在所述凹槽中,所述持械臂机构还包括第二盖,所述第二盖连接至所述臂主体,并且能够遮挡所述凹槽。
23、可选地,所述凹槽和所述柔性线缆分别设置在所述臂主体的两侧,所述凹槽的底部设置有第二通孔,所述柔性线缆的另一端延伸穿过所述第二通孔并进入到所述凹槽中。
24、可选地,所述保护带的材质选自金属材质、pc材质或pet材质。
25、根据本发明的第二方面,公开了一种手术机器人,其包括根据上述第一方面中任一项所述的持械臂机构。
技术特征:1.一种持械臂机构,用于手术机器人,其特征在于,所述持械臂机构包括:
2.根据权利要求1所述的持械臂机构,其特征在于,所述可动组件包括丝杆螺母,所述丝杆螺母套设于所述丝杆,以随着所述丝杆的旋转沿所述丝杆的轴向方向相对于所述丝杆移动,所述可动电路板相对于所述丝杆螺母固定设置,所述一对保护带的一端相对于所述丝杆螺母固定设置。
3.根据权利要求2所述的持械臂机构,其特征在于,所述可动组件还包括连接件,所述连接件与所述丝杆螺母相对固定设置,所述可动电路板固定设置于所述连接件,所述一对保护带的一端固定设置于所述可动电路板和所述连接件中的至少一者。
4.根据权利要求3所述的持械臂机构,其特征在于,所述一对保护带的一端被夹持在所述可动电路板和所述连接件之间,并且连接至所述可动电路板和所述连接件中的至少一者。
5.根据权利要求3所述的持械臂机构,其特征在于,
6.根据权利要求1所述的持械臂机构,其特征在于,所述一对保护带中的一者包括设置在至少一端的第一通孔,所述柔性线缆的端部延伸穿过所述第一通孔并朝向所述一对保护带的外侧延伸。
7.根据权利要求1所述的持械臂机构,其特征在于,所述一对保护带中的一者包括设置在至少一端的凸缘,所述一对保护带中的另一者对应地包括插接孔,所述凸缘插接至所述插接孔。
8.根据权利要求7所述的持械臂机构,其特征在于,所述凸缘和所述插接孔的数量相等并且为至少一对,至少一对所述凸缘设置在所述一对保护带中的一者的至少一端的两侧,所述柔性线缆的端部沿所述一对保护带的长度方向延伸超出所述一对保护带,并且设置在沿所述一对保护带的宽度方向的至少一对所述凸缘之间。
9.根据权利要求2所述的持械臂机构,其特征在于,所述持械臂机构还包括导轨、滑块和器械驱动器,所述导轨沿着所述臂主体的长度方向设置于所述臂主体,所述滑块可移动的设置于所述导轨,所述滑块与所述丝杆螺母相对固定设置,所述滑块与所述丝杆螺母共同沿着所述导轨的长度方向可移动,所述器械驱动器连接至所述滑块,所述器械驱动器用于连接手术器械。
10.根据权利要求1至9中任一项所述的持械臂机构,其特征在于,
11.根据权利要求1至9中任一项所述的持械臂机构,其特征在于,所述保护带的宽度不小于所述柔性线缆的宽度。
12.根据权利要求1至9中任一项所述的持械臂机构,其特征在于,所述臂主体设置有凹槽,所述固定电路板设置在所述凹槽中,所述持械臂机构还包括第二盖,所述第二盖连接至所述臂主体,并且能够遮挡所述凹槽。
13.根据权利要求12所述的持械臂机构,其特征在于,所述凹槽和所述柔性线缆分别设置在所述臂主体的两侧,所述凹槽的底部设置有第二通孔,所述柔性线缆的另一端延伸穿过所述第二通孔并进入到所述凹槽中。
14.根据权利要求1所述的持械臂机构,其特征在于,所述保护带的材质选自金属材质、pc材质或pet材质。
15.一种手术机器人,其特征在于,包括根据权利要求1至14中的任一项所述的持械臂机构。
技术总结本发明公开了一种持械臂机构和手术机器人,持械臂机构包括臂主体、丝杆、可动组件、固定电路板、柔性线缆和一对保护带;丝杆沿着臂主体的长度方向设置于臂主体且能够相对于臂主体旋转;可动组件设置于丝杆且随着丝杆的旋转沿丝杆的轴向方向移动,可动组件包括可动电路板,可动电路板上设置有可动连接器,固定电路板设置于臂主体且设置有固定连接器;柔性线缆的一端与可动连接器电连接,另一端与固定连接器电连接;一对保护带的一端与可动组件固定连接,另一端与臂主体固定连接;柔性线缆的除两端以外的部分被夹持在一对保护带之间。根据本发明的持械臂机构,使得柔性线缆在运动过程中的形变可控,避免其与附近的部件发生剐蹭、缠绕甚至干涉。技术研发人员:请求不公布姓名受保护的技术使用者:深圳康诺思腾科技有限公司技术研发日:技术公布日:2024/10/10本文地址:https://www.jishuxx.com/zhuanli/20241015/315870.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表